принимается равным максимальному радиусу обрабатываемых бревен. При окорке бревен меньших диаметров зона взаимодействия РО с новерхностью бревна увеличивается за счет нрижима РО и их раз
1
Изобретение относится к лесной и деревообрабатывающей промышленности и может быть использовано при окорке бревен различных диаметров независимо от породы древесины и ее физического состояния,
Целью изобретения является повышение качества и производительности.
На фиг. 1 показан станок, вид сбоку; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - вид В на фиг. 3.
Окорочный станок содержит раму 1, на которой смонтирован механизм 2 подачи, приводные верхний 3, нижний 4 и боковые 5 и 6 рабочие органы, выполненные в виде ш,еток и размеш,енные на ва- лах 7-10 поочередно и последовательно вдоль продольной оси О-О станка, и механизм прижима рабочих органов для образования замкнутого режушего органа. Механизм прижима верхнего 3 и боковых 5 и 6 рабочих органов выполнен в виде гидроцилиндров 11, 12 и 13, шток 14 которого соединен с соответствуюплими валами посредством кинематической пары винт - гайка для разворота валов на требуемый угол относительно продольной оси О-0. В механизме прижима верхнего 3 рабочего органа гайка 15 закреплена на раме 1, а винт 16 связан со штоком 14. В механизмах прижима боковых 5 и 6 рабочих оргапов винты 17 закреплены на раме 1, а гайка 18 - на подшипниковых опорах 19 валов 9 и 10. Нижний 4 и верхний 3 рабочие органы связаны между собой синхронизирующим устройством, выполненным в виде сельсин-датчика 20 и сель- си приемника 21, причем сельсин-датчик 20 кинематически связан с валом 7 верхнего рабочего органа, а сельсин-приемник 21 - с валом 10 нижнего. Каждый из валов 7 и 8 закреплен на державках 22 и 23, имеющих на своих консолях 24 приводы 25. Вращение валов 9 и 10 осуществляется от приводов 26.
Окорочный станок работает следуюпшм образом.
Бревно 27, перемещаемое приводом 2, подается в станок. Перед станком устанавливается устройство измерения диаметров (не показано), сигнал с которого поступает на механизмы управления гидро
ворота на определенный угол. За счет этого обеспечивается максимальный охват поверхности бревна РО, что ведет к повышению качества и производительности. 4 ил.
0 0
5
0
цилиндрами 11, 12 ,и 13. Перемещение штока 14 гидроцилиндра 11 передает поступательное движение винту 16, который взаи.модействуя с гайкой 15, начинает поворачиваться, вызывая поворот рабочего органа 3 в зависимости от диаметра бревна 27. Державка 23 нижнего 4 рабочего органа совершает только вращательное движение, которое передается с верхнего рабочего органа через кинематическую связь системы синхронизации, включающего в себя ведущую шестерню 28 на валу 16 и ведомую 29 на валу 30, к которому подключен сельсин-датчик 20. При поступательно-вращательном перемещении винта 16 щестерня 28 поворачивается на онределен- ный угол, который примет верхняя шестерня 29, а так как она через вал 30 соединена с сельсин-датчиком 20, то данный сигнал передается в сельсин-приемник 21, закрепленный на выходном валу 31 державки 23, в результате чего нижний рабочий орган повернется на заданный угол в опоре 32 вращения. Радиус кривизны рабочих органов принимается равным максимальному радиусу боковой поверхности бревен. При окорке бревен меньших диаметров зона взаимодействия рабочих органов с поверхностью бревна уменьшается по периметру. Для увеличения площади взап.мо- действия рабочих органов 5 и 6 с бревном необходимо новернуть их на определенный угол. Это достигается за счет кинематических пар винт 17 - гайка 18. При включении гидроцилиндров 12 и 13 штоки выдвигаются, так как каждый шток 14 этих гидроцилиндров шарнирно соединен с муфтой 33, то валы 9 и 10 отклонятся, а так как гайка 18 жестко соединена с подшипниковой опорой 19, то рабочие органы 5 и 6 смонтированные на валах 9 и 10, повернутся, на определенный угол. За счет максимального охвата рабочими органами поверхности бревна при постоянной кривизне образующей последних обеспечивается повьипение качества опорки и производительности, вызванной непрерывностью процесса.
Формула изобретения Окорочный станок, содержащий раму, на которой смонтирован механизм подачи, приводные верхний, нижний и боковые рабочие органы, размещенные на валах поочередно и последовательно вдоль продольной оси станка, и механизм прижима рабочих органов для образования симметричного замкнутого режущего ко(тура, отличающийся тем, что, с целью повышения качества и производительности, механизм прижима верхнего и боковых рабочих органов выполнен в виде гидроцилиндров, шток каждого из которых соединен с валами посредством кинематической пары 10 вом.
винт-гайка для поворота валов рабочих органов относительно продольной оси станка, причем в механизме прижима верхнего рабочего органа гайка закреплена на раме, а винт связан с щтоком, а в механизмах прижима боковых рабочих органов винт закреплен на раме, а гайка - - на подшипниковой опоре вала, при этом нижний и верхний рабочие органы связаны между собой синхронизирующим устройст0
0
В-5
Buffs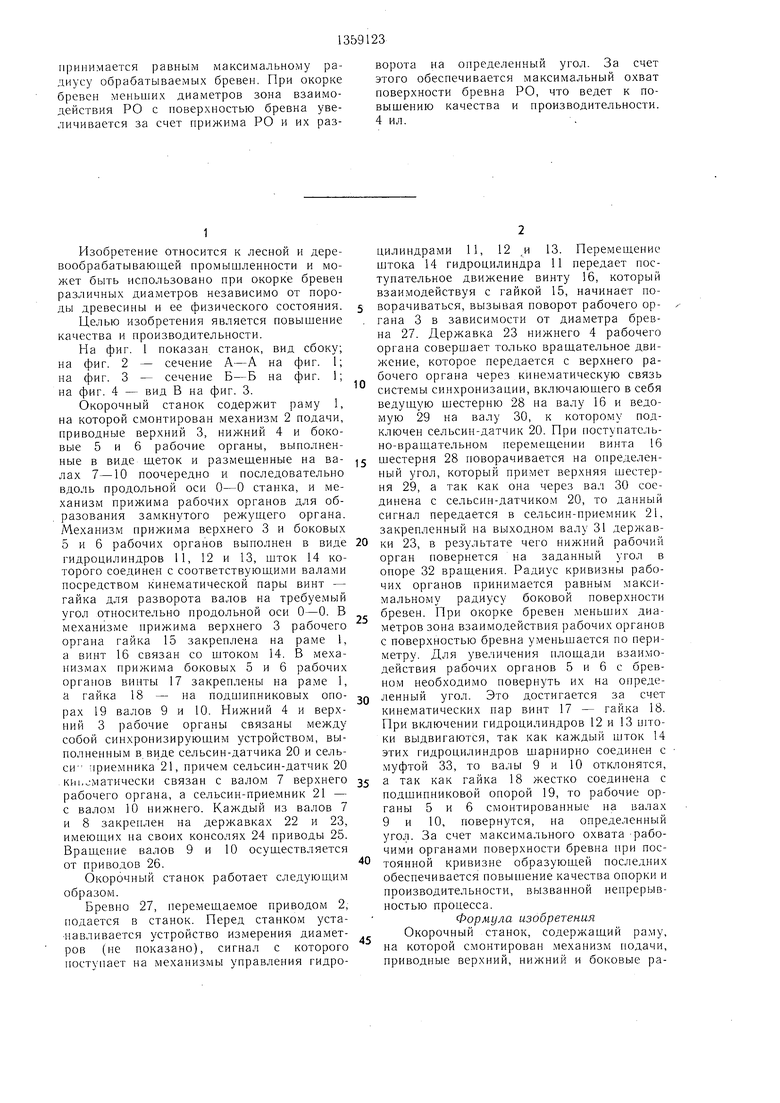
| название | год | авторы | номер документа |
|---|---|---|---|
| Окорочный станок | 1988 |
|
SU1595639A2 |
| Окорочный станок | 1980 |
|
SU870138A1 |
| Окорочно-зачистной станок роторного типа | 1978 |
|
SU704789A1 |
| Окорочный станок | 1983 |
|
SU1097495A1 |
| Подающее устройство стволообрабатывающего станка | 1976 |
|
SU582963A1 |
| Окорочный станок | 1987 |
|
SU1440719A1 |
| Окорочный станок | 1979 |
|
SU844310A1 |
| Автоматическая установка для окорки бревен | 1973 |
|
SU491472A1 |
| Окорочный станок роторного типа | 1977 |
|
SU656835A1 |
| Станок для окорки и раскалывания лесоматериалов,ножевая головка для раскалывания лесоматериалов,нажимная плита механизма надвигания,окорочная фреза,механизм поворота лесоматериалов и загрузочное приспособление окорочного станка | 1981 |
|
SU1009765A1 |

Изобретение относится к лесноГ, промышленности и может быть испо,:ьзовано при окорке древесины. Цель - повышение качества и производительности. На раме 1 смонтированы рабочие органы (РО) в виде металлических ш,еток: верхний 3, нижний 4 и два боковых (не показаны), охватывающих бревно 27 по периметру его сечения. РО 3 и 4 смонтированы на валах 7 и 8 посредством державок 22 и 23. Державка 22 верхнего РО через ходовый вппт 16 соединена со штоком гидроцилиндра 11, управление которым осушествляется сигналом от устройства измерения диаметров. При выдвижении штока 14 гидроцилиндра 11 винт 16, взаимодействуя с гайкой 15, закрепленной на раме 1, поворачивается и разворачивает державку 22 и, следовательно, РО 3. Разворот РО 3 вызывает аналогичный разворот РО 4, так как oini связаны между собой устройством синхронизации, включающим сельсин-датчик 20, сельсин-приемник 21, ведущую 28 п ведомую 29 шестерни и опору вращения 32 РО 4. Аналогично разворачиваются боковые РО,но кинематическая пара винт-гайка для поворота валов боковых РО действует по обратному принципу; винты закреплены на,раме, а гайки - на валах посредством подшипниковых опор. Радиус кривизны РО S (Л 00 СП со Ю со
| Окорочный станок | 1980 |
|
SU870138A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Автоматизированный спортивный тренажер | 1976 |
|
SU624646A1 |
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
