Изобретение относится к транспортным средствам для перевозки колесных контейнеров, оснащенных погрузочно- разгрузочными устройствами.
Целью изобретения является повышение сохранности груза путем обеспечения фиксации контейнеров при транспортировке и облегчение погрузочно- разгрузочных работ.
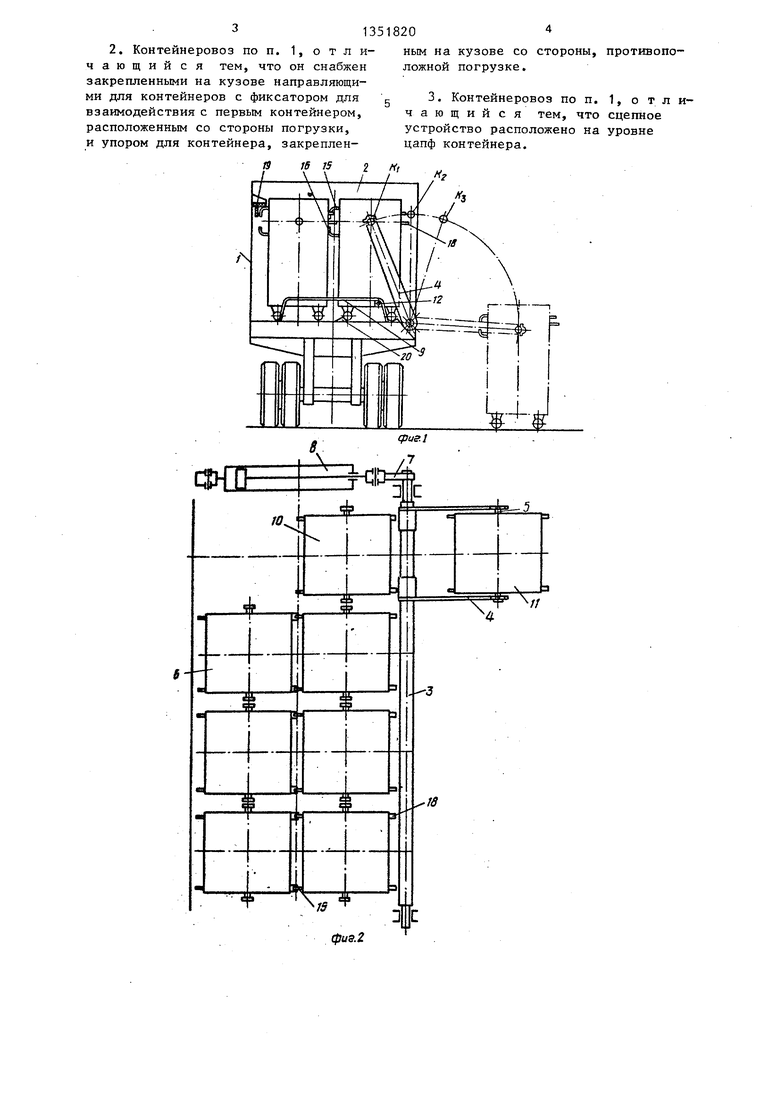
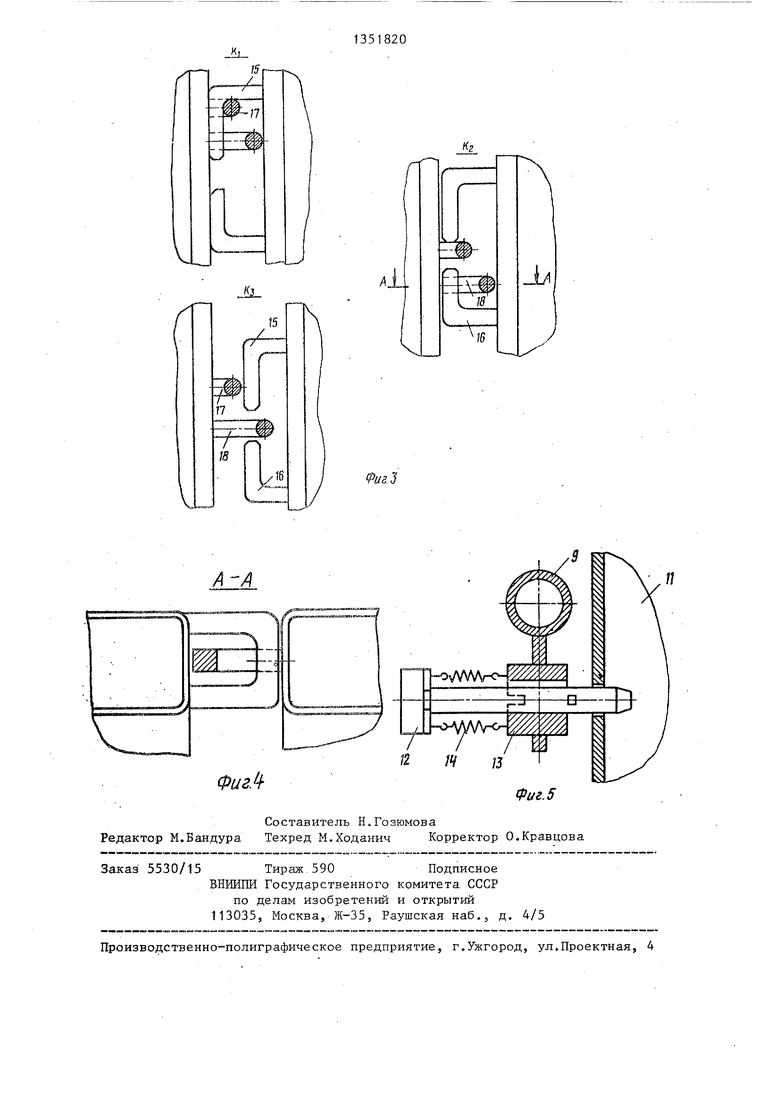
На фиг. 1 схематично изображен контейнеровоз, вид сзади; на фиг. 2 - то же, вид сверху; на фиг. 3 (К, К Kj) - положения сцепного устройства
контейнеров в процессе выгрузки; на фиг. 4 - сечение А-А на фиг. 3; на фиг.5 - фиксатор контейнера.
Контейнеровоз 1 состоит из рамы 2 закрепленного на ее боковой части вала 3 квадратного сечения, несущего грузоподъемные рычаги 4 с захватами для цапф 5 контейнеров 6. Вал 3 закреплен на раме 2 с возможностью поворота и связан с приводом, состоящим, например, из поводка 7, связанного с валом 3 и с гидроцилиндром 8 двойного действия с рабочей жидкостью от гидронасоса, соединенного, например, с двигателем транспортного средства (не показан). Грузоподъемные рычаги 4 установлены на валу 3 с возможностью поворота в вертикальной поперечной плоскости вместе с валом 3 и перемещения вдоль него.
На платформе транспортного средства установлены направляющие 9, для. контейнеров 10 и 11, на которых установлены фиксаторы 12, помещенные в направляющих втулках 13, взаимодействующих с пружиной 14. На контейнерах 10 и 11 размещено сцепное устройство, состоящее из Г-образных захватов 15 и 16, а также петель 17 и 18. Для фиксации контейнеров 10 и 11 в транспортном положении служат упоры 19 и наклонные площадки 20.
Устройство работает следующим образом.
Оператор расфиксирует контейнер 11 и, управляя с пульта управления (не показан) гидроцилиндром 8, опускает грузоподъемные рычаги 4, при этом контейнер 11 совершает движение по окружности. В этот момент захват 15 через петлю 17 перемещает контейнер 10 (точка К). При достижении грузоподъемными рычагами 4 вертикального положения (точка К захват 15 выходит из зацепления с петлей 17, а за
Q
5
5
0
5
0
хват 16 через петлю 18 начинает производить перемещение контейнера 10. После того, как контейнер 10 переместится на место контейнера 11 (точка Kj), происходит расцепление захвата 16 и петель 18, контейнер 11 опускается на площадку и производится расцепка захватов рычагов. Оператор при помощи гидроцилиндра В поднимает грузоподъемные рычаги 4 до сцепления их захватов с цапфами контейнера 10 и производит его разгрузку.
Погрузка контейнеров осуществляется следующим образом.
Вначале загружается контейнер 10, после чего оператор производит его расцепку с захватами грузоподъемных рычагов 4 и опускает последние до сцепки с контейнером 11. При соприкосновении контейнера 11 с контейнером 10 (точка Кj) происходит перемещение последнего путем взаимодействия захвата 15 и петли 17. При вертикальном положении (точка KJ) грузоподъемных рычагов 4 происходит дальнейшее перемещение контейнера 10 и сцепление захватов 15 и 16 с петлями 17 и 18. После установки контейнеров в транспортное положение (точка К ) производится фиксация контейнера 11 фиксатором 12 и контейнера 10 удором 19.
Формула изобретения
1. Контейнеровоз, содержащий шар- нирно закрепленные на боковой части рамы с возможностью поворота в верти0 кальной поперечной плоскости рычаги с захватами для контейнеров, имеющих цап(3ь1, отличающийся тем, что,с целью повышения сохранности груза путем обеспечения фиксации кон5 тейнеров при транспортировке и облегчения погрузочно-разгрузочных работ, он снабжен сцепными устройствами, каждое из которых выполнено в виде расположенных на передней стенке одного контейнера двух размещенных одно над другой горизонтальных петель и расположенных на задней стенке другого контейнера в одной вертикальной плоскости двух обращенных друг к другу Г-образных захватов для взаимодействия с петлями, причем нижняя петля смещена наружу относительно верхней на величину не меньшую, чем сумма толщины петли и Г-образного захвата.,
0
5
313
2. Контейнеровоз по п. 1, о т л и- чающийся тем, что он снабжен закрепленными на кузове направляющими для контейнеров с фиксатором для взаимодействия с первым контейнером, расположенным со стороны погрузки, и упором для контейнера, закреплен19 JS 15 2
,
фид.2
ным на кузове со стороны, противоположной погрузке.
3. Контейнеровоз по п.1, о т л и-
чающийся тем, чтосцепное
устройство расположено науровне цапф контейнера.
„
«г
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ | 1999 |
|
RU2173270C2 |
| КОНТЕЙНЕРОВОЗ | 1991 |
|
RU2022832C1 |
| Полуприцеп-контейнеровоз | 1989 |
|
SU1782807A1 |
| Транспортное средство для перевозки контейнеров | 1984 |
|
SU1184711A1 |
| Контейнеровоз | 1986 |
|
SU1418121A1 |
| КОНТЕЙНЕРОВОЗ | 2008 |
|
RU2389619C2 |
| Контейнеровоз | 1984 |
|
SU1230887A1 |
| АВТОПОЕЗД ДЛЯ ПЕРЕВОЗКИ ТЯЖЕЛОВЕСНЫХ ГРУЗОВ | 1995 |
|
RU2102269C1 |
| КОНТЕЙНЕРОВОЗ | 1995 |
|
RU2112669C1 |
| Транспортное средство для перевозки контейнеров | 1988 |
|
SU1553423A1 |
Изобретение относится к транспортным средствам для перевозки колесных контейнеров, оснащенных пргру- зочно-разгрузочными устройствами. Цель изобретения - повьшение сохранности груза путем обеспечения фиксации контейнеров при транспортировке и облегчение погрузочно-разгрузочных работ. Устройство содержит установленный на боковой части рамы вал , . квадратного сечения с приводом его поворота и з-акрепленные на валу с возможностью поворота в вертикальной поперечной плоскости и перемещения вдоль него грузоподьемные рычаги с захватами для цапф контейнера. На передней стенке одного контейнера и задней другого расположено сцепное устройство, выполненное в виде двух расположенных друг над другом горизонтальных петель и двух Г-образных захватов. При погрузке (разгрузке) контейнеров захваты поочередно взаи-. модействуют с соответствующими петлями. На платформе закреплены направляющие для контейнеров с фиксатором, взаимодействующим с первым из них. 2 3. п. ф-лы, 5 ил. i (Л 00 сд oS ю
ti.
ь
сриг.З
Фиг.
Фиг. 5
Составитель Н.Гозюмова Редактор М,Бандура. Техред М.ХоданичКорректор О.Кравцова
Заказ 5530/15Тираж 590Подписное
ВНИИГШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-355 Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул,Проектная, 4
| Устройство для погрузки и разгрузки контейнеров | 1976 |
|
SU779112A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
