Фие.2
Изобретение относится к конструкциям схватов манипуляционных механизмов, обслуживающих прессовое оборудование горячей штамповки, с повышенными требованиями к стабильности температурного режима, например для штамповки точных изделий с использованием эффекта сверхпластичности.
Целью изобретения является улучшение эксплуатационных возможностей конструкции.
Указанная цель достигается тем, что конструкция комплекса обеспечивает изоляцию разогретой заготовки от внешней среды.
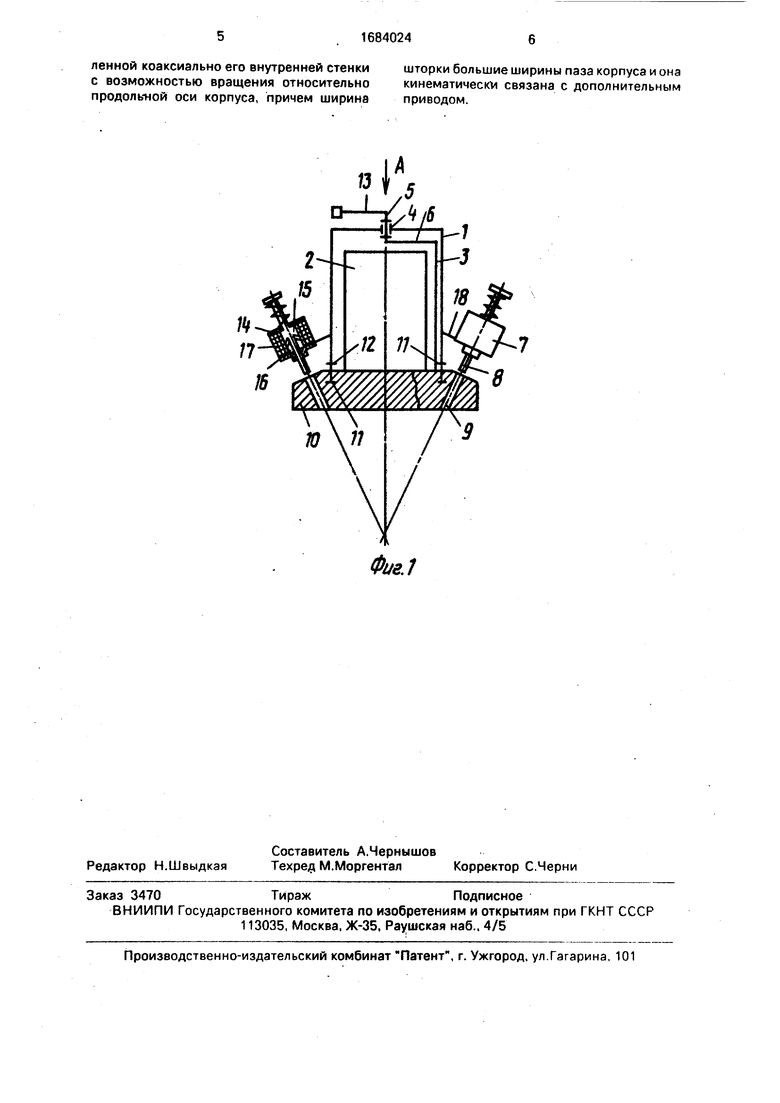
На фиг. 1 изображена конструкция комплекса; на фиг. 2 - вид А на фиг. 1.
Комплекс состоит из цилиндрического корпуса 1 типа стакана с пазом вдоль образующей, ширина которого превышает диа- метральный габарит захватываемого изделия 2. Внутри корпуса 1 и коаксиально его внутреннему диаметру смонтирована шторка 3 с шириной, превышающей ширину паза в корпусе 1, и длиной, превышающей длину того же корпуса 1. Шторка 3 закреплена в подшипнике 4 глухого торца корпуса 1 посредством оси 5 и радиальной тяги 6 с возможностью вращения вокруг оси корпуса 1. К корпусу 1 в радиальных и смещенных один относительно другого под углами в 120° направлениях прикреплены пальцевые захваты 7, Оси пальцев 8 захватов 7 расположены под углом к оси корпуса 1 и пересекают последнюю в одной точке. Кроме того, пальцы 8 захватов 7 соосны отверстиям 9 в технологической съемной платформе 10 изделия 2 и выполнены с возможностью контактирования с данными отверстиями 9, Платформа 10 содержит также кольцевой буртик 11 с упором 12, причем диаметр буртика 11 и корпуса 1 равны между собой. В кольцевом буртике 11 предус- монтрен паз с шириной, равной ширине паза в корпусе 1, и с высотой, равной высоте буртика 11. Длина шторки 3 превышает длину корпуса 1 на высоту буртика 11. К оси 5 шторки 3 прикреплен рычаг 13, предусмотренный для взаимодействия с приводами (не показаны) в позициях захвата изделия и его разгрузки. Захват 7 содержит подпружиненный относительно корпуса палец 8, который скреплен с якорем 15 и выполнен с возможностью осевого перемещения. В корпусе 14 смонтированы также статор 16 и обмотка 17. Корпус 14 захвата 7 кронштейном 18 связан с корпусом 1. Корпус 1 имеет также переходный фланец 19 для связи с рукой манипулятора (не показан).
Комплекс работает следующим образом.
Изделие 2, расположенное на технологической термоизоляционной платформе
10, разогревается до требуемой температуры в печи. Далее изделие 2 на платформе 10 выдается механизмом печи в координату захвата. После этого рука манипулятора по криволинейной траектории выносит корпус
0 1с захватами 7 соосно с изделием 2 и базирует корпус 1 на упоры 12 буртика 11. Изделие 2 проходит внутрь корпуса 1 через паз. По команде системы управления подается питающее напряжение на обмотки 17 элек5 тромагнитов. Якорь 15 притягивается к статору 16, при этом жестко скрепленный с якорем палец 8 движется в осевом направлении и входит в отверстие 9 платформы 10. Происходит скрепление корпуса 1 и плат0 формы 10 друг с другом. Манипулятор начинает цикл переноса взаимосвязанной системы к штампу. При этом рычаг 13 шторки 3 взаимодействует с приводом печи (не показан), вращает шторку 3 в подшипнике 4
5 корпуса 1, которая перекрывает пазы как корпуса 1, так и кольцевого буртика 11. Изделие 2 оказывается изолированным от внешней среды, а температурный режим под кожухом стабилизируется.
0В зоне разгрузки изделия 2 рычаг 13
вновь контактирует с приводом, смонтированным на прессе (не показан), и шторка 3 смещается в исходное положение, открывая пазы корпуса и буртика 11. Отключается пи5 тание обмоток 17 захватов 7. Подпружиненные относительно корпусов 14 пальцы 8 совместно с якорями 15 отходят в первоначальные положения и из отверстий 9 платформы 10. Связь между платформой 10 и
0 корпусом 1 разрывается. Далее манипулятор по криволинейной траектории выносит корпус 1 захватами 7 из зоны взаимодействия с изделием 2 и возвращает их к печи. Цикл повторяется.
5Формула изобретения
Захватный комплекс, преимущественно для разогретых деталей, содержащий корпус с. установленными на нем захватными элементами и платформой для установки на
0 нее детали, причем платформа имеет возможность взаимодействия с захватными элементами, отличающийся тем, что, с целью улучшения эксплуатационных возможностей, корпус выполнен в виде полого
5 стакана, на боковой поверхности которого установлены захватные элементы, kpoMe того, в боковой поверхности корпуса по образующей выполнен паз, ширина которого превышает профильный размер детали, причем корпус снабжен шторкой, установленной коаксиально его внутренней стенки с возможностью вращения относительно продоль-ной оси корпуса, причем ширина
шторки большие ширины паза корпуса и она кинематически связана с дополнительным приводом.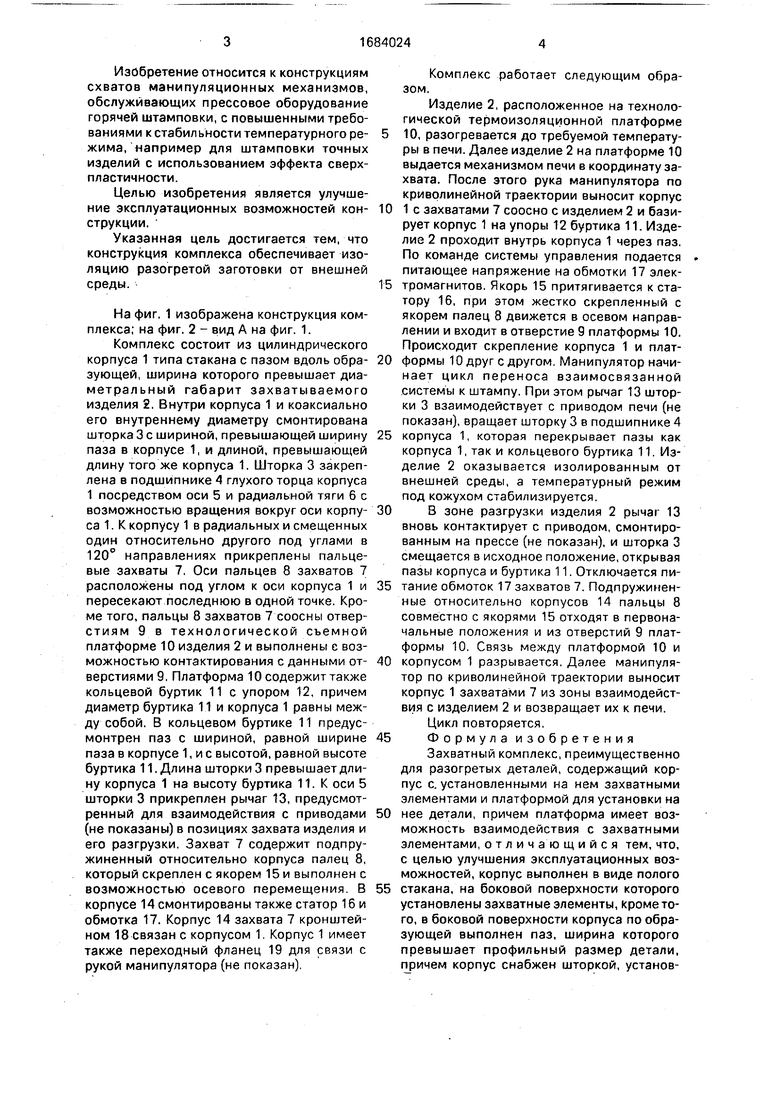
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированный комплекс горячей штамповки | 1988 |
|
SU1613235A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Установка для автоматической штамповки | 1980 |
|
SU867671A1 |
| Захватное устройство | 1988 |
|
SU1650432A1 |
| КОНТРОЛЬНО-СОРТИРОВОЧНЫЙ КОМПЛЕКС | 1990 |
|
RU2023571C1 |
| Переналаживаемый комплекс для штамповки | 1990 |
|
SU1801684A1 |
| Головка манипулятора | 1990 |
|
SU1811485A3 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| Автоматизированная линия для листовой штамповки | 1985 |
|
SU1319981A1 |
| Манипулятор | 1980 |
|
SU869931A1 |
Изобретение относится к конструкциям схватов манипуляторных механизмов, обслуживающих прессовое оборудование горячей штамповки. Целью изобретения является улучшение эксплуатационных возможностей конструкции. Захватный комплекс содержит корпус 1 с пазом вдоль образующей. Внутри корпуса смонтирована шторка 3, имеющая возможность закрывать паз. К корпусу прикреплены захваты 7. Кроме того, комплекс снабжен платформой 10. на которой находится нагретая деталь 2. Последняя 2 из печи в зону захвата подается на платформе 10. Деталь 2 проходит внутрь корпуса 1 через паз. Далее срабатывают захваты 7, входя в контакте платформой 10. Дополнительный привод закрывает паз шторкой 3. Манипулятор переносит платформу 10с деталью 2 к штампу, при этом деталь 2 изолирована от внешней среды и ее температурный режим стабилизирован. 2 ил. зм Ј
ФИ9.1
| Захватный комплекс | 1987 |
|
SU1502294A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
