Изобретение относится к машиностроению, в частности к способам транспортировки грузов.
Целью изобретения является повышение эффективности использования транспортных средств.
Способ может быть реализован при помощи различных захватных органов: магнитных, электромагнитных и вакуумных.
На чертеже показано устройство с вакуумными захватными органами. Устройство содерямт траверсу 1 грузоподъемного механизма, источник 2 вакуума, вакуумные присосы 3 и 4. группу эластичных присосньк манжет 5-8, 9, сообщающие соответствующие присосы с источником вакуума и атмосферой. Детали обозначены нозициями 10-12.
Устройство работает следующим образом.
В исходном положении присосные манжеты 5-8 механизмом их перемещения (не показан) .удерживаются в полжении над траверсой 1 вне зоны действия вакуумных присосов 3 и 4. Все вентили 9 закрыты.
Для подъема и транспортировки грузов вакуумные присосы 3 и 4 устанавливают на поверхности детали 10, подлежащей транспортированию, и сообщают камеры А и Б, образованные присосами и деталью, С источником вакуума. Производят подъем детали 10. В том случае, когда масса груза меньше удерживающей способности при сосов 3 и 4, о чем судят по показатлям соответствующих (известных в т
Редактор А. Ворович
Составитель С. Грибов Техред л.Сердюкова
Заказ 5931/13 Тираж 952
ВНИИПИ Государственного комитета СССР
. по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
.Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
нике) датчиков, под деталь 10 вводят присосные манжеты 5 и 6 и опускают траверсу 1 с деталью 10 на манжеты
5 и 6, производят вакуума.цию камер В и Г, образованных деталью 10, манг жетами 5 и 6 и деталью 11, и производят подъем. При необходимости приемы повторяют для подъема детали 12, для
чего вводят в работу манжеты 7 и 8 и вакуумируют камеры Д и Е. При полной загрузке устройство с деталями транспортируют к месту назначения, где траверсу 1 опускают, камеры Д
и Е разобщают с источником 2 вакуума и сообщают их с атмосферой. После подъема траверсы с деталя ш 10 и 11 манжеты 7 и 8 выводят в исходное положение. Приемы повторяют до полной
разгрузки.
Использование предлагаемого способа в условиях промьшшенных предприя- тий позволяет осуществлять различные комбинации захвата деталей путем соответствующего размещения захватньк органов между деталями, в результате чего обеспечивается значительное сокращение транспортных издержек.
Формула изобретения
Способ захвата и транспортирования грузов, заключающийся в размещении захватных органов на детали, ее захвате и транспортировании, отличающийся тем, что, с целью повьшения эффективности транспортных средств, захватные органы чередуют при операции захвата с дет Корректор А.Обручар Подписное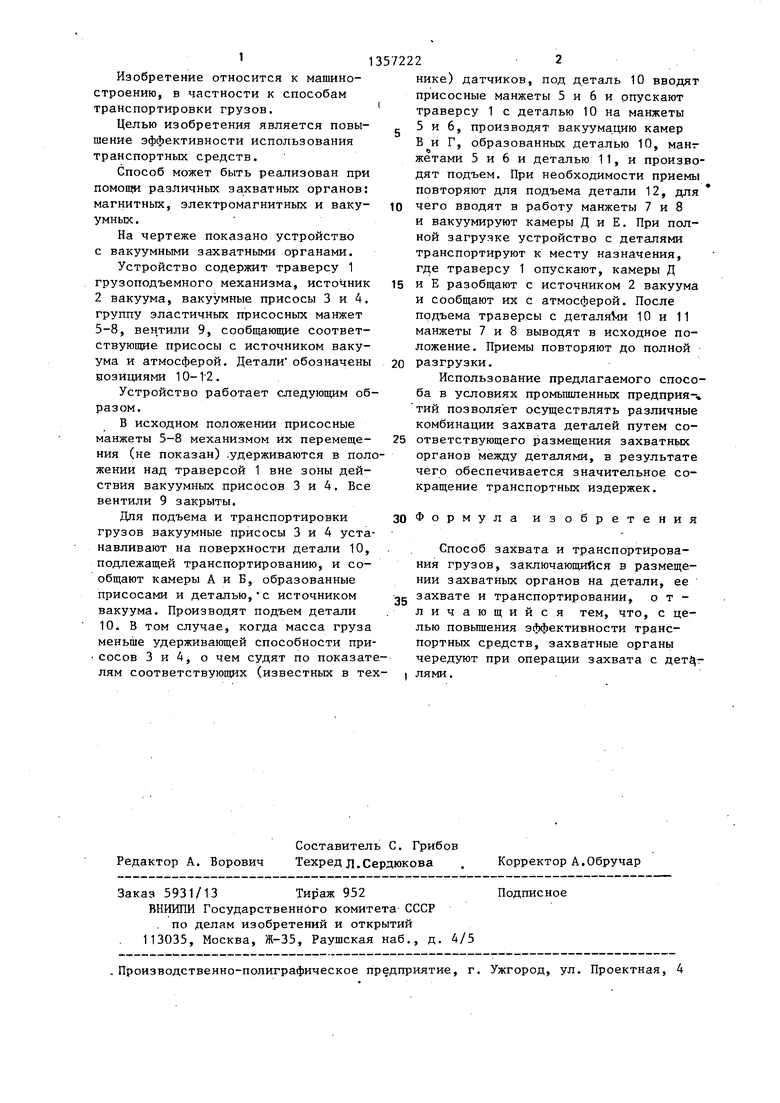
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1986 |
|
SU1393635A1 |
| Вакуумный захват | 1983 |
|
SU1113352A1 |
| Вакуумное захватное устройство | 1980 |
|
SU925836A1 |
| Вакуумное захватное устройство | 1981 |
|
SU1036657A1 |
| Вакуумное захватное устройство | 1979 |
|
SU846480A1 |
| Вакуумное грузозахватное устройство | 1983 |
|
SU1209560A1 |
| Вакуумное грузозахватное устройство | 1985 |
|
SU1252282A1 |
| Вакуумное грузозахватное устройство | 1986 |
|
SU1373667A1 |
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| Вакуумный захват | 1985 |
|
SU1281497A1 |
Изобретение относится к области машиностроения, в частности к способам транспортировки грузов. Целью изобретения является повьппение эффективности использования транспортных средств. Для этого при операции захвата детали 10,11,12 укладывают, чередуя с захватными органами 5,6, 7,8. Это позволяет максимально загрузить транспортное средство. 1 ил. 2-i СА:) СЛ ND ЬО to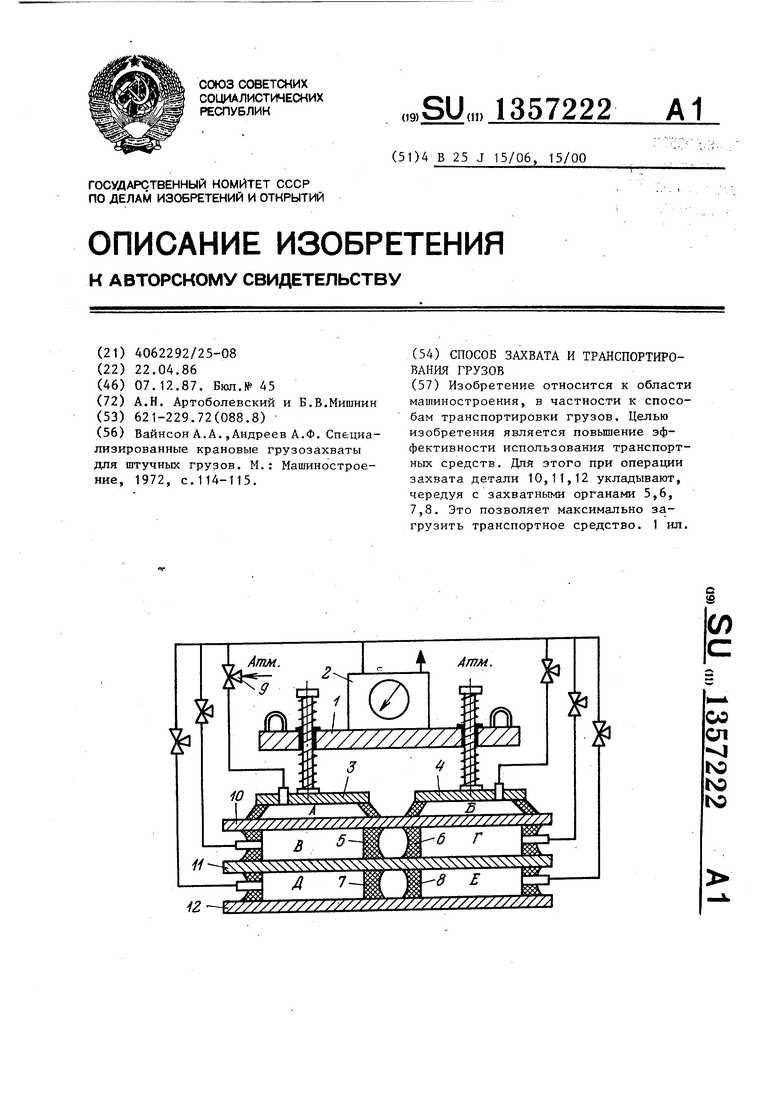
| Вайнсон А.А | |||
| ,Андреев А.Ф | |||
| Специализированные крановые грузозахваты для штучных грузов | |||
| М.: Машиностроение, 1972, с.114-115. |
