Изобретение относится к машино- строению, и может быть использовано в гибких производственных системах для передачи заготовок в магазинах автоматического склада-накопителя на рабочую позицию технологического оборудования.
Цель изобретения - увеличение производительности и сокращение производственной площади за счет исключения пустых выработанных поддонов и технологического цикла робототехни- ческого комплекса.
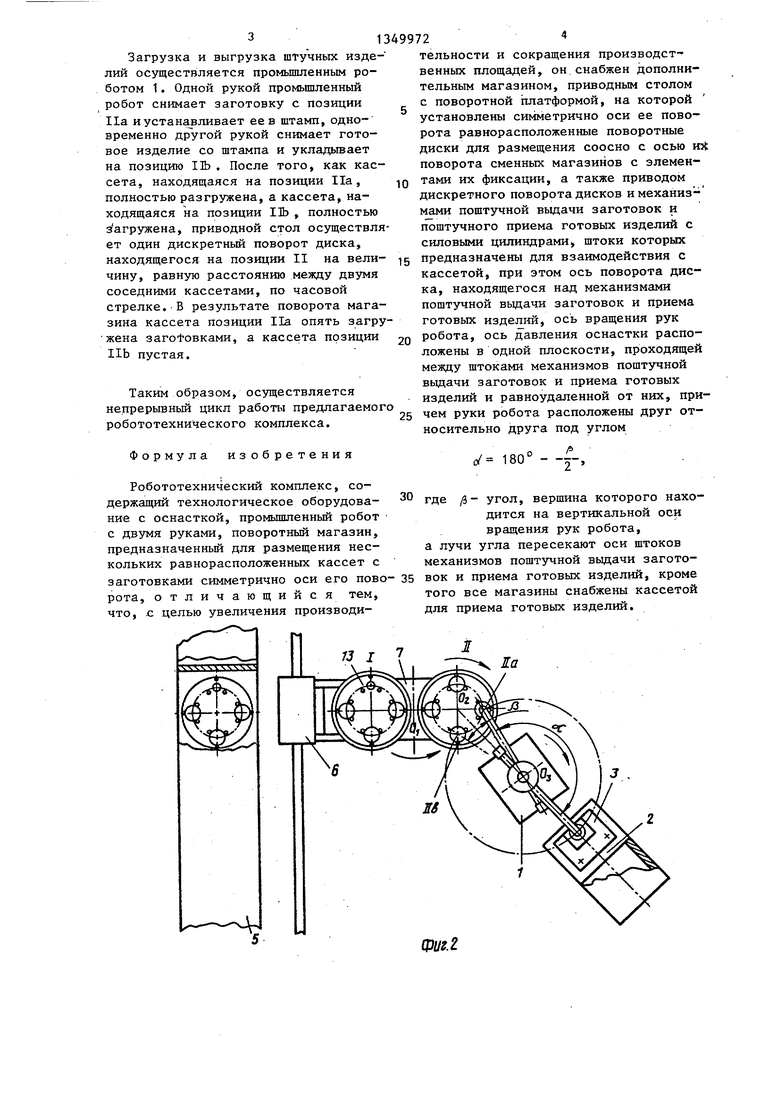
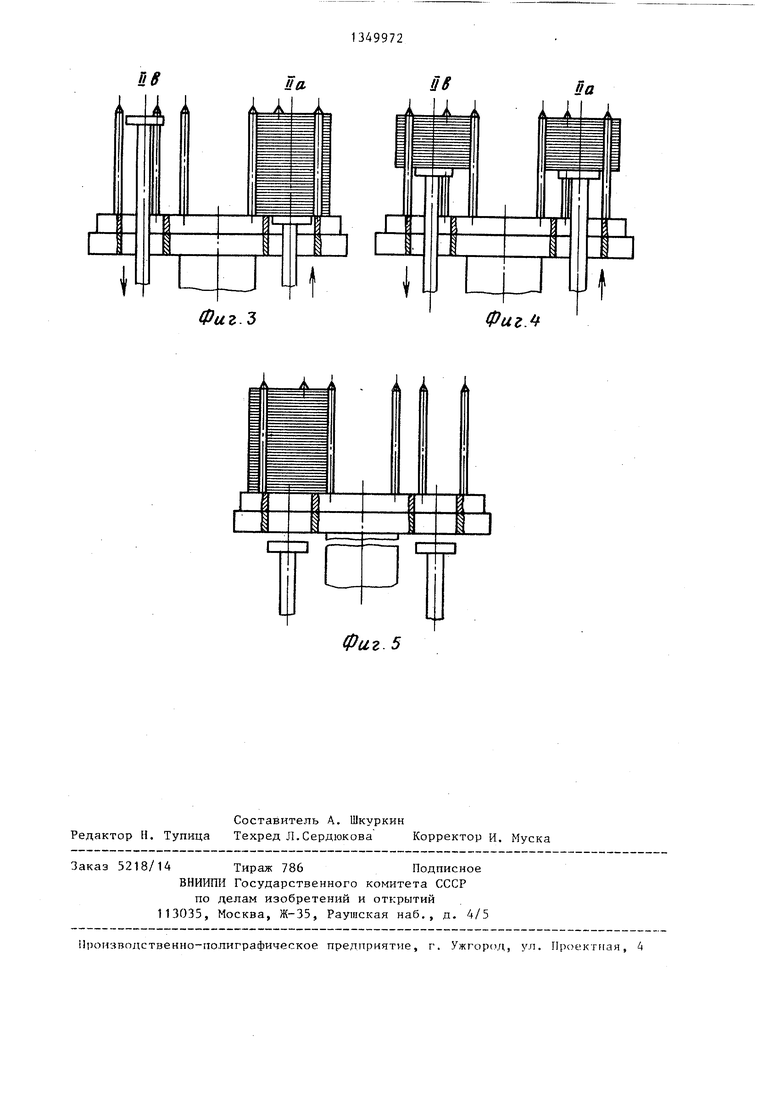
На фиг. 1 представлен робототехни ческий комплекс, вид спереди; на фиг. 2 - то же, вид сверху; на фиг.3 штоки механизма поштучного приема и вьщачи заготовок приводного стола,
исходное положение; на фиг, 4 - то же, промежуточное положение; на фиг. 5
положение, при котором осуществляется
25
30
40
дискретный поворот диска на величину, равную расстоянию между кассетами, или поворот платформы на 180.
Робототехнический комплекс состоит из промьгашенного робота- 1 с двумя руками, листоштамповочного пресса 2 со штампом 3, приводного стола 4, склада-накопителя 5 с автоматическим краном-штабелером 6. Приводной стол 4 снабжен поворотной платформой 7. На платформе установлены поворотные диски 8 с возможностью их дискретного поворота. Приводной стол 4 вклюает позицию I перегрузки магазинов, бращенную к перегрузочной позиции клада-накопителя, и позицию II поштучой перегрузки из магазина. Позиция II поштучной перегрузки имеет позицию На поштучной выдачи заготовок с механизмом 9 поштучной выдачи заготовок и позицию lib поштучного приема готовых изделий с механизмом 10 поштучного приема. Позиция II обращена в сторону технологического оборудования, т.е. к листоштамповочному прессу 2. Склад-накопитель 5 с автоматическим краном-штабелером 6 при- димает в свои ячейки склада как магазины 11 с заготовками, так и магазины 12 с готовыми изделиями Магазины с кассетами заготовок (готовых изделий) имеют одну пустую кассету 13. Поворотные диски 8 снабжаются элементами 14 фиксаций магазинов 11 и 12. 55
Робототехнический комплекс работает следующим образом.
Со склада-накопителя 5, где имеются магазины с кассетами заготовок и
45
50
10
g оси на
3499722
готовых изделий (фиг. 1), краном- штабелером с телескопическим столом магазин с кассетами заготовок устанавливается на поворотный диск 8 позиции I перегрузки магазинов и фиксируется злементами 14 фиксации от осевого и углового смещений. После загрузки диска 8 магазином 11 с кассетами заготовок кран-штабелер покидает позицию загрузки диска 8 для взятия другого магазина с кассетами заготовок. Приводной стол осуществляет поворот платформы 7 вокруг своей 180
20
25
30
40
. 55
, где и устанавливается магазин с кассетами заготовок на позицию II поштучной перегрузки, причем пустая кассета 13 под стопу заготовок занимает позицию lib поштучного приема готовых изделий, а позиция На поштучной выдачи изделий готова к поштучной вьщаче заготовок из кассеты (фиг. 2). При этом штоки механизмов поштучного приема готовых изделий и выдачи заготовок располагаются согласно фиг. 3.
Механизм 9 вьщачи осуществляет подъем Штока на величину толщины заготовки, шток механизма 10 приема изделий опускается на величину, равную толщине изделия. Циклы подъема штока выдачи осуществляются до тех пор, пока на щтоке есть заготовки. Когда заготовок на штоке нет, шток занимает крайнее нижнее положение (фиг. 5). Циклы опускания штока механизма приема готовых изделий осуществляется до тех пор, пока на штоке не будет полный комплект кассеты готовых изделий. Когда все кассеты в магазине заполнены готовьми изделиями, щток поштучного приема готовых изделий также занимает крайнее нижнее положение (фиг. 5).
Тем временам К1)ан-штабелер уже загрузил магазином с кассетами заготовок поворотный диск 8, находящийся на позиции I. После поворота платформы 7 на 180 и соответственно перехода магазина с кассетами заготовок на позицию II, а магазина со стопами готовых изделий на позицию I, кран-штабелер 6 забирает магазин с кассетами готовых изделий и устанавливает его в ячейку склада, затем берет магазин с кассетами заготовок и устанавливает его на поворотный диск 8 (позиция I). Далее цикл работы повторяется.
Загрузка и выгрузка штучных изделий осуществляется промьшшенным роботом 1. Одной рукой промышленный робот снимает заготовку с позиции
На иустана вливает ее в штамп, одновременно другой рукой снимает готовое изделие со штампа и укладьгоает на позицию lib . После того, как кассета, находящаяся на позиции На, полностью разгружена, а кассета, находящаяся на позиции lib , полностью э агружена, приводной стол осуществляет один дискретный поворот диска, находящегося на позиции II на вели- чину, равную расстоянию между двумя соседними кассетами, по часовой стрелке, В результате поворота магазина кассета позиции Ila опять загружена заготовками, а кассета позиции НЬ пустая.
Таким образом, осуществляется непрерывный цикл работы предлагаемого робототехнического комплекса.
Формула изобретения
Робототехнический комплекс, содержащий технологическое оборудование с оснасткой, промышленный робот с двумя руками, поворотный магазин, предназначенный для размещения нескольких равнорасположенных кассет с заготовками симметрично оси его поворота, отличающийся тем, что, с целью увеличения производи5 о
5
тельности и сокращения производственных площадей, он снабжен дополнительным магазином, приводным столом с поворотной платформой, на которой установлены симметрично оси ее поворота равнорасположенные поворотные диски для размещения соосно с осью ю поворота сменных магазинов с элементами их фиксации, а также приводом дискретного поворота дисков и механизмами поштучной вьщачи заготовок и поштучного приема готовых изделий с силовыми цилиндрами, штоки которых предназначены для взаимодействия с кассетой, при этом ось поворота диска, находящегося над механизмами поштучной выдачи заготовок и приема готовых изделий, ось вращения рук робота, ось давления оснастки расположены в одной плоскости, проходящей между штоками механизмов поштучной вьщачи заготовок и приема готовых изделий и равноудаленной от них, причем руки робота расположены друг относительно друга под углом
с/ 180 - -f.
где /3- угол, вершина которого находится на вертикальной оси вращения рук робота, а лучи угла пересекают оси штоков механизмов поштучной выдачи загото- вок и приема готовых изделий, кроме того все магазины снабжены кассетой для приема готовых изделий.
la
SB
па
Фиг.Ъ
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнический комплекс для штамповки деталей из штучных заготовок | 1987 |
|
SU1600895A1 |
| Роботизированный технологический комплекс | 1986 |
|
SU1532148A1 |
| Загрузочное устройство к роботизированному комплексу | 1986 |
|
SU1470401A1 |
| КОНТРОЛЬНО-СОРТИРОВОЧНЫЙ КОМПЛЕКС | 1990 |
|
RU2023571C1 |
| Робототехнический комплекс | 1987 |
|
SU1416244A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1984 |
|
SU1214290A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1532149A1 |
| Магазинное устройство | 1986 |
|
SU1424919A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1637909A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
Изобретение относится к области машиностроения и может быть использовано в гибких производственных системах для передачи заготовок в магазинах с автоматического склада-накопителя на рабочую позицию технологического оборудования. Целью изобретения является увеличение производительности и сокращение производственных площадей. Комплекс снабжается приводным столом 4 с поворотной платформой 7, на которой установлены два поворотных диска В с приводом диск- ретного поворота на рабочей позиции II дисков. Диски предназначены для установки на них магазинов 11, 12 с возможнос;тью их замены, а магазины имеют одну пустую кассету для приема готовых изделий. При этом при одном дискретном повороте диска кассеты перемещаются на шаг, равный расстоянию между двумя кассетами. 5 ил. to (Л G t inrn-i птр и II I I I I I I II iit|ii|iii;i tuaiuj и.11-ц fZ оо со со vl to
Фиг. 5
Составитель А. Шкуркин Редактор Н. Тупица Техред Л.Сердюкова Корректор И. Муска
Заказ 5218/14 Тираж 786Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгор(.1Д, ул. Проектная, 4
| Механизация и автоматизация производства | |||
| - М.: Машиностроение, 1985, № 5, с | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
