Изобретение относится к обогащению полезных ископаемых.
Цель изобретения - повышение точности контроля.
На чертеже представлена структурная схема системы.
Система содержит датчики 1-3 расхода руды и воды в мельницу и в классификатор, выходы которых соединены с входом вычислительного блока 4, датчик 5 давления масла в подшипниках цапфы мельницы и устройство 6 измерения содержания готового класса в сливе классификатора, выходы которых соединены с входом вычислительного блока 4. Выход блока 4 соединен с входом блока 7 управления. Выход блока 7 соединен с задающими входами блока 8 стабилизации загрузки мельницы рудой, блока 9 стабилизации расхода воды в мельницу, блока 10 стабилизации плотности на сливе классификатора. Б качестве датчика расхода руды используются электронно-гидравлические весы. Датчиком расхода воды являются диафрагмы в комплекте с дифманометрами. Датчиком давления масла является манометр, а для контроля содержания готового класса в сливе классификатора - седимен- тационный гранулометр. Для стабилизации загрузки мельницы рудой, расходов воды в мельницу и в классификатор используются типовые локальные системы. Блоки 4 и 7 реализованььс использованием микро-ЭВМ.
Вычислительный блок описывается выражением
X{k+l) A-X(k)+ B.u(k); FV-(k) + + k(k -f 1) Y(k+J) - C-AX(k)- -GBu(k)-CFV(k)l,(i;
10
15
P(k) P(k)-k(k)-C(k) P(k). (4)
Начальные условия P(ko)P(ko) - матр ица ковариации начального вектора X(ko).
Блок 7 по сигналу с выхода блока 4 рассчитывает новые значения заданий локальным системам регулирования 7-9 по формуле
U(k) -DX(k),(5)
где D - матрица коэффициентов передачи, найденная путем решения матричного уравнения Рикката (4).
Устройство работает следующим образом.
В блок 4 автоматически вводятся сигналы с датчиков 1 расходов руды, воды в мельницу 2 и в классификатор 3, а также сигналы с датчика 5 давления масла и устройства 6 измерения содержания готового класса в сливе классификатора. В блоке 4 в соответствии с уравнением (1) по измеренным сигналам, а также с использова- 20 нием предварительно введенной информации о динамических характеристиках цикла измельчения, статистике погрешностей измерения и неконтролируемых возмущений рассчитываются оценки запаса материала в мелк- нице и содержания готового класса в сливе классификатора. Эти оценки автоматически вводятся в блок 7, где в соответствии с формулой (4) рассчитываются новые значения заданий локальным системам 8-10 регулирования.
Пример. Показатели эффективности оценивания найдены путем моделирования для следующих исходных данных. Цикл измельчения, включающий в себя шаровую мельницу МШР 2700X3600, работающую в замкнутом цикле со спиральным классификато25
30
гдeX(k) (дG, Aqf- двухмерный вектор 35 оснащен датчиками расходов руды и
текущего состояния, элементами которого являются отклонения запаса материала в мельнице лО и содержания готового класса в сливе классификатора Aq от номинальных значений;
u(k) (AQ AW«, АW r--трехмерный вектор упраления, элементами которого являются приращения расходов руды в мельницу AQ, воды в мельницу AW и воды в классификатор
V(k) (Vi,V2) - двухмерный вектор неконтролируемых возмущений;
А, В, F, С - матрицы состояния, управления, возмущения и наблюдения соответственно;
k(k+l) - матрица коррекции V(k)
Y(k) (AG, Aq) - двухмерный вектор измеренных значений AG и Aq;
X(k+l) - оценка вектора X(k-t-l).
Матрицы ковариации ошибки измерений и усиления рассчитываются по следующим формулам;
P(k+l) A(k)P(k) A(k) + Q(k); (2) k(k) P(k)C-(k){C(k) P(k)-C7(k) + + R(k)l- ;(3)
воды в мельницу и в классификатор и устройством контроля содержания готового класса в сливе классификатора. Матрица состояния имеет вид
40
А
еХр(-То/Т«)еХр(-)
еХр() еХр(-1
1м1,
гдеТо - интервал дискретности; Т« , T j-время корреляции процессов G(k)
и q(k).
Матрица наблюдения имеет вид 1 О
С ;
50
О
1
55
Поскольку величина слагаемых B-u(k) и FV{k) не влияет на результаты оценки, при моделировании полагаем их равными нулю. Случайное возмущение V(k) является га- уссовским белым шумом с математическим ожиданием (k) V(k). Матрица ковариации MflV(j)-V(j)V(k)-V(k)f R(k) буь , 1,....
0
5
P(k) P(k)-k(k)-C(k) P(k). (4)
Начальные условия P(ko)P(ko) - матр ица ковариации начального вектора X(ko).
Блок 7 по сигналу с выхода блока 4 рассчитывает новые значения заданий локальным системам регулирования 7-9 по формуле
U(k) -DX(k),(5)
где D - матрица коэффициентов передачи, найденная путем решения матричного уравнения Рикката (4).
Устройство работает следующим образом.
В блок 4 автоматически вводятся сигналы с датчиков 1 расходов руды, воды в мельницу 2 и в классификатор 3, а также сигналы с датчика 5 давления масла и устройства 6 измерения содержания готового класса в сливе классификатора. В блоке 4 в соответствии с уравнением (1) по измеренным сигналам, а также с использова- 0 нием предварительно введенной информации о динамических характеристиках цикла измельчения, статистике погрешностей измерения и неконтролируемых возмущений рассчитываются оценки запаса материала в мелк- нице и содержания готового класса в сливе классификатора. Эти оценки автоматически вводятся в блок 7, где в соответствии с формулой (4) рассчитываются новые значения заданий локальным системам 8-10 регулирования.
Пример. Показатели эффективности оценивания найдены путем моделирования для следующих исходных данных. Цикл измельчения, включающий в себя шаровую мельницу МШР 2700X3600, работающую в замкнутом цикле со спиральным классификато5
0
5 оснащен датчиками расходов руды и
оснащен датчиками расходов руды и
воды в мельницу и в классификатор и устройством контроля содержания готового класса в сливе классификатора. Матрица состояния имеет вид
40
еХр(-То/Т«)еХр(-)
А
еХр() еХр(-1
1м1,
гдеТо - интервал дискретности; Т« , T j-время корреляции процессов
и q(k).
Матрица наблюдения имеет вид 1 О
С ;
О
1
Поскольку величина слагаемых B-u(k) и FV{k) не влияет на результаты оценки, при моделировании полагаем их равными нулю. Случайное возмущение V(k) является га- уссовским белым шумом с математическим ожиданием (k) V(k). Матрица ковариации MflV(j)-V(j)V(k)-V(k)f R(k) буь , 1,....
где б,-,6 - символ Кронекера;
0„, Н„,„, R
RV2V|DV2
где Dvi, D.V2 - дисперсии возмущен
V2 соответственно; Rvivj - ковариация возмущ и V2.
Dv, D,- l-eXp(-fI°); 1,2 TI Тм, Т2 Т,
Rv,,z 1 - eXp X T,(TV-TJ
X (-
т«т,
-),
где D,- - дисперсии процессов изменения запаса материала в мельнице и содержания готового класса в сливе классификатора;
Г|,2 - коэффициент корреляции запаса материала в мельнице и содержания готового класса.
Погрешность измерений запаса материала в мельнице и содержания готового класса в сливе классификатора являются гаус- совским случайным вектором с нулевым математическим ожиданием и ковариационной матрицей, где D/ - дисперсии ошибок измерения запаса материала в мельнице и содержания готового класса в сливе классификатора соответственно.
Начальные значения переменных состояния приняты равными оценками их математических ожиданий.
Начальные значения элементов матрицы P(k) приняты равными
M{vfo О
Р(0)
.
Численные значения параметров;
Q(k)
0,2с
:P(0)
О
5 Di 4,0; D2 1,0; T| 60 мин; T2 90 мин,
К„ 0,5; К, 0,1;
0„| 4,0 1-еХр(-0,166) 0,64;
0,2 1,0 1-еХр(-0,166) 0.16. 10 За единицу дисперсии ошибки оцениваемого параметра принимаем дисперсию ощибки нефильтрованного параметра. Последовательность коэффициентов в матрице коррекции и дисперсии ошибок оценивания вычисляются по уравнениям (2) и (3).
Результаты расчетов сведены в таблицу.
Из данных, приведенных в таблице, следует, что уже после проведения пяти измерений дисперсия ошибки уменьшается от 20 V4 2,0 до л/,5 1,23, т.е. значительно повышается точность контроля.
Формула изобретения
25
Система автоматического контроля параметров цикла измельчения, включающая датчики расходов руды и воды в мельницу и в классификатор, датчик давления масла в подшипниках мельницы и устройство измерения 30 содержания готового класса в сливе классификатора, отличающаяся тем, что, с целью повышения точности контроля, она снабжена вычислительным блоком и блоком управ те- ния, причем входы вычислительного блока соединены соответственно с датчиками расходов руды и воды в мельницу и в классификатор, с датчиком давления масла в подшип35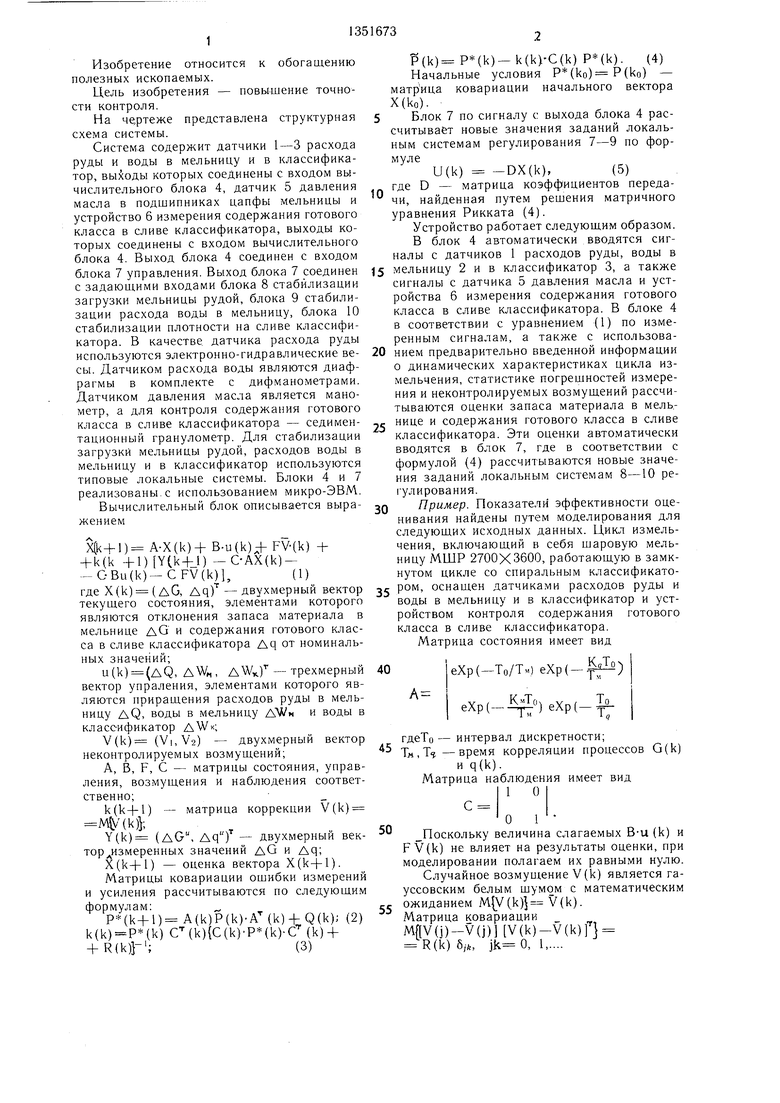

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления одностадийным циклом мокрого измельчения | 1981 |
|
SU995882A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВУХСТАДИАЛЬНЫМ ЗАМКНУТЫМ ЦИКЛОМ МОКРОГО ИЗМЕЛЬЧЕНИЯ | 2010 |
|
RU2463111C2 |
| Способ автоматического управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1414461A1 |
| Способ автоматического управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1491580A1 |
| Способ автоматического управления одностадильным циклом мокрого измельчения | 1976 |
|
SU604579A1 |
| Способ автоматического управления измельчительным агрегатом с механическим классификатором и устройство для его осуществления | 1981 |
|
SU1044330A1 |
| Способ автоматического управления двухстадийным циклом мокрого измельчения | 1981 |
|
SU1005906A1 |
| Способ управления процессом измельчения в барабанной мельнице | 1974 |
|
SU513719A1 |
| Способ автоматического управления процессом мокрого измельчения в мельнице, работающей в замкнутом цикле с классифицирующим аппаратом | 1978 |
|
SU722570A1 |
| СПОСОБ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ИЗМЕЛЬЧИТЕЛЬНЫМ АГРЕГАТОМ ЗАМКНУТОГО ЦИКЛА | 1997 |
|
RU2146175C1 |
Изобретение относится к обогащению полезных ископаемых и позволяет повысить точность контроля.Система автоматического контроля параметров цикла измельчения содержит датчики 1, 2 и 3 расхода руды, воды в мельницу и в классификатор, вычислительный блок 4, датчик 5 давления масла в цапфенных подшипниках мельницы, устройство 6 измерения содержания готового класса в сливе классификатора, блок 7 управления, блок 8 стабилизации загрузки мельницы рудой, блок 9 стабилизации расхода воды в мельницу и блок 10 стабилизации плотности на сливе классификатора. I ил. 1 табл. $ со СП 05 со
| Автоматизация управления обогатительными фабриками/Под ред | |||
| Б | |||
| Д | |||
| Кома- рского | |||
| М.: Недра, 1977, с | |||
| Прибор на велосипеде для точения | 1920 |
|
SU526A1 |
| СПОСОБ КОНТРОЛЯ РАБОТЫ МЕЛЬНИЦЫ | 0 |
|
SU400363A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
