изменением производительности питателя изменяют заданные значения уровня запаса материала в камере дробления и производительности питателя в зависимости от вычисленного отношения мощности к производительности, причем с ростом вычисленного отношения мощности к производительности уменьшают заданное значение производительности питателя и увеличивают заданное значение уровня запаса материала, а изменение производительности питателя осуществляют до достижеt
Изобретение относится к автоматизации процесса дробления в конусных дробилках, широко применяемых в горно-обогатительной промышленности.
Целью изобретения является повышение качества процесса регулировани загрузки дробильного агрегата при изменении физико-механических свойств продукта дробления.
Сущность способа управления состоит в обеспечении максимально возможной производительности за счет обеспечения равенства входной производительности дробилки (производительности питателя) и выходной при изменении физико-механических свойств исходной руды. Это достигается путем поддержания оптимального уровня ис- ходного материала в камере дробления и стабилизацией производительности питателя на вновь заданном значении в момент достижения запасом материала в камере дробления вновь.заданного уровня.
На чертеже приведена структурная схема устройства, реализующего способ.
Устройство содержит двигатель 1 дробилки 2 с датчиком 3 мощности, который соединен с вычислительньш блоком 4, бункер 5, питатель 6 с датчиком 7 производительности, подключенным к вычислительному блоку 4 и регулятору 8 производительности, соединенному с блоком 9 памяти, который подключен к вычислительному блоку 4, регулятору 10 уровня, соения уровнем запаса материала измененного заданного значения, после чего стабилизируют производительность питателя. Устройство, реализующее данный способ, содержит двигатель 1 дробилки 2, датчик 3 мощности, вычислительный блок 4, бункер 5, питатель 6, датчик 7 производительности, регулятор 8 производительности, блок 9 памяти, регулятор 10 уровня, датчик 11 уровня, блок 12 коммутации и исполнительный механизм 13. 1 ил.
5
0
5
0
5
диненному с датчиком 11 уровня, и блоку 12 коммутации, который подключен к регулятору 8 производительности и исполнительному механизму I3 питателя 6.
Способ осуществляется следующим образом.
После пуска в работу дробилки 2 измеренные датчиком 3 мощность двигателя и датчиком 7 производительность питателя 6 подаются в вычислительный блок 4, где определяется отношение мощности, потребляемой приводным двигателем 1, к производительности питателя 6 (удельные затраты мощности на дробление, которые однозначно характеризуют физико-механические свойства исходного материала) .
На основании вычисленного блоком 4 отношения блок 9 памяти выдает задание по уровню регулятору 10 уровня и задание по производительности регулятору 8 производительности. Причем заданное значение уровня соответствует такому.запасу материала в камере дробления, который обеспечи- вает максимальную производительность дробилки при данных физико-механических свойствах исходного материала, а заданное значение производительности питателя 6 соответствует максимальной производительности дробилки при данной трудности дробления поступающей руды. Одновременно блок 9 выдает сигнал блоку 12 коммутации на подключение регулятора 10 уровня к
31349
исполнительному механизму 13. Регулятор 10 уровня, воздействуя на исполнительный механизм 13, изменяет производительность питателя 6 до тех пор, пока уровень исходного материала в дробилке не достигнет заданного значения. В момент достижения уровнем, измеренным датчиком 11, заданно
го значения блок 12 коммутации отклю- ю ной производительности (производи- чает регулятор 10 от исполнительного механизма 13 и подключает регулятор 8 производительности к исполнительнотельности питателя исходного матери ла) и выходной производительности дробилки при изменении физико-механических свойств исходной руды.
му механизму 13. Регулятор 8 стабилизирует производительность питателя 6 на заданном блоком 9 значении до тех пор, пока не произойдет изменение физико-механических свойств руды.
При изменении физико-механических свойств исходного материала изменится значение удельных затрат мощности на дробление (вычисленное блоком 4 отношение мощности, потребляемой приводным двигателем 1, к производительности питателя 6). При этом, если произойдет увеличение удельных затрат мощности, то блок памяти уменьшит задание регулятору 8 производительности и увеличит задание регулятору 10 уровня, а при уменьшении удельных затрат мощности на дробление увеличит задание регулятору 8 производительности и уменьшит задание регулятору 10 уровня. И в том и в другом случае блок 9 памяти одновременно вьщает сигнал на подключение регулятора 10 уровня к исполнительному механизму 13, при достижении запасом материала в камере дробления вновь заданного уровня блОк 12 отключит регулятор 10 уровня от исполнительного механизма 13 и подключит регулятор 8, который будет удерживать производительность питателя на вновь заданном значении до нового изменения физико-мехнических свойств исходного материала.
Редактор С.Пекарь
Составитель В.Алекперов
Техред А.Кравчук Корректор С.Шекмар
Заказ 5211/5Тираж 573Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Таким образом, использование сп.о-, соба позвол ит повысить качество регулирования процесса загрузки дробильного агрегата, уменьшить длительность переходного процесса регулирования и обеспечить максимально возможную производительность дробилки за счет обеспечения равенства входной производительности (производи-
тельности питателя исходного материала) и выходной производительности дробилки при изменении физико-механических свойств исходной руды.
5
0
5
0
5
0
5
Формула изобретения
Способ автоматического регулирования загрузки дробильного а;грегата, включающий измерения потребляемой приводным двигателем мощности и производительности агрегата по исходному питанию, вычисление величины отношения мощности к производительности и изменение производительности питателя, отличающийся тем, что, с целью повьш1ения качества процесса регулирования загрузки дробильного агрегата при изменении физико- механических свойств продукта дробления, измеряют уровень запаса материала в камере дробления дробилки и перед изменением производительности питателя изменяют заданные значения уровня запаса материала в камере дробления и производительности пита .теля в зависимости от вычисленного отношения мощности к производительности, причем с ростом вычисленного отношения мощности к производительности уменьшают заданное значение производительности питателя и увеличивают заданное значение уровня запаса материала, а изменение производительности питателя осуществляют до достижения уровнем запаса материала измененного заданного значения, после чего стабилизируют производительность питателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования загрузки дробильного агрегата | 1983 |
|
SU1158237A1 |
| Устройство для регулирования производительности дробилки | 1974 |
|
SU494188A1 |
| Устройство для управления многостадийным процессом дробления | 1982 |
|
SU1036374A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДРОБЛЕНИЯ | 2015 |
|
RU2595739C1 |
| Устройство для управления работой дробильной установки | 1981 |
|
SU961777A1 |
| Способ автоматического управления группой параллельно работающих дробилок | 1983 |
|
SU1178488A1 |
| Способ регулирования режима работы комплекса дробления и устройство для его осуществления | 1988 |
|
SU1570772A1 |
| Система автоматического управления группой параллельно работающих дробилок | 1983 |
|
SU1121038A1 |
| Устройство для регулирования производительности дробилки | 1983 |
|
SU1135493A1 |
| Способ автоматического управления технологическим процессом рудоподготовки | 1986 |
|
SU1373436A1 |
Изобретение относится к автоматизации процесса дробления в конусных дробилках в горно-обогатительной промышленности и позволяет повысить качество процесса регулирования загрузки дробильного агрегата при изменении физико-механических свойств продукта дробления. Для достижения этой цели измеряют потребляемую приводным двигателем мощность и производительность агрегата по исходному питанию, вычисляют величину отношения .мош;ности к производительности и изменение производительности питателя, измеряют уровень запаса материала в камере дробления дробилки и перед (Л со 4 о со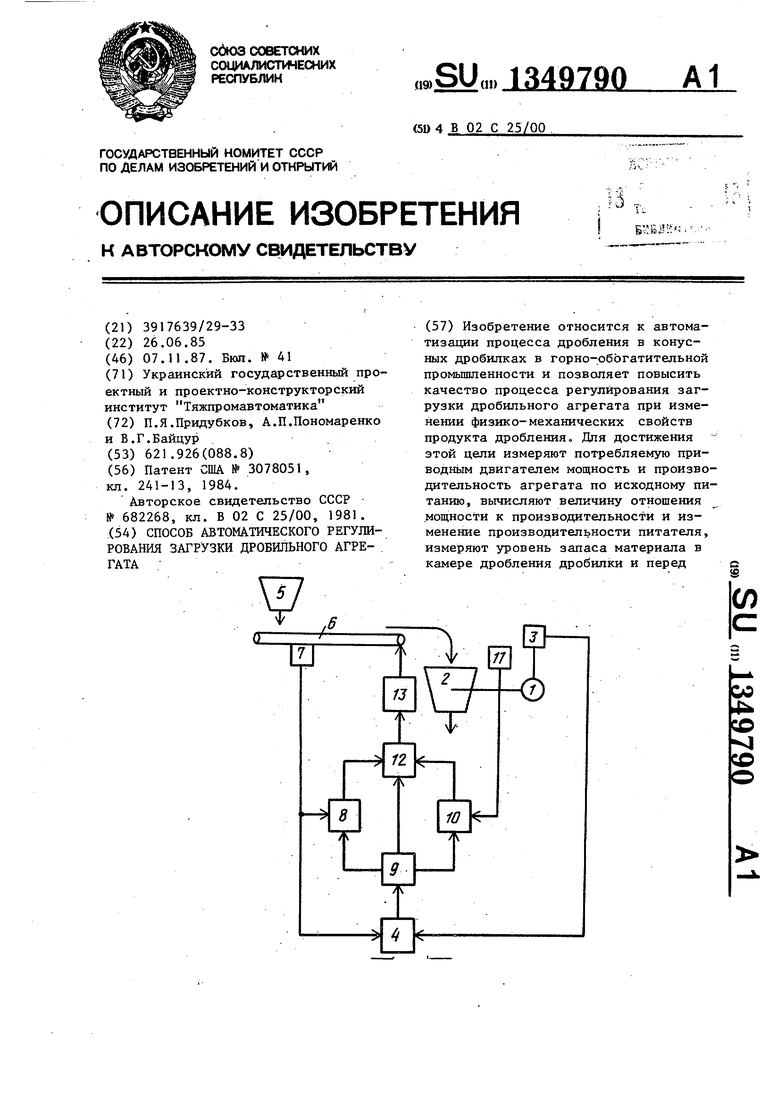
| Патент США № 3078051, кл | |||
| Одноколейная подвесная к козлам дорога | 1919 |
|
SU241A1 |
| Способ автоматического регулирования загрузки дробильного агрегата | 1978 |
|
SU682268A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
