Изобретение относится к машиностроению и. может быть использовано в механизмах для перемотки ленточного материала.
Цель изобретения - повышение долговечности путем уменьшения трения в фрикционных парах.
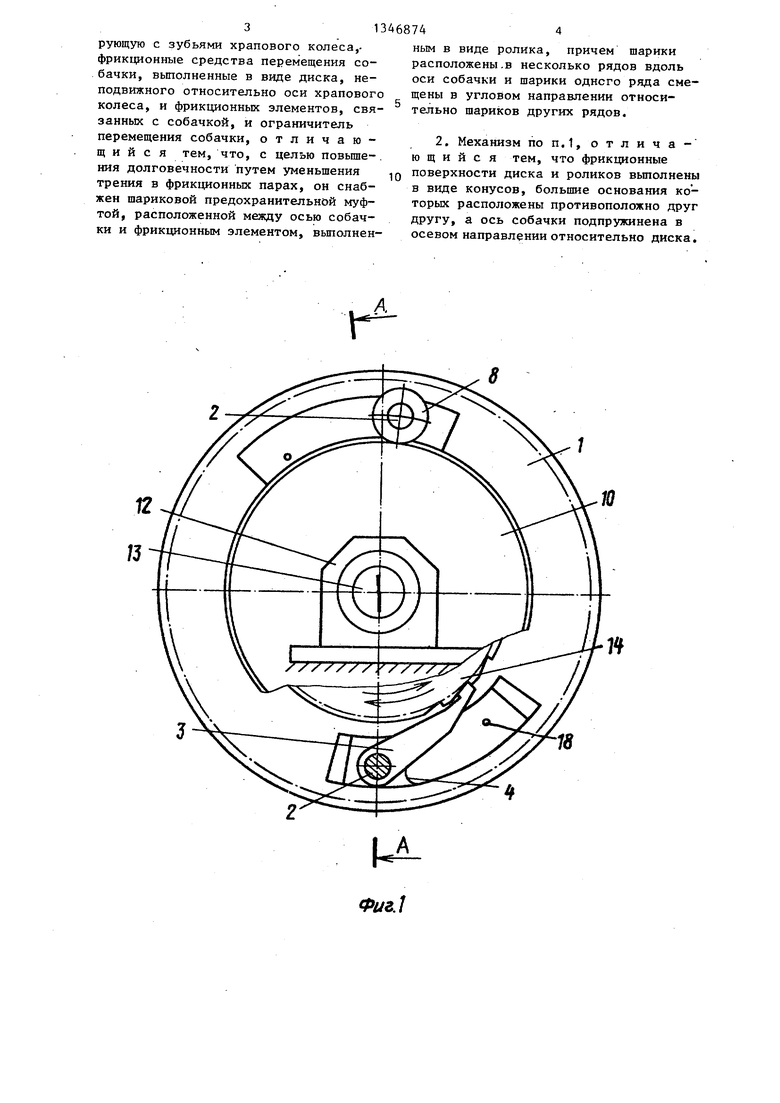
На фиг.1 показан храповой механизм, на фиг.2 - разрез А-А на фиг.1 на фиг.З - разрез Б-Б на фиг-,2,
Храповой механизм свободного хода содержит обойму 1, на которой на оси 2 установлена собачка 3, подпружиненная пружиной 4. Собачка жестко свя- зава с осью 2, например, винтом 5. В оси 2 имеются отверстия, в которых установлены пружины 6 и шарики 7, контактирующие с впадинами на внутренней поверхности ролика 8, образуя Предохранительную муфту и обеспечива передачу крутящего момента от ролика оси и собачке.
На оси 2 имеется пружина 9, которая поджимает ролик 8 к диску 10. Усилие сжатия пружины регули руется гайкой 11. Диск 10 зафиксирован неподвижно на опоре 12 и оси 13 соос- но обойме 1 и храповому колесу 14, которое жестко, например, шпонкой 15 установлено на ступице барабана 16, на котором намотана обрабатываемая лента 17. Обойма 1 свободно вращается на ступице храпового колеса 14. Крайнее положение собачки 3 в расцепленном положении фиксируется ограничителем 18. Подпружиненные ща- рики 7 расположены со смещением вдол оси 2 и шарики размещены под углом . друг к другу, например, равным половине угла между двумя впадинами 19 ролика 8. Фрикционные поверхности диска 10 и ролика 8 выполнены в виде конусов, больвше основания которьк расположены противоположно друг другу
Механизм работает следущим образом.
Вращение обоймы 1 против часовой стрелки передается на ролик 8, кото- рьй начинает вращаться против часовой стрелки, обкатьшаясь по непод- вижному диску. Собачка 3 входит в зацепление с храповым колесом 14, тем самым приводя его во вращение. Так как храповое колесо 14 связано со ступицей барабана 16, он также начинает вращаться против часовой стрелки. Происходит наматьгаание материала на барабан 16. В данном слу0
5
0
5
чае происходит режим намотки и барабан- 16 является ведущим.
При вращении обоймы по-часовой стрелке ролик 8 начинает вращаться также по часовой стрелке по неподвижному коническому диску 10. Собачка 3, которая жестко закреплена на оси 3 вращающегося ролика 8, выходит из зацепления с храповым колесом 14. При этом ролик 8, впадины 19 которого контактируют с подпружиненными шариками, вращаются совместно с осью 2 и собачкой 3 за счет возникшего крутящего момента между шариками 7 и роликом 8. Вращение ролика 8 происходит до того момента, пока собачка 3 не достигнет ограничителя 18, затем происходит разрьш жесткого соединения между обоймой 1, храповым колесом 14 и барабаном 16. При фиксации собачки 3 ограничителем 18 ролик 8 продолжает вращаться по неподвижному диску 10, при этом подпружиненные шарики 7, контактирующие с впадинами 19 ролика 8, начинают вы- /ходить из впадин 19, а шарики 7, контактирующие с внутренней поверхностью ролика 8, входят в соседнюю впадину ролика 8. Этим обеспечивается передача постоянного крутящего момен- та оси 2 и собачке 3, а ролик 8 имеет возможность свободно обкатьтаться по диску 10, Барабан 16 в данном случае является ведомым, т.е. сматьшание материала 17 с него происходит под усилием наматывания ленты, при этом барабан вращается с ускорением, так как его диаметр меняется от максимального до минимального.
Предлагаемьй механизм позволяет повысить надежность (нет сильно греющихся пар трения скольжения) и долговечность (нет сильного износа пар трения скольжения), так как управление собачкой происходит за счет сил трения качения передающих элементов.
Кроме этого, имеется возможность применять такой механизм в условиях больших скоростей вращения, например, при перемотке длинномерных ленточных материалов.
Формула изобретения
0
5
0
5
0
1. Храповой механизм свободного хода, содержащий храповое колесо, охватьшаюцую его обойму, установленную в ней на оси собачку, контактирующуго с зубьями храпового колеса,- фрикционные средства перемещения собачки, вьтолненные в виде диска, неподвижного относительно оси храпового колеса, и фрикционных элементов, связанных с собачкой, и ограничитель перемещения собачки, отличающийся тем, что, с целью повыше-. ния долговечности путем уменьшения трения в фрикционных парах, он снабжен шариковой предохранительной муфтой, расположенной между осью собачки и фрикционным элементом, выполнен
ным в виде ролика, причем шарики расположены.в несколько рядов вдоль оси собачки и шарики одного ряда смещены в угловом направлении относительно шариков других рядов.
2. Механизм поп,1, отличающийся тем, что фрикционные поверхности диска и роликов вьтолнены в виде конусов, большие основания которых расположены противоположно друг другу, а ось собачки подпружинена в осевом направлении относительно диска.
t
18
Фиг.
Редактор А.Козориз
Составитель Л.Атрушкевич
Техред И.Попович Корректор М.Демчик
Заказ 5111/36 Тираж 803Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Фиг. 5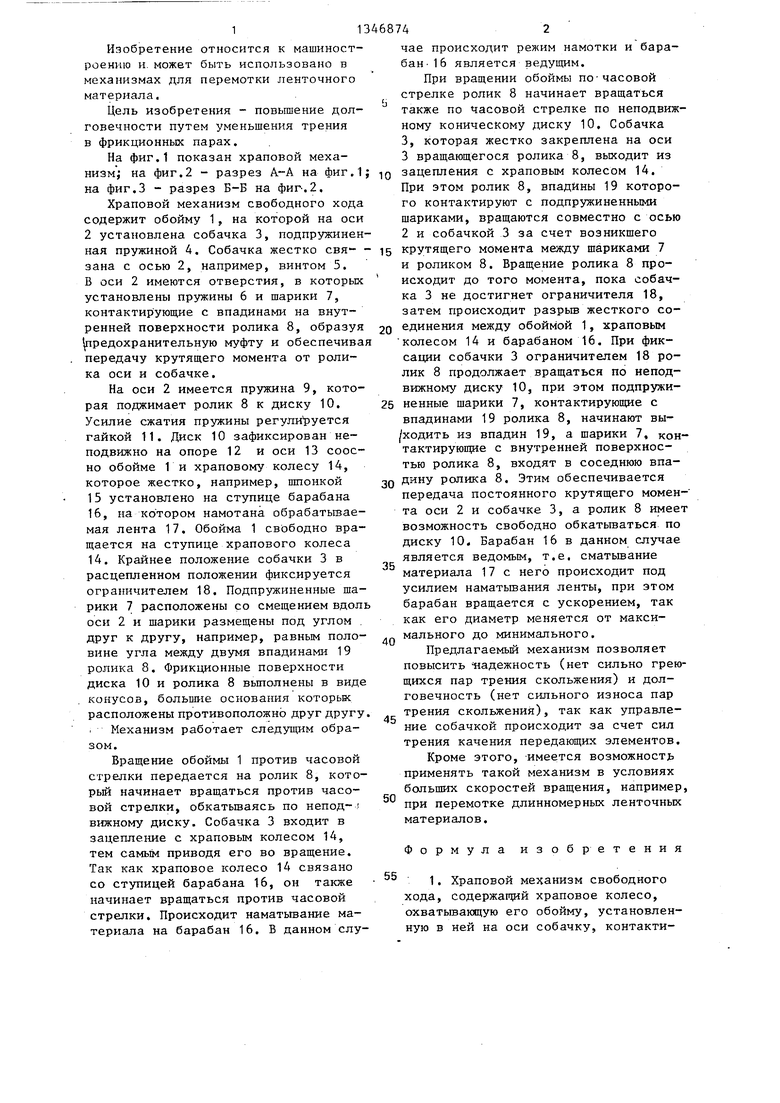
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЯГОВАЯ ЛЕБЕДКА | 1998 |
|
RU2153461C2 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА К РОЛИКОВОМУ КОЛЕСУ | 2005 |
|
RU2312694C2 |
| Храповый механизм | 1985 |
|
SU1328609A1 |
| Устройство для бесконтактной передачи электроэнергии от неподвижного объекта к подвижному | 1976 |
|
SU682975A1 |
| УСТАНОВКА ДЛЯ НАМОТКИ ЛЕНТЫ НА ОПРАВКУ | 2008 |
|
RU2399575C2 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ, НАПРИМЕР, ГИБКОГО КАБЕЛЯ | 1971 |
|
SU412650A1 |
| Устройство для удержания горного комбайна | 1983 |
|
SU1138494A1 |
| Ручная лебедка | 1985 |
|
SU1258809A1 |
| ФОТОГРАФИЧЕСКИЙ АППАРАТ | 1972 |
|
SU340213A1 |
| ХРАПОВЫЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1997 |
|
RU2119601C1 |
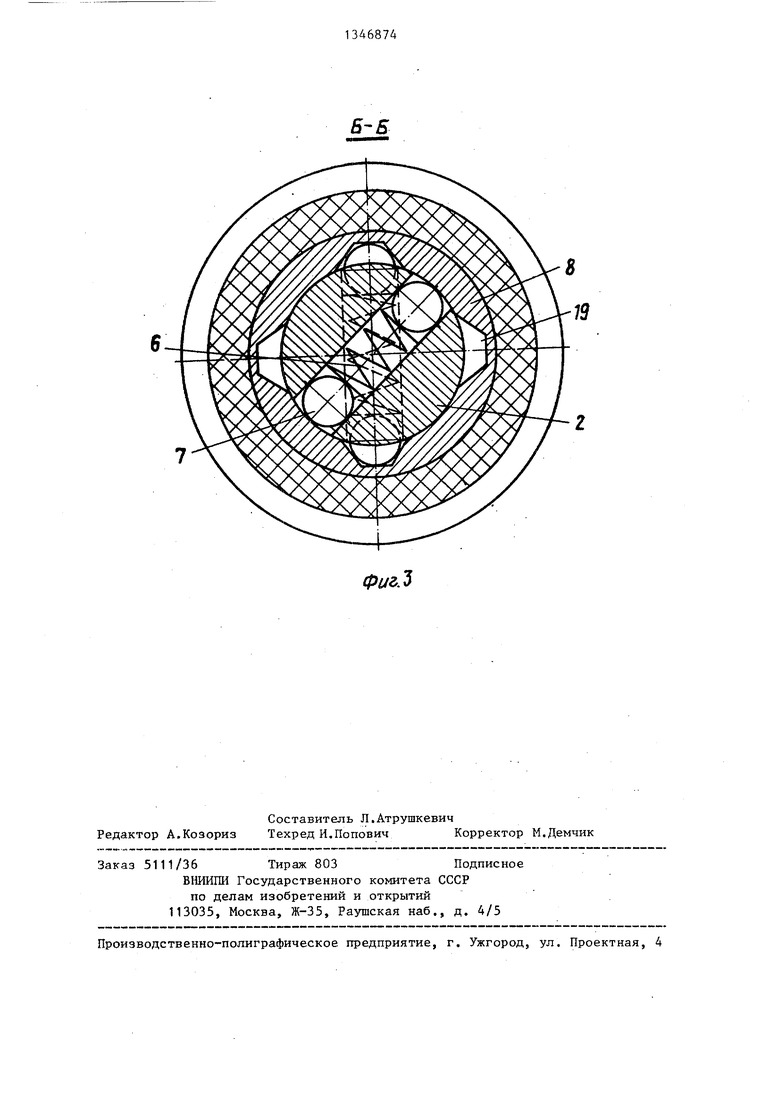
Изобретение относится к машиностроению и может быть использовано в механизмах для перемотки ленточного материала. Целью изобретения является повышение долговечности путем уменьшения трения в фрикционных парах. Храповой механизм свободного хода содержит обойму 1 с собачкой 3, взаимодействующей с храповым колесом 14. Фрикционные средства перемещения собачки вьшолнены в виде неподвижного диска .10 и ролика (Р) 8. Последний связан через шариковую предохрани- тельную муфту с осью собачки. Ролик 8, обкатьшаясь по диску 10, при вращении обоймы 1 поворачивает через предохранительную муфту ось собачки, которая входит в зацепление с храповым колесом. При вращении обоймы 1 в противоположном направлении Р 8, обкатываясь по диску 10, вьшодит собачку 3 из зацепления с храповым колесом, фиксируя ее положение. Дальнейшее вращение Р 8 на ось собачки не передается, так как срабатывает предохранительная муфта. 1 з.п. ф-лы, 3 ил. (Л W 05 эо 
| Механизм одностороннего вращения | 1983 |
|
SU1104318A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Храповой механизм свободного хода | 1981 |
|
SU1027448A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
