Изобретение относится к машиностроению и может быть использовано в различных отраслях народного хозяйства для шагового перемешения объектов производства с последующим возвратом в исходное положение (загрузочное устройство, сборочные и упаковочные машины и т.п.).
Цель изобретения - расширение технологических возможностей устройства.
На чертеже изображено устройство, вид сверху.
Устройство шагового перемеш.ения содержит неподвижное основание i, на направ- ляюших 2 которого установлена подвижная рама 3 в виде перемеш,аемого объекга стола, связанного с приводом возвратно-поступательного перемешения силовым цилиндром 4, закрепленным на основании 1. На подвижной раме 3 выполнены выступы 5, а на ее противоположных концах закреплены два упора 6. Подпружиненная собачка 7 в гшде цилиндрического стержня с выполненными на нем фиксируюшей 8 и вспомогательной 9 гранями подпружинена пружиной 10 и смонтирована на основании 1 с возможностью поворота и возвратно-поступательного перемеш.ения в плоскости, перпендикулярной направлению перемешения подвижной рамы 3. Через шестерню 11 собачка 7 связана с зубчатой рейкой 12, взаимодействуюш.ей с по- мошью пальца 13 с упорами 6 подвижной рамы 3, а парой поводков 14 и 15 - с упором в виде асимметричной по длине планки 16, закрепленной на копире 17 осью - винтом 18 в крестообразном пазу 19, позво- ляюшим устанавливать ее в продольном (показано на чертеже) или в поперечном положении. Копир 17 посредством толкателя 20 с роликом 2 кинематически связан с собачкой 7. На зубчатой рейке 12 закреплены лепестки 22 и 23, взаимодействующие соответственно с датчиками 24 и 25 крайних положений подвижной рамы 3, а датчик 26 реверса силового цилиндра 4 взаимодействует с лепестком 27, связанным с собачкой 7.
Устройство работает следующим образом.
Фиксация подвижной рамы 3 в необходимом положении осуществляется подачей рабочей среды в штоковую полость силового цилиндра 4, который прижимает выступ 5 подвижной рамы 3 к фиксирующей грани 8 собачки 7. При этом датчик 26 реверса включен лепестком 27, а датчик 24 левого крайнего положения подвижной рамы 3 - лепестком 22. При поступлении сигнала на перемеш,ение силовой цилиндр 4 переключается на питание бесштоковой полости и перемещает раму 3 по направляющим 2 основания 1 вправо, при этом очередной выступ 5 воздействует на вспомогательную грань 9 собачки 7, преодолевая усилие пружины 10, утапливает собачку 7 и отключает датчик 26 реверса, подготавливая этим сиг0
5
0
0
5
0
5
налом датчика последующий реверс силового цилиндра 4, который совершается после попадания собачки 7 в очередной паз между выступами 5 и включения датчика 26. После реверсировании силового цилиндра 4 подвижная рама 3 оказывается зафиксированной на очередной позиции.
При поступлении нового сигнала аналогичным образом осуществляется следуюш,ий шаг перемещения подвижной рамы 3.
После выполнения последнего щагового перемещения подвижной рамы 3 при подаче нового сигнала рама начинает перемещение по-прежнему ьправо и при этом левым упо- ро.м 6 через палец 13 передвигает зубчатую рейку 12 вправо, выключая датчик 24 левого и включая лепестком 23 датчик 25 правого крайнего положения подвижной рамы 3.
Одновременно с этим зубчатая рейка 12 через щестерню 11 поворачивает собячку 7 на 180°, а поводком 14, воздействуя на планку 16, смещает копир 17 вправо, относительно его среднего положения, в котором он находился до этого. Копир 17 через ролик 21 и толкатель 20 утапливает собачку 7, выводя этим самым ее из зоны зацепления с выступами 5 подвижной рамы 3 и выключая датчик 26 реверса. При включении датчика 25 силовой цилиндр 4 переключается на питание штоковой полости и подвижная рама 3 перемешается бесступенчато влево, поскольку собачка 7 утоплена копиром 17. В конце хода подвижная рама 3 правым упором 6 через палец 13 возвращает зубчатую рейку 12 в исходное положение, собачка 7 поворачивается обратно на 180, а от поводка 15, воздействующего на планку 16, копир 17 смещается влево в среднее положение и вводит собачку 7 в зону зацепления с выступами 5, включая датчик 26 реверса, по сигн1лу которого силовой цилиндр 4 реверсируется до прохождения последним правым выступом 5 собачки 7, после чего собачка указанным способом фиксируется в исходном положении.
Устройство таким образом снова готово к шаговому перемещению подвижной рамы вправо и бесступенчатому ее возврату влево.
Если развернуть асимметричную подлине планку 16 вокруг оси - винта 18 на 180° и снова зафиксировать ее в пазу 19, устройство работает аналогичным образом, только изменяется направление шагового и бесступенчатого перемещения на обратное за счет того, что копир 17 смещается от среднего положения влево от воздействия поводка 15, а возвращается в среднее положение от поводка 14.
При установке планки 16 в поперечное копиру 17 положение поводки 14 и 15 отключаются от взаимодействия с ней и смещения копира 17 от среднего положения не будет, т.е. собачка 7 находится в зоне
1232594
34
зацепления с выступами 5 при перемеще-Takим образом, устройство шагового пении подвижной рамы 3 в обе стороны, аремещения обеспечивает три режима работы: так как в крайних положениях подвиж-шаговое перемещение вправо, бесступенча- ной рамы 3 всегда происходит развороттое - влево, шаговое перемеш.ение влево, бессобачки 7 на 180°, то в этом случае пе-ступенчатое - вправо и шаговое переме- ремещение будет шаговым в обе стороны. щение в обе стороны.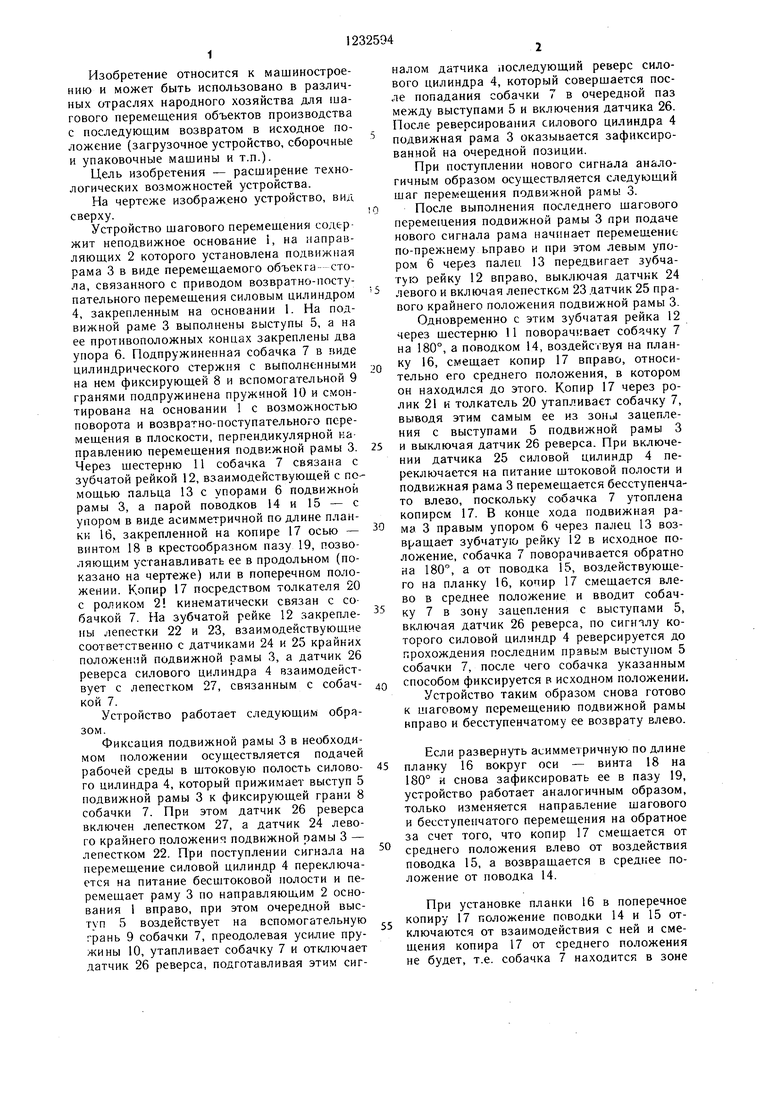
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство шагового перемещения | 1983 |
|
SU1119935A1 |
| Устройство шагового перемещения | 1985 |
|
SU1316942A2 |
| Механизм шаговой подачи | 1979 |
|
SU986687A1 |
| Устройство для подачи полосового материала в рабочую зону пресса | 1986 |
|
SU1371746A1 |
| Лесопосадочная машина | 1987 |
|
SU1463163A1 |
| Устройство для ступенчатого перемещения платформы | 1985 |
|
SU1284938A1 |
| Устройство для маркирования листового материала | 1982 |
|
SU1159679A1 |
| Шаговый конвейер бнч-3 | 1979 |
|
SU893743A1 |
| Поточная линия для обработки изделий | 1982 |
|
SU1081101A1 |
| Манипулятор | 1982 |
|
SU1009754A1 |

| Устройство шагового перемещения | 1983 |
|
SU1119935A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для передачи и фиксации де-ТАлЕй пО пОзицияМ | 1979 |
|
SU835897A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
