13540502
Изобретение относится к транспорт-такты выключателя 12, находяп;егося в
ному маииностроению и может быть ис-исходном состоянии в разомкнутом
пользовано для определения опти-положении, и тем самым запускается
мальных углов установки управляемыхэлектроуправляемый измеритель 14 вреколес транспортных средств.мени. Одновременно в момент вхождения
Цель изобретения снижение трудо-колеса 16 в контакт с рейкой 6 на
емкости определения оптимальных угловпоследнюю начинает действовать бокосхождения управляемых колес транс-вая сила, под действием которой рейка портного средства. Ю 6 перемещается в пазу 5, замыкая
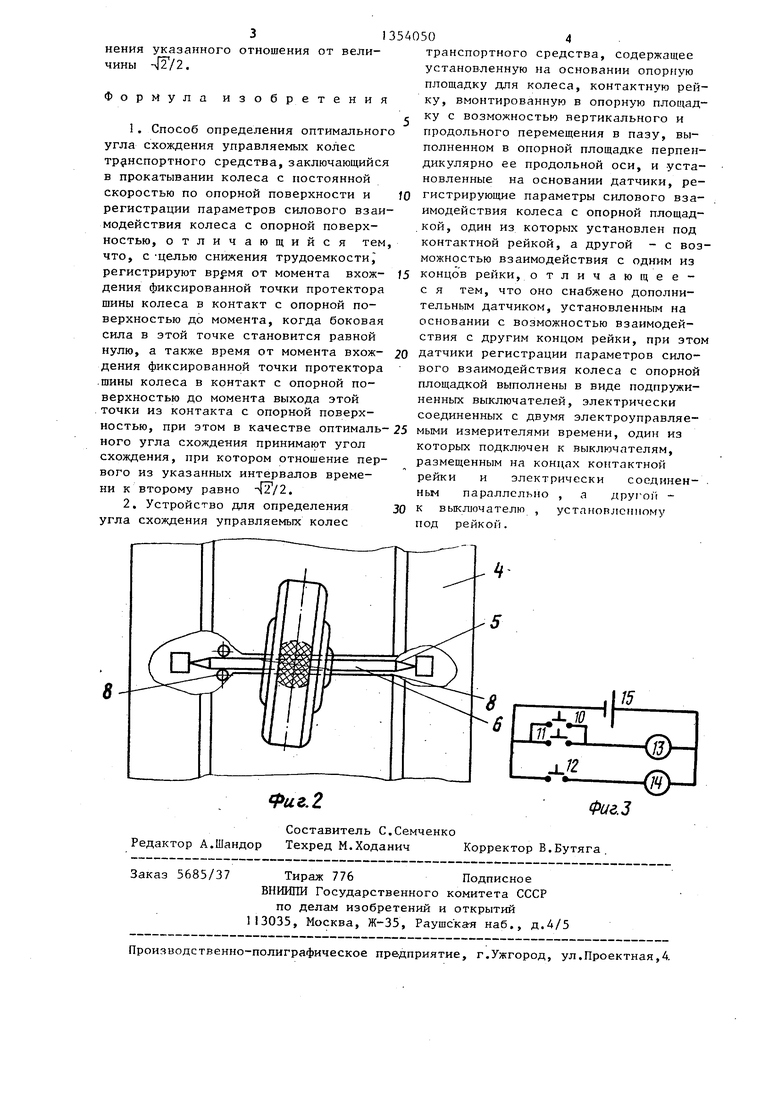
На фиг.1 представлено устройствоконтакты в зависимости от направления для реализации способа, вид спереди вдействия боковой силы одного из выклю- разрезе; на фиг.2 - то же, вид свер-чателей 10 или 11, например выключа- ху; на фиг.З - электрическая схемателя 10, запуская тем самым электроустройства;15 управляемый измеритель 13 времени.
Устройство для определения- опти-Контакты выключателей 10 и 11 в исмального угла схождения управляемыхходном состоянии также разомкнуты,
колес транспортного средства содержитПосле прохода определенного участоснование , на котором посредствомка длины пятна контакта направление
стоек 2 и 3 закреплена опорная пло-20 действия боковой силы изменится на
щадка 4, в которой выполнен паз 5пративоположное. При этом контакты
перпендикулярно продольной оси пло-выключателя 10 разомкнутся, а выклю- щадки 4, В пазу 5 установлена контакт- чателя 11 замкнутся, что приведет к
нал рейка 6, имеющая возможностьпрекращению отсчета времени измеритепродольного перемещения вдоль паза 525 лам 13, фиксирующим момент времени,
на роликах 7. От-перемещения в на-при котором боковая сила в фиксированправлении, поперечном пазу 5, кон-ной точке протектора шины колеса 16
тактная рейка 6 удерживается направ-становится равной нулю. Измеритель 13
ляющими роликами 8« Контактная рейкавремени останавливается при размыка6 с помощью пружин 9 подпружиненаЗО нии включившего его контакта, так как
относительно основания 1 ,, чем обеспе-имеет-в своем составе устройство,
чивается ее вертикальное перемещение.блокирующее повторный его запуск до
По обоим концам контактной рейкисброса показаний после окончания из6 на основании 1 установлены выключа-мерений.
тели 10 и 11, электрически соединен-og Отсчет времени измерителем 14 вреные параллельно, а под контактноймени будет продолжаться до тех пор,
рейкой 6 установлен выключатель 12.пока после прохождения через рейку 6
Выключатели 10 - 12 соединены с элек-фиксированной точки протектора щины
троуправляемыми измерителями 13 и 14колеса 16, т.е. всей длины пятна
времени и источником 15 напряжения.40 контакта, рейка 6 под действием пруВыключатели 10 - 12 имеют два фикси-жин 9 не переместится вверх, размыкая
рованных положения: в первом поло-контакты выключателя 12 и останавлижении под действием размещенных в нихвая тем самым отсчет времени измерипружин.(не показано) контакты вы-телем 14 времени, фиксирующим момент
ключателей разомкнуты, а при нажатии45 выхода фиксированной точки протектора
на выключатели пружины сжимаются ишины колеса 16 из контакта с опорной
контакты выключателей замыкаются.площадкой 4.
Управляемое колесо 16 установлено наДалее определяют отношение показаопорной площадке 4.ний, зарегистрированных измерителем
Способ определения оптимальногоgQ 13 времени, к показаниям измерителя
угла схождения управляемых колес14 времени, т.е. производят оценку .
транспортного средства осуществляетсяоптимальности установленного угла
следующим образом, схождения. Если найденное отногаение
При проезде исследуемого управляв-оказывается равным величине л/2/2,
мого колеса i 6 d установленным углом с то установленный угол схождения счисхождения по опорной площадке 4 втается оптимальным, если же оно отлимомент вхождения фиксированной точкичается от 42/2, то посредством регупротектора шины колеса 6 в контактлировки изменяют угол схождений на
с контактной рейкой 6 замыкаются кон-величину, зависящую от степени отклонения указанного отношения от величины ,
Формула изобретения
1. Способ определения оптимальног угла схождения управляемых колес транспортного средства, заключающийся в прокатывании колеса с постоянной скоростью по опорной поверхности и регистрации параметров силового взаимодействия колеса с опорной поверхностью, отличающийся тем что, с -целью снижения трудоемкости регистрируют вррмя от момента вхож- дения фиксированной точки протектора шины колеса в контакт с опорной поверхностью до момента, когда боковая сила в этой точке становится равной нулю, а также время от момента вхож- дения фиксированной точки протектора .шины колеса в контакт с опорной поверхностью до момента выхода этой точки из контакта с опорной поверхностью, при этом в качестве оптималь- 25 мыми измерителями времени, один из ного угла схождения принимают угол которых подключен к выключателям, схождения, при котором отношение первого из указанных интервалов времени к второму равно 47/2.
2, Устройство для определения jO угла схождения управляемых колес
размещенным на концах контактной рейки и электрически соедине ный параллельно , а другоГ - к выключателю , установленному под рейкой.
транспортного средства, содержащее установленную на основании опорную площадку для колеса, контактную рейку, вмонтированную в опорную площадку с возможностью вертикального и продольного перемещения в пазу, выполненном в опорной площадке перпендикулярно ее продольной оси, и установленные на основании датчики, регистрирующие параметры силового взаимодействия колеса с опорной площадкой, один из которых установлен под контактной рейкой, а другой - с возможностью взаимодействия с одним из концов рейки, отличаю щее- с я тем, что оно снабжено дополнительным датчиком, установленным на основании с возможностью взаимодействия с другим концом рейки, при это датчики регистрации параметров силового взаимодействия колеса с опорной площадкой выполнены в виде подпружиненных выключателей, электрически соединенных с двумя электроуправляемыми измерителями времени, один из которых подключен к выключателям,
размещенным на концах контактной рейки и электрически соединенный параллельно , а другоГ - к выключателю , установленному под рейкой.
Фиг.2
Фиг.З
Редактор А.Шандор
Составитель С.Семченко
Техред М.Ходанич Корректор В.Бутяга.
5685/37
Тираж 776Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушска-я наб,, д.Д/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4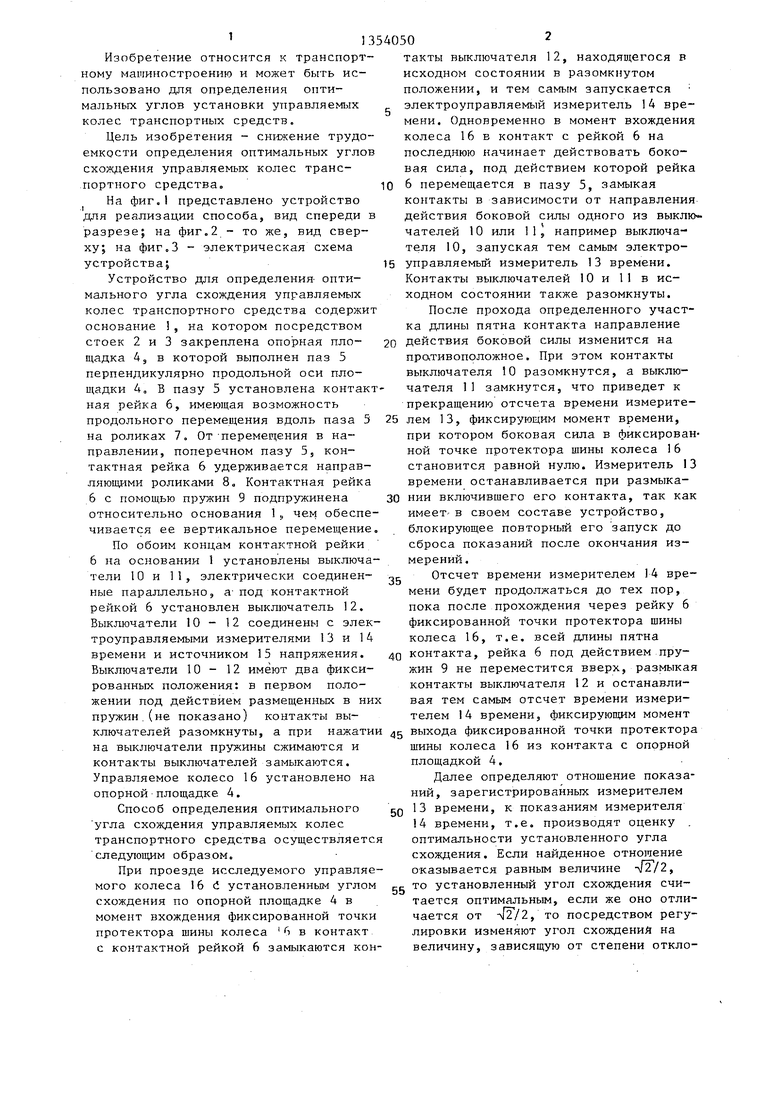
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения угла схождения управляемых колес транспортного средства | 1990 |
|
SU1693428A1 |
| Устройство для определения угла схождения управляемых колес транспортного средства | 1990 |
|
SU1693429A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДЛИНЫ И УГЛА КОНТАКТА ШИНЫ | 2008 |
|
RU2384830C2 |
| Стенд для контроля углов установки управляемых колес транспортного средства | 1983 |
|
SU1112256A1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| СПОСОБ ЭКСПРЕСС-ДИАГНОСТИКИ УГЛОВ УСТАНОВКИ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2293963C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ УСТАНОВКИ КОЛЕС АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2033602C1 |
| Способ диагностирования углов установки управляемых колес транспортных средств | 1980 |
|
SU901884A1 |
| Стенд для определения схождения управляемых колес транспортного средства | 1988 |
|
SU1580212A2 |
| ПОСТ КОМПЛЕКСНОЙ ДИАГНОСТИКИ АВТОМОБИЛЕЙ | 2022 |
|
RU2788234C1 |
Изобретение относится к транспортному машиностроению. Цель - снижение трудоемкости при определении оптимального угла схождения управля- емьк колес транспортного средства. Способ определения оптимального угла схождения основан на регистрации двух параметров силового взаимодействия колеса с опорной поверхностью по длине пятна контакта : времени от момента вхождения фиксированной точки протектоffff fff /f ff/7f//, Т 3 Фиг ра шины колеса в контакт с опорной поверхностью до момента выхода этой точки из контакта с опорной поверхностью и времени от первого из названных моментов до момента, когда боковая сила в указанной точке равна нулю. При этом в качестве оптималь- ного угла схождения-принимают угол схождения, при котором отношение второго из указанных интервалов времени к первому равно л1272. Устройство для реализации способа содержит подпружиненные выключатели 10,11,12, установленные на основании 1 опорной площадки 4 под контактной рейкой 6 и у ее концов и электрически соединенные с двумя электроуправляемымгГ измерителями времени, один из которых подключен к выключателям, установленным на концах рейки и электрически соединенным параллельно, а другой - к выключателю, расположенному под рейкой. Описанный способ и устройство позволяют снизить трудоемкость за счет осуществления замеров только двух параметров по дпийе пятна к;он- такта. 2 с.п.Л-лы, 3 ил. IS (Л со ел о СП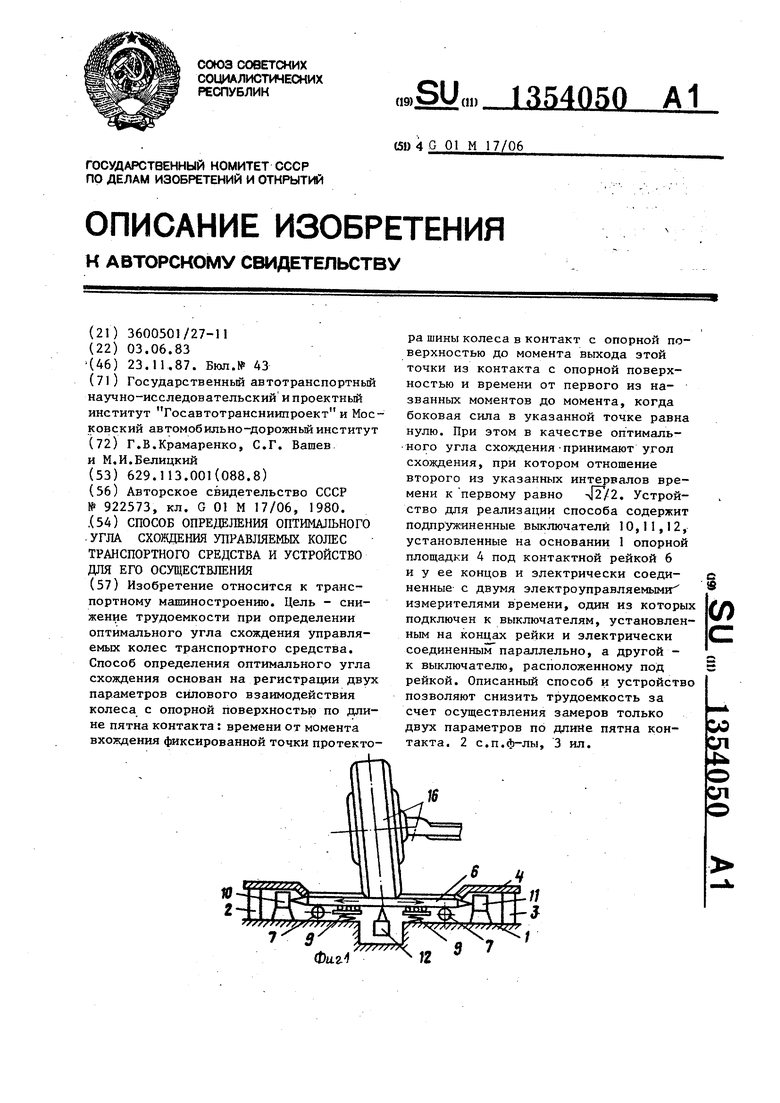
| Способ установки оптимального угла схождения управляемых колес транспортных средств | 1980 |
|
SU922573A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
