Изобретение относится к машиностроению и может быть иснользовано в различных отраслях народного хозяйства для шагового перемещения объектов производства с последуюп1им возвратом в исходное положение.
Цель изобретения - повышение надежности устройства.
На чертеже показано устройство, вид в плане.
Устройство содержит неподвижное основание 1, закрепленные на нем направляющие 2, установленную на направляющих подвижную раму 3 в виде стола, связанного с приводом возвратно-поступательного перемепления в виде силового цилиндра 4, смонтированного на основании 1. На противоположных концах подвижной рамы 3 закреплены упоры 5 и 6, а сбоку - сменная рейка 7 с выступами 8.
Основная собачка 9, установленная на оси 10, закрепленной на основании, имеет возможность взаимодействия с выступами 8 рейки 7 и оснащена роликом 11. Механизм взведения собачки 9 выполнен в виде закрепленной одним концом на основании, а другим на самой собачке пружины 12 и ограничительного упора 13. На собачке 9 установлен лепесток 14 с возможностью взаимодействия с закрепленным на основании датчиком 15 реверса привода возвратно-поступательного перемещения. Роликом 11 собачка 9 кинематически связана с переключателем в виде копира 16, смонти- рованнного на основании с возможностью возвратно-поступательного перемещения под воздействием упоров 5 и 6 и снабженного лепестками 17 и 18, воздействующими на датчики 19 и 20 соответственно левого и правого крайних положений подвижной рамы 3, закрепленные на основании 1.
В соседней с основной собачкой 9 выем- ,ке между выступами 8 рейки 7 противонаправленно ей на расстоянии, превышающем толщину выступа, расположена дополнительная собачка 21, установленная на оси 22, закрепленной на основании. Собачка 21 подпружинена пружиной 23 и упирается в ограничительный упор 24.
Серьгой 25 дополнительная собачка соединена с приводным элементом в виде элект- ройагнита 26, электрически связанного с дат- чик рм 15 реверса привода возвратно-поступательного перемещения рамы 3 и датчиком 22 ее правого крайнего положения.
Устройство работает следующим образом.
В исходном положении подвижной рамы 3, как и в любом рабочем положении, датчик 15 включен лепестком 14, а датчик 19 левого крайнего положения подвижной рамы - лепестком 17. При этом рабочая среда подается в штоковую полость
силового цилиндра 4, прижимающего выступ 8 рейки 7 к собачке 9, которая, упираясь в упор 13, фиксирует подвижную раму 3. Электромагнит 26 включен и под его воздействием собачка 21 выведена из выемки рейки 7.
При поступлении внещнего сигнала, например, от промыщленного робота, силовой цилиндр 4 переключается на питание
0 бесштоковой полости и перемещает подвижную раму 3 по направляющим 2 основания 1 вправо. При этом собачка 9 под воздействием выступа 8 поворачивается вокруг оси 10 по часовой стрелке и отклюг чает датчик 15. Датчик 19 остается включенным. По сигналу датчика 15 отключается электромагнит 26. Собачка 21 пружиной 23 поворачивается по часовой стрелке до упора 24 и входит в следующую выемку рейки 7.
0 Подвижная рама 3 перемещается до упора очередного выступа 8 в собачку 21 и останавливается на ней. Таким образом, исключается возможность перебега очередного выступа, т.е. пропуска щага.
5 После этого собачка 9 под воздействием пружины 12 поворачивается против часовой стрелки и, благодаря наличию зазора между пей и выступом 8, свободно попадает в очередную выемку на рейке и лепестком 14 включает датчик 15, по сигналу ко0 торого привод реверсируется и прижимает выступ 8 к собачке 9. Между выступом и собачкой 21 образуется зазор, благодаря которому включенный по сигналу датчика 15 электромагнит 26 воздействует через серьгу 25 на собачку 21 и выводит ее из за5 цепления с рейкой 7. Устройство готово к отработке следующего шага, который выполняется таким же образом после поступления внешнего сигнала.
После выполнения последнего шагового
перемещения подвижной рамы 3 при поступлении нового сигнала от внешнего устройства подвижная рама начинает перемещаться вправо, упором 5 передвигает копир 16 вправо, выключая лепестком 17 датчик 19 и включая лепестком 18 датчик 20 правого крайнего положения подвижной рамы. Копир 16, воздействуя на ролик 11. поворачивает собачку 9 по часовой стрелке, выводит ее из зацепления с рейкой 7 и фиксирует в таком положении.
По сигналу датчика 20 в штоковую полость цилиндра 4 подается рабочая среда, и подвижная рама перемещается влево. При этом электромагнит 26 остается включенным, т.е. собачка 21 во время обратного
хода рамы 3 выведена из зоны зацепления с рейкой 7, что исключает излишний шум. В конце хода цилиндра влево упор 6 перемещает копир 16 влево, выключает датчик
20, включает датчик 19 и вводит собачку 9 в зону зацепления с рейкой 7, после чего цилиндр 4 переключается на ход вправо и указанным способом фиксирует раму 3 в исходном положении. Устройство снова готово к работе.
Предлагаемое устройство шагового перемещения имеет повышенную надежность в результате фиксации подвижной рамы во время реверсирования привода на дополнительной собачке, исключающей возможность пропуска шага.
Формула изобретения Устройство шагового перемещения по авт. св. № 1119935, отличающееся тем, что, с целью повышения надежности, оно снабжено дополнительной фиксирующей собачкой, подпружиненной относительно сменной рейки, установленной противонаправленно основной фиксирующей собачке в смежной с ней выемке рейки и оснащенной приводным элементом, при этом расстояние между собачками больще толщины выступа рейки, а приводной элемент связан с датчиком реверса привода.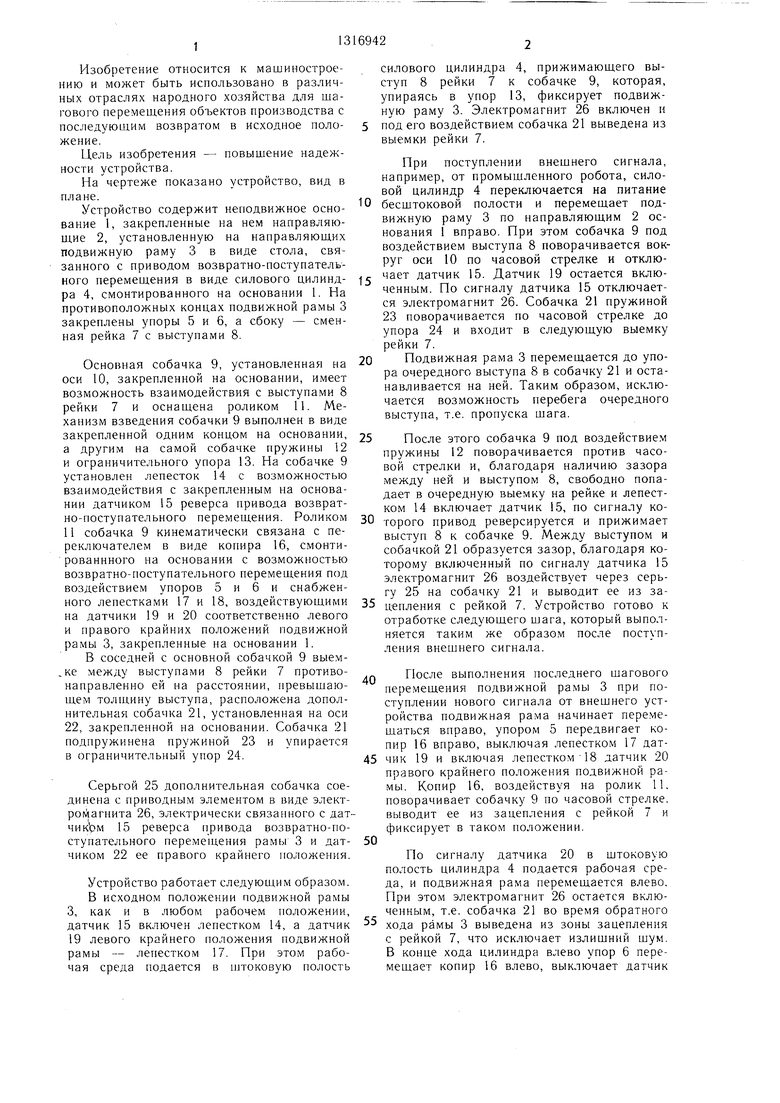
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство шагового перемещения | 1984 |
|
SU1232594A1 |
| Устройство шагового перемещения | 1983 |
|
SU1119935A1 |
| Устройство для маркирования листового материала | 1982 |
|
SU1159679A1 |
| Шагающий конвейер | 1986 |
|
SU1452755A1 |
| Загрузочное устройство | 1987 |
|
SU1437184A1 |
| Устройство для измерения линейных размеров цилиндрических изделий | 1979 |
|
SU875207A1 |
| Устройство для подачи полосового материала в рабочую зону пресса | 1986 |
|
SU1371746A1 |
| Устройство для гибки колец на концах проводов или проволоки | 1980 |
|
SU925490A1 |
| Устройство для контактной стыковой сварки деталей из термопластов | 1988 |
|
SU1646891A1 |
| Устройство для шагового перемещения исполнительного органа установки для подачи материала в зону обработки | 1987 |
|
SU1433586A1 |
Изобретение относится к области машиностроения и нозволяет повысить надежность устройства. Для этого устройство снабжено дополнительной фиксируюн;ей собачкой (ФС) 21. Она подпружинена относительно сменной рейки 7 с выстунами (В)8, закрепленной сбоку подвижной рамы 3 устройства. На закрепленной на основании 1 устройства оси 10 установлена основная ФС 9 с возможностью взаимодействия с В 8, ocHaniena роликом 1 1, которым кинематически связана с переключателем в виде ко5 баЫ я нира 16 с лепестками ФС 21 установлена в соседней с ФС 9 выемке рен- ки 7 противонаправленно ФС 9 на расстоянии, превышающем толщину В 8, и ос- напдена приводным элементом 26, связанным с датчиком 15 реверса привода (П)4 возвратно-поступательного перемещения рамы 3. В исходном положении рамы датчик 15 включен лепестком 14 ФС 9, а датчик 19 левого крайнего положения рамы 3 - лепестком 17. При этом П 4 прижимает В 8 к ФС 9, которая, упираясь в упор 13. фиксирует раму 3. Элемент 26 включен и ФС 21 выведена из выемки рейки 7. При реверсировании П 4 он переметает раму 3 вправо по направляющим 2 основания 1. Под воздействием В 8 поворачивается ФС 9 и отключает датчик 15 и соответственно элемент 26, а ФС 21 входит в следующую выемку рейки 7. Рама 3 перемещается до упора очередного В 8 в ФС 21 и останавливается. Таким образом, исключается возможность пропуска щага. 1 ил. 7 2. 5 4. 77 76 J.L 10 77 9 2J 2522 7 / / / / / / 8 78 4- I СХ5 fV)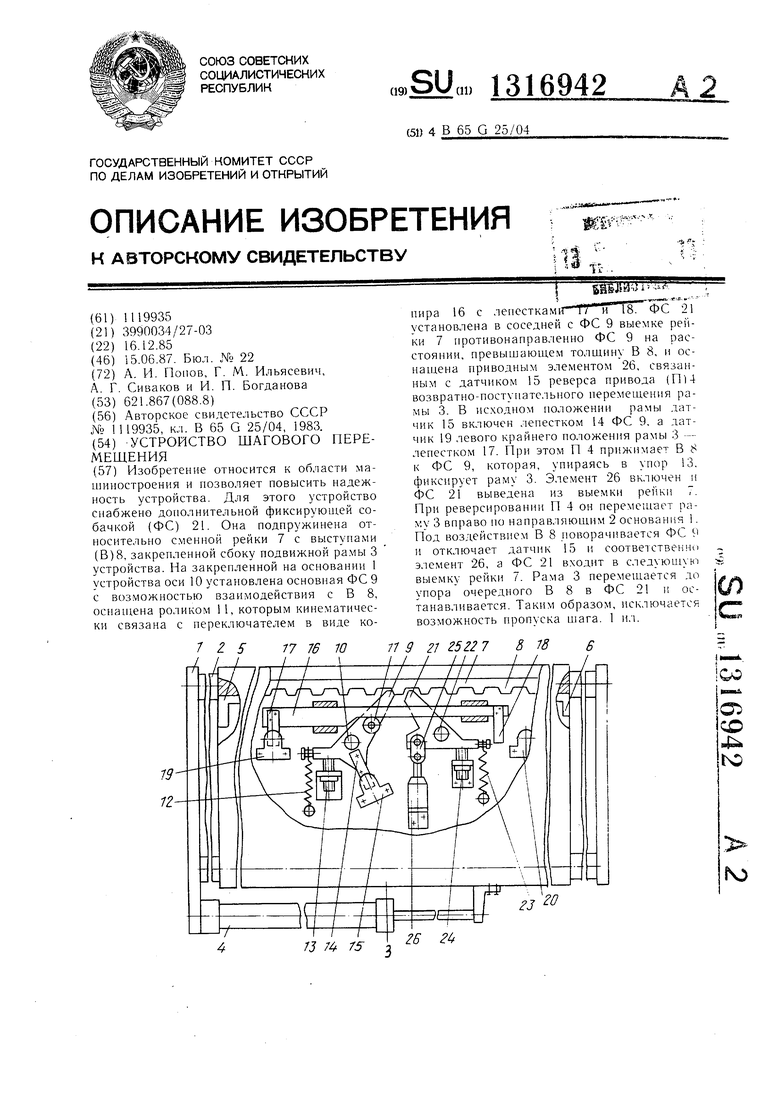
| Устройство шагового перемещения | 1983 |
|
SU1119935A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
