Изобретение относится к машиностроению и может быть использовано в различных отраслях народного хозяйства для шагового перемещения различных объектов с последующим возвратом в исходное положение (столы загрузочных устройств, сборочных и упаковочных мащин и т.п.).
Известно устройство щагового перемещения, содержащие привод перемещения и механизм фиксации объекта на рабочей позиции 1.
Недостатком устройства является наличие двух автономных исполнительных механизмов, привода и фиксации, что усложняет конструкцию устройства и снижает их производительность, так как для нормального функционирования устройства требуется последовательное действие этих механизмов.
Наиболее близким техническим решением из известных является устройство шагового перемещения, содержащее неподвижное основание, установленную на нем подвижную раму с выступами, щарнирно закрепленную на неподвижном основании и установленную с возможностью взаимодействия с выступами подвижной рамы фиксирующую собачку, механизм взведения фиксирующей собачки, и привод возвратно-поступательного перемещения подвижной рамы.
Известное устройство позволяет осуществить перемещение объекта на шаг и его фиксацию в рабочем положении одним ходом силового цилиндра, что упрощает его конструкцию по сравнению с вышеуказанным устройством 2.
Вместе с тем, он не дает возможности возврата перемещаемого объекта в исходное положение, а также не позволяет изменять величину шага, что ограничивает его функциональные возможности.
Целью изобретения является расширение функциональных возможностей устройства.
Указанная цель достигается тем, что в устройстве щагового перемещения, содержащем неподвижное основание, установленную на нем подвижную раму с выступами, шарнирно закрепленную на неподвижном основании и установленную с возможностью взаимодействия с выступами подвижной рамы фиксирующую собачку, механизм взведения фиксирующей собачки, и привод возвратно-поступательного перемещения подвижной рамы, последняя снабжена расположенными на противоположных ее концах упорами и сменной рейкой, а неподвижное основание снабжено установленным с возможностью взаимодействия с фиксирующей собачкой датчиком реверса привода возвратно-поступательного перемещения подвижной рамы, датчиками крайних положений подвижной рамы и копиром, установленным с возможностью взаимодействия с упорами подвижной рамы и датчиками крайних положений подвижной рамы, при этом фиксирующая собачка установлена с возможностью опускания и фиксации посредством копира.
На чертеже изображено устройство, общий вид.
Устройство содержит неподвижное основание 1, закрепленные на неподвижном основании 1 направляющие 2, установленную
в направляющих подвижную раму 3 в виде перемещаемого объекта-стола, связанного с приводом возвратно-поступательного перемещения в виде силового цилиндра 4, смонтированного на основании 1.
5 На противоположных концах подвижной рамы 3 закреплены упоры 5, 6 и сменная рейка 7 с выполненными на ней фиксирующими выступами 8.
Установленную с возможностью взаимодействия с выступами 8 рейки 7 фиксирую0 щую собачку 9, расположенную на основании 1 с возможностью поворота вокруг оси 10. Фиксирующая собачка 9 имеет ролик 11. Механизм взведения фиксирующей собачки 9 выполнен в виде закрепленной одним кон5 цом на основании 1, а другим на самой собачке 9 пружины 12 и закрепленного на основании 11 упора 13, к которому поджата собачка 9. Собачка 9 также имеет лепесток 14, установленный с возможностью взаимодействия с закрепленным на неподвижном
0 основании 1 датчиком 15 реверса привода возвратно-поступательного перемещения подвижной рамы 3. Собачка 9 роликом 11 кинематически связана с переключателем в виде копира 16, смонтированного на основании 1 с возможностью возвратного переме щения под воздействием упоров 5, 6 и снабженного лепестками 17 и 18, воздействующими на датчики 19 и 20 соответственно левого и правого крайнего положения подвижной рамы 5, закрепленные на неподвижном ос0 новании 1.
Фиксирующая собачка 9 установлена с возможностью опускания и фиксации посредством копира 16.
Устройство работает следующим образом.
В исходном положении подвижной рамы 3 (и в любом рабочем) датчик 15 включен лепестком 14, а датчик 19 левого крайнего положения подвижной рамы 3 лепестком 17,
при этом рабочая среда подается в штоковую полость силового цилиндра 4, прижимающего фиксирующий выступ 8 рейки 7 к собачке 9, которая, упираясь в упор 13, фиксирует подвижную раму 3.
При поступлении внешнего сигнала,, например от промышленного робота, силовой цилиндр 4 переключается на питание бесщтоковой полости и перемещает подвижную раму 3 по направляющим 2 основания 1
вправо, при этом собачка 9 под воздействием выступа 8 поворачивается вокруг оси 10 по часовой стрелке и отключает датчик 15, датчик 19 остается включенным. После прохождения очередного выступа 8 собачка 9 под воздействием пружины 12 поворачивается против часовой стрелки и включает лепестком 14 датчик 15,который выдает сигнал на реверс привода, цилиндр 4 переключается на питание штоковой полости и вновь фиксирует подвижную раму 3 при помощи выступа 8, собачки 9 и упора 13.
При поступлении нового сигнала от внешнего устройства аналогичным образом выполняется следующий шаг перемещения подвижной рамы 3.
После выполнения последнего шагового перемещения подвижной рамы 3 при подаче сигнала от внешнего устройства перемещаемый объект начинает перемещаться по-прежнему вправо и при этом упором 5 передвигает копир 16 вправо, выключая лепестком 17 датчик 19 и включая лепестком 18 датчик 20 правого крайнего положения, перемещаемого объекта подвижной рамы 3, а копир 16, воздействуя на ролик 11, поворачивает собачку 9 по часовой стрелке, выводит ее из зацепления с рейкой 7 и фиксирует ее в этом положении.
По сигналу датчика 20 в штоковую полость цилиндра 4 подается рабочая среда и подвижная рама 3 перемещается влево, в KOHtte хода упор 6 перемещает копир 16 влево, выключает датчик 20, включает дат чик 19 и вводит собачку 9 в зацепление с рейкой 7, после чего цилиндр 4 перемещается на ход вправо и выщеописанным способом фиксирует подвижную раму 3 в исходном положении. Устройство снова готово к работе.
При необходимости изменения шага перемещения подвижной рамы достаточно смонтировать на нем рейку с необходимым шагом, при этом больще никакой переналадки не требуется.
Устройство имеет широкие функциональные возможности, поскольку OHQ обеспечивает возврат перемещаемого объекта в исходное положение, а также позволяет изменять величину шага.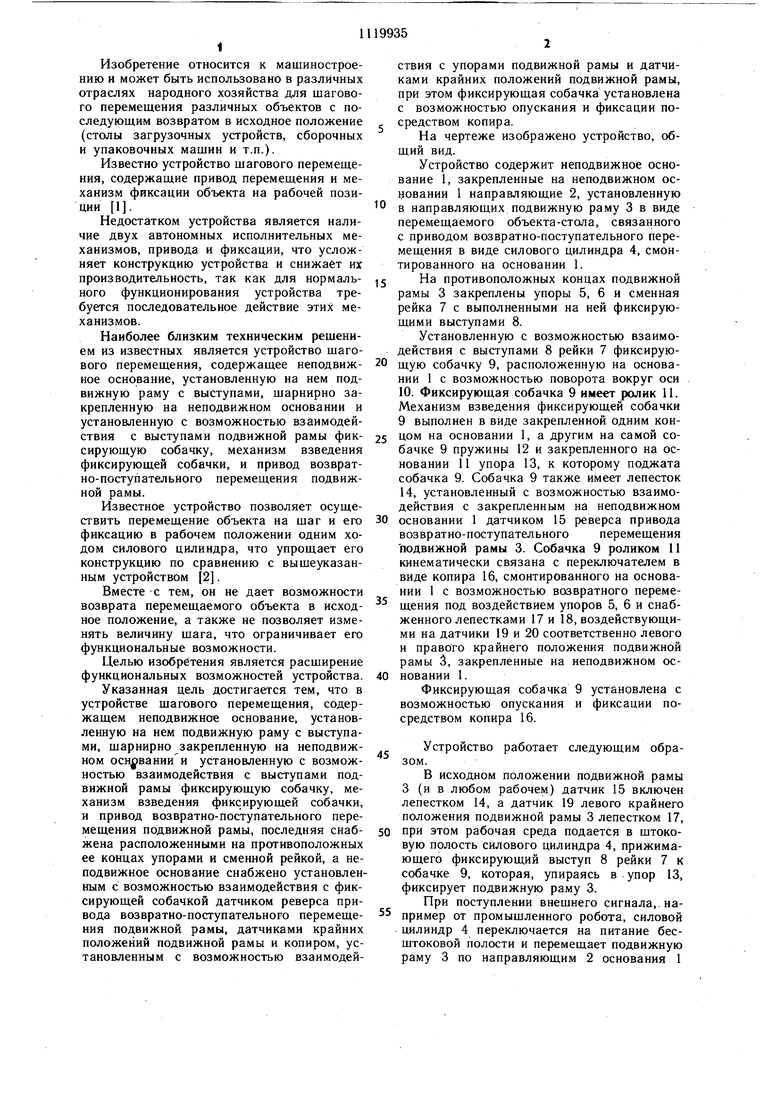

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство шагового перемещения | 1985 |
|
SU1316942A2 |
| Устройство шагового перемещения | 1984 |
|
SU1232594A1 |
| Устройство шагового перемещения | 1986 |
|
SU1362689A1 |
| Шагающий конвейер-накопитель | 1985 |
|
SU1270075A1 |
| Транспортирующее устройство | 1980 |
|
SU967904A1 |
| Устройство для укладки ампул в кассету | 1988 |
|
SU1622224A1 |
| Загрузочное устройство | 1987 |
|
SU1437184A1 |
| Устройство для подачи штучных заготовок из магазина | 1983 |
|
SU1159697A1 |
| Шагающий конвейер | 1986 |
|
SU1452755A1 |
| Устройство для маркирования листового материала | 1982 |
|
SU1159679A1 |
УСТРОЙСТВО ШАГОВОГО ПЕг РЕМЕЩЕНИЯ, содержащее неподвижное основание, установленную на нем подвижную раму с выступами, шарнирно закрепленную на неподвижном основании и установленную с возможностью взаимодействия с выступами подвижной рамы фиксирующую собачку, механизм взведения фиксирующей собачки, и привод возвратно-поступательного перемещения подвижной рамы, отличающееся тем, что, с целью расширения функциональных возможностей устройства, подвижная рама снабжена расположёнными на противоположных ее концах упорами и сменной рейкой, а неподвижное основание снабжено установленным с возможностью взаимодействия с фиксирующей собачкой датчиком реверса привода возвратно-поступательного перемещения подвижной рамы, датчиками крайних положений подвижной рамы и копиром, установленным с. возможностью взаимодействия с упорами подвижной рамы и датчиками крайних положений подвижной рамы, при этом фиксирующая собачка установлена с возможностью опускания и фиксации посредством копира. СО со 00 01 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Многопозиционный стол | 1979 |
|
SU812531A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Привод шагового конвейера | 1980 |
|
SU905166A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
