Изобретение относится к машиностроению, преимущественно к системам в меха- нообрабатывающем, сборочном и т. п. производствах.
Целью изобретения является расширение технологических возможностей за счет увеличения числа возможных транспортных путей для загрузки станков.
На фиг. 1 показана гибкая производ- Q дения под тару вилочного захвата. После
этого осуществляется поворрт стола (для установки тары на тележку - поворот на 90°; для размещения тары в зоне станочного манипулятора - на 180°). По за- Гибкая производственная система вклю-вершении фиксированного поворота стол 7
чает в себя переналаживаемые станки 1 с 15 опускается и тара (при повороте на 90°)
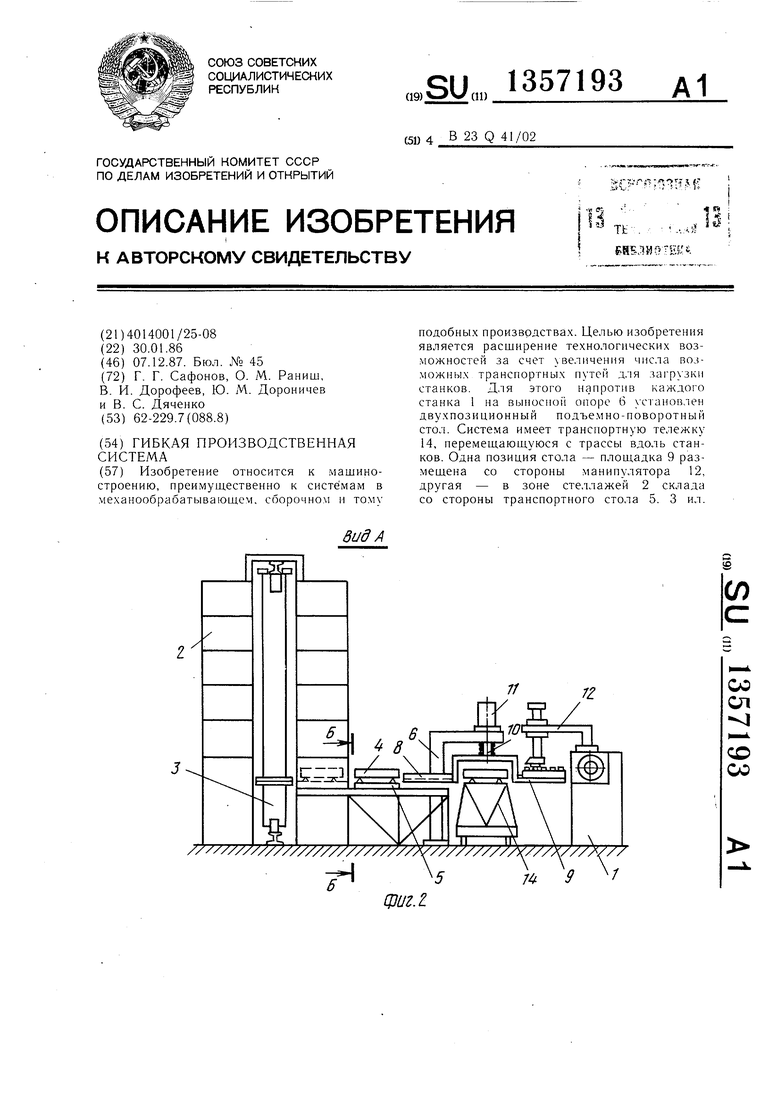
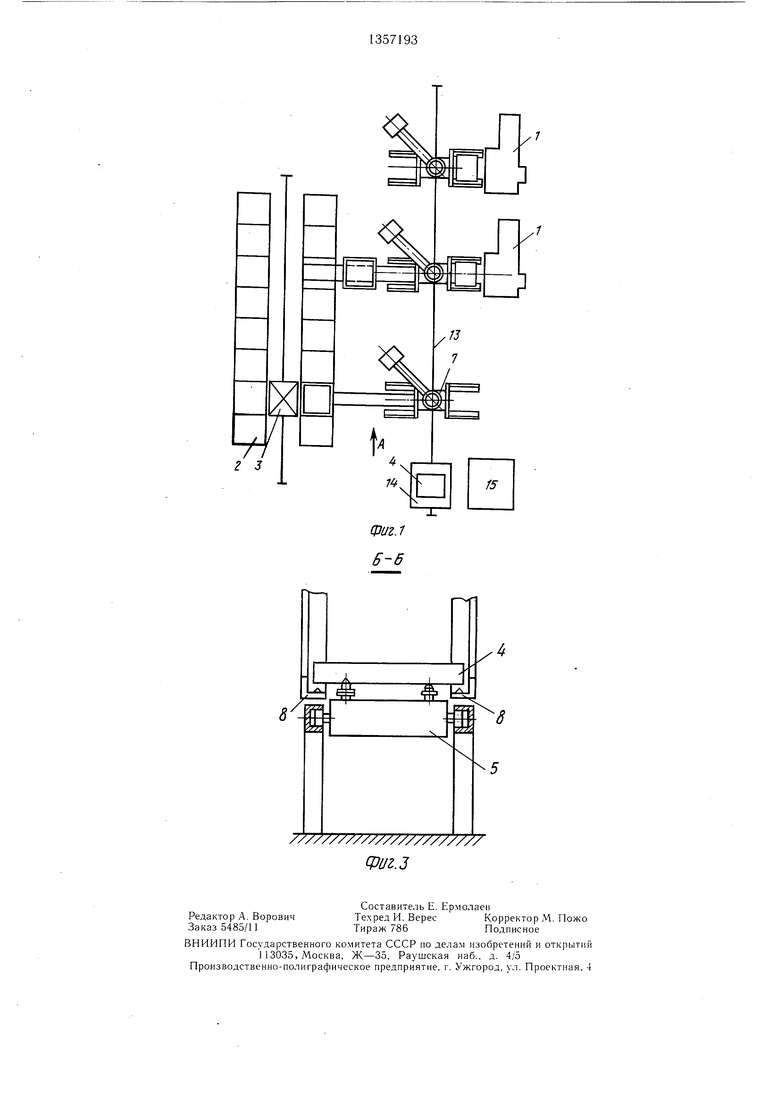
ственная система, вид в плане; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.
ЧПУ, стеллажи 2 склада с роботом-щта- белером 3. Последний размещен между двумя рядами стеллажей 2 с возможностью передвижения вдоль стеллажей и подъема - опускания тары 4. Система имеет механизм перемещения тары с транспортными столами 5 для перемещения тары от стеллажей в сторону станков. Напротив каждого станка 1 системы на выносной опоре 6 размещены двухпозиционные подъем20
устанавливается за счет вилочных захватов на предварительно поданную под стол 7 тележку 14, а при повороте на 180° тара находится в зоне работы манипулятора 12, и в этом случае двухпозиционный сто л используется в качестве промежуточной позиции для станка. На тележке 14 тара 4 доставляется к станкам, расположенным вне пределов стеллажей, и принимается посредством вилочного захвата соответствуюно-поворотные столы 7. Каждый стол 7 25 подъемным и поворотным столом 7,
имеет две площадки: одну площадку 8 со стороны стеллажей, другую площадку 9 - со стороны станков 1. Стол имеет П-образную форму и в верхней центральной части закреплен на валу 10 механизма 11 подъема и поворота, установленного на выносной опоре 6. Площадка 9 двухпозицион- ного стола 7 размещена с возможностью приема с нее устройством передачи на станок, выполненным в виде манипулятора 12, деталей из многоместной тары. Вдоль
после чего последний поворачивается на 90° для переноса тары 4 в зону манипулятора 12 и затем площадка опускается до исходного положения. Далее тележка следует за следующей тарой. 30 Цикл повторяется.
Формула изобретения
Гибкая производственная система, содержащая станки с ЧПУ, склад с роботомстанков 1 проходит трасса 13 для тележ- 35 штабелером, транспортную тележку, мехаки 14, кроме того, в зоне поворотных столов трасса проходит под валом 10 механизма 11 подъема и поворота стола 7, т. е. тележка 14 имеет возможность проходить под столом 7. Площадки 8 и 9 двухпозиционного поворотного и подъемного стола 7 выпонены в виде вилочных захватов. В системе имеется также участок комплектации 15.
Гибкая производственная система работает следующим образом.
Робот-щтабелер 3 со стеллажей 2 вынимает тару 4 и перемешает ее к транспорт40
низм перемещения тары со склада на тележку, устройство передачи деталей на станок, отличающаяся тем, что, с целью расширения технологических возможностей, она снабжена закрепленными на выносной опоре двухпозиционными подъемно-поворотными столами, установленными с воз- можностью прохода под ними транспортной тележки, при этом подъемно-поворотные столы расположены с возможностью 45 поочередного взаимодействия с механизмом перемещения тары, транспортной тележкой и устройством передачи деталей на станок.
ному столу 5. После установки тары 4 на стол 5 последний транспортирует ее в сторону соответствующего станка 1 к находящемуся в исходном положении соответствующему подъемнику и поворотному двухпози- ционному столу 7 до крайнего положения. После установки стола 5 площадка 8 стола 7 перегружает на себя тару посредством подъема самого стола 7 за счет вхож
устанавливается за счет вилочных захватов на предварительно поданную под стол 7 тележку 14, а при повороте на 180° тара находится в зоне работы манипулятора 12, и в этом случае двухпозиционный сто л используется в качестве промежуточной позиции для станка. На тележке 14 тара 4 доставляется к станкам, расположенным вне пределов стеллажей, и принимается посредством вилочного захвата соответствую подъемным и поворотным столом 7,
после чего последний поворачивается на 90° для переноса тары 4 в зону манипулятора 12 и затем площадка опускается до исходного положения. Далее тележка следует за следующей тарой. Цикл повторяется.
Формула изобретения
Гибкая производственная система, содержащая станки с ЧПУ, склад с роботомштабелером, транспортную тележку, меха
низм перемещения тары со склада на тележку, устройство передачи деталей на станок, отличающаяся тем, что, с целью расширения технологических возможностей, она снабжена закрепленными на выносной опоре двухпозиционными подъемно-поворотными столами, установленными с воз- можностью прохода под ними транспортной тележки, при этом подъемно-поворотные столы расположены с возможностью поочередного взаимодействия с механизмом перемещения тары, транспортной тележкой и устройством передачи деталей на станок.
2 3
/
//////////////////////// Фи1.3
Редактор А. Ворович Заказ 5485/11
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, , Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг.1 6-6
S
Составитель Е. Ермолаев Техред И. ВересКорректор М. Пожо
Тираж 786Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкая производственная система | 1989 |
|
SU1620273A2 |
| Гибкая производственная система | 1987 |
|
SU1491663A1 |
| Поточная линия | 1981 |
|
SU959983A1 |
| Поточная линия | 1984 |
|
SU1212761A1 |
| Автоматизированный участок механической обработки деталей | 1980 |
|
SU921790A1 |
| Приемо-передаточное устройство и транспортно-накопительная система поточной линии | 1983 |
|
SU1180232A1 |
| Автоматизированный участок | 1983 |
|
SU1183351A1 |
| Устройство для перегрузки затаренных грузов | 1986 |
|
SU1359222A1 |
| Гибкий производственный модуль | 1986 |
|
SU1342668A1 |
| Гибкая производственная система | 1988 |
|
SU1743802A1 |
Изобретение относится к машиностроению, преимущественно к системам в механообрабатывающем. сборочном и то.му нодобны.х производствах. Целью изобретения является расширение технологических возможностей за счет увеличения числа воз- можны.х транспортных путей для загрузки станков. Для этого напротив каждого станка 1 на sbmocHoii опоре 6 установлен двухпозиционный подъемно-поворотный стол. Система имеет транспортную тележку 14, неремеш,аюшуюся с трассы вдоль станков. Одна позиция стола - плош.адка 9 размещена со стороны манипулятора 12, другая - в зоне стеллажей 2 склада со стороны транспортного стола 5. 3 ил. ////////////////Л(////////// /// //// // фиг 2 /У/// / 1 V V ел оо ел со 00 /У/// / 1 V V