1
Изобретение относится к машиностроению, а именно к устройствам для п&редачи заготовок, примененным в робототехнических комплексах, в сое- р- тав которых входят промышленные роботы с накопителями заготовок.
Целью изобретения является повышение надежности и расширение технологических возможностей путем исклю- io чения переналадки захвата и ложементов накопителя под другой типоразмер заготовки.
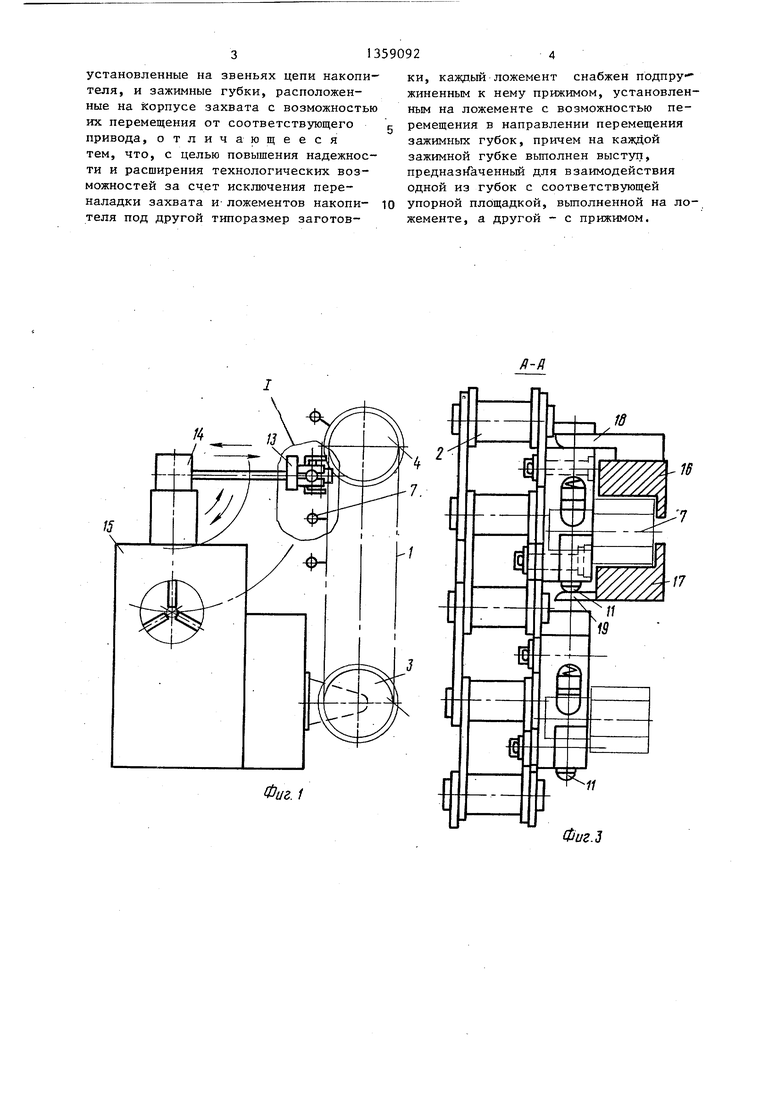
На фиг,1 изображено устройство, общий вид; на фиг.2 - узел-I на 15 фиг.1; на фиг.З - разрез А-Л на фиг.2; на фиг.4 - губки для захвата заготовок за внутреннюю поверхность; на фиг.З - разрез Б-Б на фиг.4.
Устройство содержит накопитель 1 20 элеваторного типа, имеющий втулочно- роликовзпо цепь 2, надетую на приводную 3 и ведомую 4 звездочки. Ложементы 5 базовыми призматическими поверхностями 6 для укладки заготовок 7 25 расположены на осях 8, установленных между пластинами 9 звеньев цепи 2. Каждый ложемент имеет прижим 10 с направляющим ползуном 11, находящимся под действием пружины сжатия )2. 30 Захват 13 манипулятора 14, размещенного на шпиндельной бабке 15 металлорежущего станка (не показан), снабжен двумя подвижными приводными зажимными губками 16 и 17, имеющими gg выступы 18 и 19. Для захвата заготовок за внутреннюю поверхность вместо губок 18 и 19 применяют губки 20 и 21 с выступами 22 и 23. Концы губок, несущие упоры, перекрещены. 40
, Устройство работает следующим образом.
При настройке захват 13 ориентируют относительно накопителя 1 так, что ось симметрии губок 16 и 17 или 45 20 и 21 совпадает с осью заготовки максимального диаметра (из группы заготовок разных номинальных диаметров), находящейся на базовых поверхностях 6 ложемента 5 в зоне загруз- 50 ки. В исходном положении захвата 13 соосно шпинделю станка губки 16 и 17 или 20 и 21 соответственно разведены или сведены, заготовка находится под прижимом 10 на ложементе в 55 зоне загрузки (захвата).По команде от задающего (программного) устройства (не показано) манипулятор 14 поворачивается и вьщвигает руку, устанавли13590922
вая зев губок 16 и 17 соосно заготовке 7, после чего перемещает захват вдоль оси заготовки, пока последняя не окажется между губками.16 и 17, выступы 18 и 19 которых в этом положении ни с ложементом 5, ни с ползуном 11 не контактируют. При сведении губок 16 и 17 выступ 18 встречает ложемент 5 и опирается на его упорную площадку, а выступ 19 нажимает на ползун 11, поднимая прижим ГО и освобождая заготовку 7. При дальнейшем движении губки 17 относительно ложемента она приподнимает заготовку над базовыми поверхностями 6 и заготовка перестает контактировать с ложементом, после чего губки б и 17 зажимают заготовку 7. Затем манипулятор 14 сообщает захвату движение вдоль оси ложемента 5, выводя из него заготовку. При этом выступ 18 скользит по ложементу, а выступ 19 - по ползуну 11, продолжая удерживать прижим 10 и давая возможность заготовке свободно выйти из ложемента 5, после чего контакт выступов 18 и 19 с ложементом и пальцем также прекращается. Пружина 12 опускает прижим 10. Манипулятор вводит заготовку в патрон станка и возвращает захват в исходное положение. Приводная звездочка 3 перемещает цепь 2 на один шаг, подавая в зону загрузки следующую заготовку. В случае применения губок 20 и 21 после введения из базирующих выступов заготовки губки расходятся, выступ 22 приходит в контакт с ложементом, выступ 23 нажимает на ползун 11, освобождая заготовку от действия прижима 10, губка 21 приподнимает заготовку над ложементом и при дальнейшем движении зажимает ее совместно с губкой 20. При выведении заготовки из ложемента по нему скользит выступ 22, а по ползуну 11 - выступ 23. В остальном работа происходит так, как с губками 16 и 17. Базирование губки с помощью упора на ложемент обеспечивает постоянное положение захвата относительно ложемента и возможность захвата заготовки предельных диаметров.
Формула изобретения
Устройство для передачи заготовок из накопителя в захват манипулятора, содержащее ложементы под заготовки.
установленные на звеньях цепи накопителя, и зажимные губки, расположенные на корпусе захвата с возможностью их перемещения от соответствующего привода, отличающееся тем, что, с целью повышения надежности и расширения технологических возможностей за счет исключения переналадки захвата и- ложементов накопи- теля под другой типоразмер заготовки, каждый ложемент снабжен подпру жиненным к нему прижимом, установленным на ложементе с возможностью перемещения в направлении перемещения зажимных губок, причем на каждой зажимной губке выполнен выступ, предназьГаченньй для взаимодействия одной из губок с соответствующей упорной плбщадкой, выполненной на ложементе, а другой - с прижимом.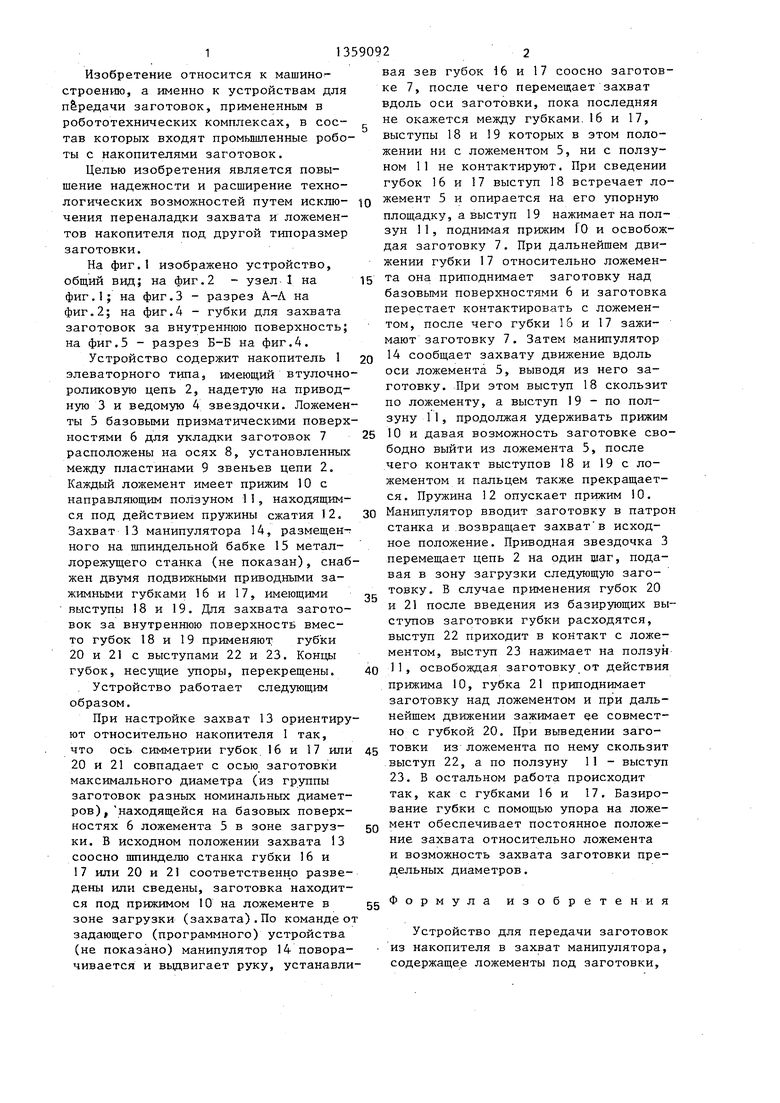
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный автоматический станок вертикального типа для расточки отверстий в платинах часов | 1961 |
|
SU150735A1 |
| Захват | 1984 |
|
SU1222540A1 |
| Автоматическая линия штамповки поворотных кулаков | 1987 |
|
SU1466868A1 |
| Способ установки ступенчатого вала в механизированное приспособление станка | 2023 |
|
RU2811773C1 |
| Устройство для подачи и зажима заготовок | 1987 |
|
SU1454646A1 |
| Устройство для ротационного выдавливания | 1983 |
|
SU1100027A1 |
| Схват | 1986 |
|
SU1390021A1 |
| Устройство для подачи длинномерного фасонного проката в зону обработки | 1987 |
|
SU1493401A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Автоматизированный технологический комплекс | 1985 |
|
SU1349969A1 |
Изобретение относится к машиностроению, а именно к устройствам для передачи заготовок в робототехничес- ких комплексах с накопителями заготовок . Цель изобретения - повышение надежности и расширение технологических возможностей. В устройстве для передачи заготовок из накопителя в захватное устройство манипулятора при извлечении заготовки 7 из ложе- (тентов 5 накопителя зажимные губки 16 и 17 захвата взаимодействуют своими выступами 18 и 19 с ложементом 5 и ползуном 11, при этом прижим 10, связанный с ползуном 11, освоболодает заготовку. Дальнейшим перемещением губок 16 и 17 заготовка 7 зажимается в захвате и извлекается манипулятором из накопителя. 5 ил. О) со ел СО о QO ГчЭ
Фиг.З
/J
22
Редактор М.Келемеш
(pLie.S
Составитель Е.Ермолаев
Техред М.Ходанич; . Корректор С.Шекмар
Заказ 6104/15Тираж 786Подписиое
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| ПЕРЕНАЛАЖИВАЕМОЕ УСТРОЙСТВО С ПРОГРАММНЫМ УПРАВЛЕНИЕМ ДЛЯ ТРАНСПОРТИРОВКИ И ПЕРЕГРУЗКИЗАГОТОВОК | 0 |
|
SU246290A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
