Изобретение относится к машино- строению и может быть использовано в различных отраслях народного хозяйства для шагового перемещения объектов производства в одном направлении
Целью изобретения является повышение точности фиксации рабочего органа конвейера.
На чертеже показано устройство в положении фиксации рабочего органа конвейера на рабочей позищш.
Устройство содержит основание 1, на котором смонтированы конвейер с рабочим органом 2 в виде бесконечной цепи с. выступами Э и силовой цилиндр
4,являющийся приводом возвратно-поступательного движения ползуна 5. Ра (бочий орган 2 конвейера - цепь с выступами 3 - расположен на основании с возможностью перемещения. Шток силового цилиндра 4 связан с ползуном
5,установленным на на правляюцей 6 оснбвания с возможностью возвратно- поступательного перемещения.
На ползуне 5 на осях установлены поворотные подпружиненные поворотные ведущая 7 и фиксирующая 8 собачки, которые установлены с возможностью взаимодействия с выступами 3 цепи 2.
На основании 1 расположен непод- вижньй упор 9, регулируемый посредством винтовой нарезки в направлении перемещения ползуна 5. Поворотная фиксирующая собачка 8 установлена на ползуне 5 с возможностью взаимодействия с неподвижным упором 9,при этом расстояние от неподвижного упора 9 да выступов 3 рабочего органа 2 в направлении, перпендикулярном направлению перемещения рабочего органа - цепи, меньше, чем расстояние от оси 10 фиксирующей собачки В до выступов 3 рабочего органа конвейера Момент силы реакции упора 9 направлен против часовой стрелки и способствует силовому замыканию кинематической цепи силовой цилиндр .4 - ведущая собачка 7 - звенья цепи 2 - фиксирующая собачка 8 - упор 9, чем достигается выборка зазоров в этой цепи и повышение точности фиксации рабочего органа конвейера.
На основании 1 также смонтирована с зазором относительно выступа 3 стопорная собачка 11.
Устройство работает следукнцим образом.
При подаче рабочей среды в што- ковую полость силового цилиндра 4 связанный с его штоком ползун 5 перемещается по направляющей 6 влево. Одновременно с ним под воздействием собачки 8 на выступ 3 влево перемещается и цепь 2 конвейера до упора выступа 3 в стопорную собачку 11,
за счет чего образуется зазор между собачкой 8 и упором 9, обеспечивающий возможность собачке 8 выйти из . зацепления с выступом 3. Перемещение ползуна 5 влево продолжается до вступления ведущей собачки 7 в зацепление с очередным выступом 3, после чего силовой цилинд 4 переключается на питание бесштоковой полости и под воздействием ведущей собачки 7
цеиь 2 конвейера перемещается вправо до встречи фиксирующей собачки 8 с упором 9 и выборки зазоров в размерной цепи упор 9 - собачка 8 - собачка 7 - ползун 5 - шток силового цилиндра 4.
Таким образом осуществляется перемещение цепи 2 конвейера на шаг и ее фиксация на рабочей позиции, точное положение которой относительно основания 1 регулируется перемещением упора 9 посредством винтовой нарезки.
Формула изобретения
1. Устройство шагового перемеще-:
ния, содержащее основание, расположенный на основании с возможностью перемещения рабочий орган конвейера с выступами, установленный на основании с возможностью возвратно-поступательного перемещения вдоль рабочего органа ползун, расположенную на ползуне с возможностью взаимодействия с выступами рабочего органа поворотную ведущую собачку, уста-новленную на оси с возможностью взаимодействия с выступами рабочего органа поворотную фиксирукяцую собачку и привод возвратно-поступательного движения ползуна, отличающ е е с я тем, что, с целью повышения точности фиксации рабочего ор гана конвейера, оно снабжено расположенным на основании неподвижным упог ром, причем поворотная фиксирующая
собачка установлена на ползуне с возможностью взаимодействия с неподвижным упором, при этом расстояние от неподвижного упора до выступов рабочего органа в направлении, пер
313626894
пендикулярном-направлению перемеще- 2. Устройство по п. 1, о т л и- ния рабочего органа, меньше, чем чающееся тем, что неподвиж- расстояние от оси фиксирукхдей собач- ный упор выполнен регулируемым в ки до выступов рабочего органа. . направлении перемещения ползуна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство шагового перемещения | 1983 |
|
SU1119935A1 |
| Шаговый конвейер | 1988 |
|
SU1553453A1 |
| Устройство шагового перемещения | 1985 |
|
SU1316942A2 |
| Шагающий конвейер | 1986 |
|
SU1452755A1 |
| Поточно-механизированная сборочнаялиНия | 1978 |
|
SU804548A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Поворотное устройство | 1980 |
|
SU904994A2 |
| Привод шагового конвейера | 1987 |
|
SU1523480A1 |
| Привод шагового конвейера | 1980 |
|
SU905166A1 |
| Устройство шагового перемещения | 1984 |
|
SU1232594A1 |
Изобретение относится к машиностроению и м„б„ использовано в различных отраслях народного хозяйства. Цель изобретения - позьшение точности фиксации рабочего органа. На основании 1 устройства смонтированы конвейер и рабочий орган (РО) 2 конвейера с выступами(В) 3,на котором установлен ползун 5. На ползуне 5 с возможностью взаимодействия с В 3 расположена поворотная ведущая собачка (с) 7, а на оси 10-поворотная фиксирующая С 8. На основании 1 расположены привод 4 возвратно-поступательного движения ползуна 5 и неподвижный упор 9, взаимодействующий с С 8 и регулируемым в направлении перемещения ползуна 5. Расстояние от упора 9 до В 3 в направлении,перпендикулярном направлению перемещения РО 2, меньше, чем расстояние от оси 10 до В 3. Под воздействием С 8 на В 3 перемещается РО 2 до образования зазора меж,цу С 8 и упором 9, При этом С 8 вьтходит из зацепления с В 3. Перемещение ползуна 5 продолжается до вступления С 7 в зацепление с очередным В 3. Под воздействием С 7 перемещается РО 2 в противоположную сторону до встречи С 8 с упором 9. Т.обр, осуществляются перемещение РО 2 на шаг и фиксация его на рабочей позиции. 1 3.п. ф-лы. 1 ил. о S 1 г I/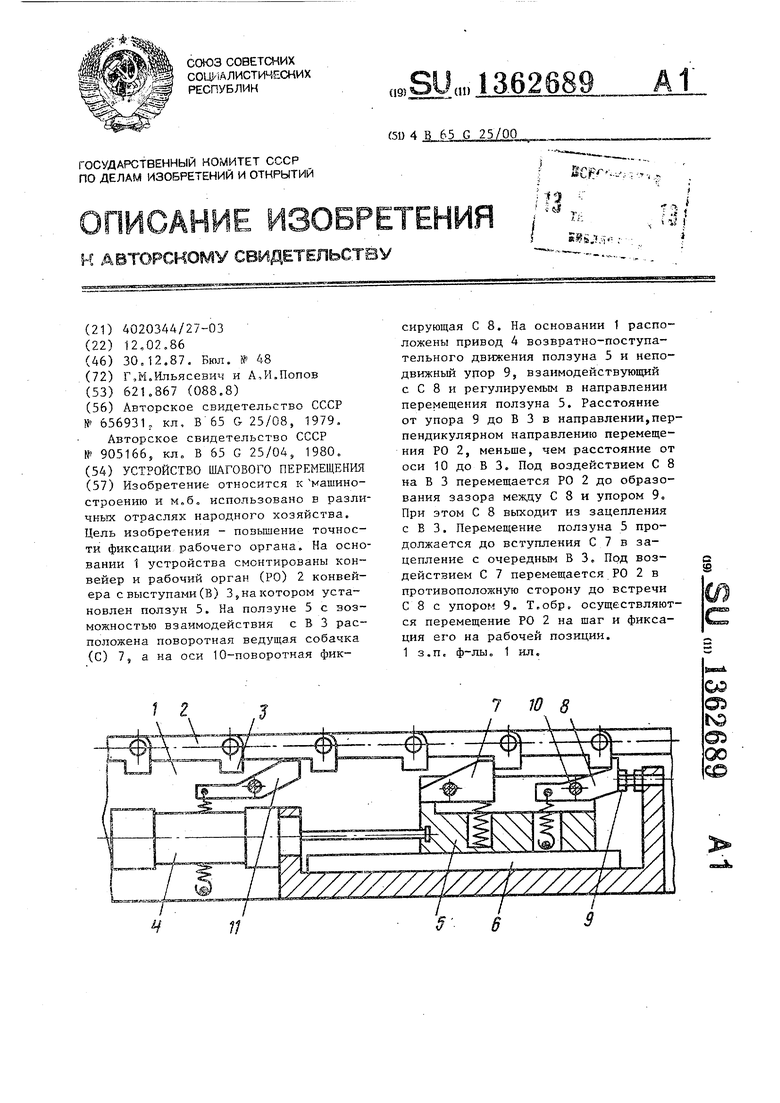
| Фрикционный амортизатор | 1942 |
|
SU65693A1 |
| Привод шагового конвейера | 1980 |
|
SU905166A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
