Фиг.1
Изобретение относится к машиностроению и может быть использовано при автоматизации технологических процессов механообработки или сборки.
Цель изобретения - повышение надежности работы конвейера.
На- фиг. 1 схематично изображен предлагаемый шаговый конвейер; на фиг. 2 - то же, в исходном положении, на фиг о 3 то же, в фиксированном положении тягового органа; на фиг. то же , в промежуточном состоянии при возвращении ползуна в исходное поло- же ни е.
Шаговый конвейер содержит ведущий 1 и ведомый 2 поворотные элементы з виде звездочек, установленных на основании 3, размещенный на приводных элементах 1 и 2 приводной замкнутый тяговый орган k со спутниками 5, привод 6 шагового перемещения, выполненный в виде пневмоцилиндра 7 с ползуном 8, закрепленным на штоке 9 цилиндра 1, С ведущим поворотным эле- ментом 1 связан и расположен соосно ему диск 10 с равномерно расположенными на его торце роликами 11, которые расположены по окружности. Ползун 8 установлен с возможностью возвратно-поступательного перемещения по основанию 3 и содержит подпружиненную собачку 12, размещенную под козырьком 13. Козырек установлен с возможностью поочередного взаимодействия с двумя смежными роликами 11 при рабочем и холостом ходах. Подпружиненная собачка 12 при рабочем ходе расположена с возможностью взаимодействия с козырьком 13 и роликом 11, а при холостом ходе - с последующим за ним по ходу поворота диска 10 роликом 110
Устройство работает следующим образом.
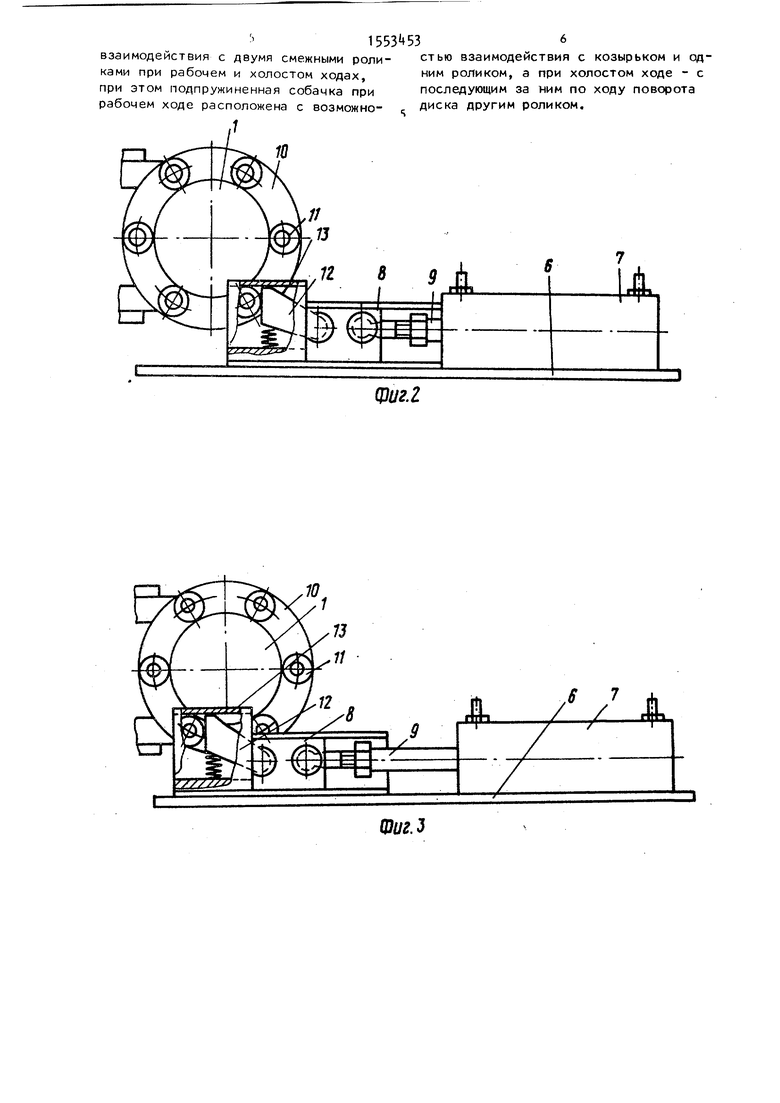
В исходном положении (фиг.2) ползун 8 установлен таким образом, что один из роликов 11, расположенных на торце диска 10, контактирует с подпружиненной собачкой 12 и козырьком 13 установленными на ползуне 8.
По команде на пневмоцилиндр 7 привода 6 от управляющего органа (не показано) происходит перемещение штока 9 с ползуном 8. Собачка 12, взаимодействуя с роликом 11, поворачивает диск 10 и происходит перемещение
тягового органа 4 со спутниками 5 на шаг. При этом ролик 11, совершая дви
5
Q 5
0
5
жение по дуге, теряет контакт с внутренней поверхностью козырька 13, а в конце хода ролик 11 вновь приходит в соприкосновение с внутренней поверхностью козырька 13 и в конечном своем положении заклинивается между козырьком 13 и собачкой 12. Происходит остановка ползуна 8. Благодаря тому, что силовой цилиндр 7 продолжает находиться под давлением, обеспечивается фиксирование тягового органа 4 и точное позиционирование спутников 5 на технологической позиции
(ФИГ„3).
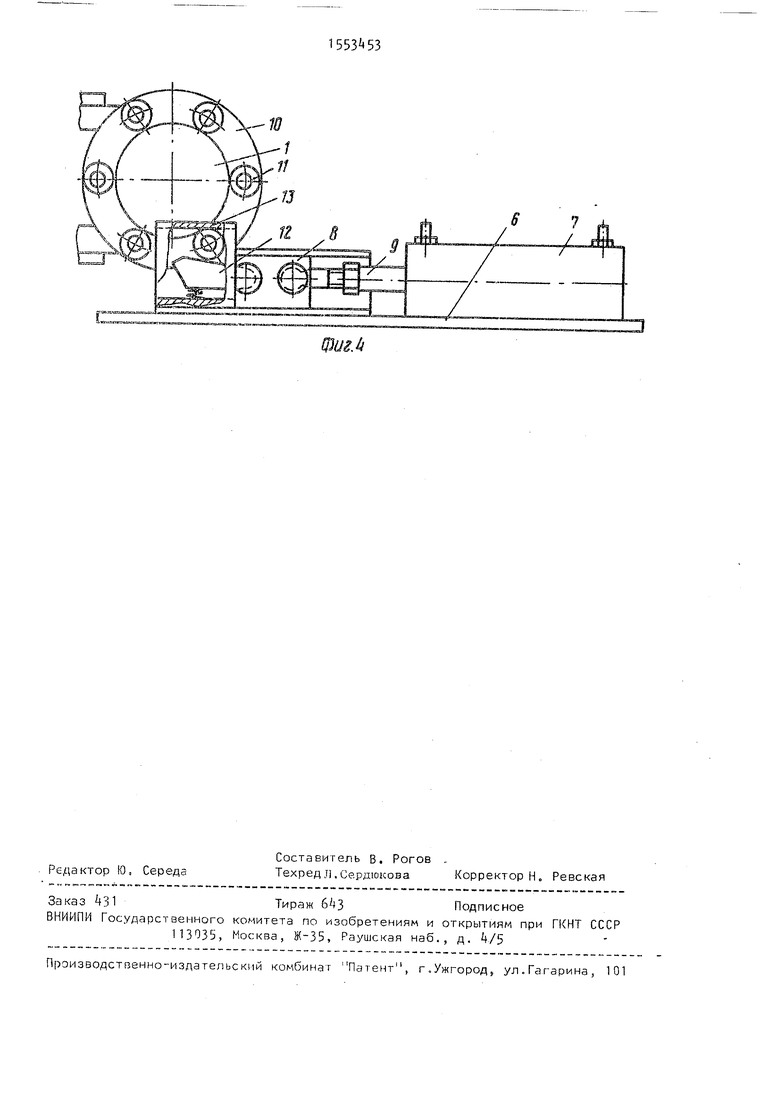
При возвращении ползуна 8 в исходное положение (фиг. k) козырек 13, благодаря его выполнению с возможностью взаимодействия внутренней поверхности с двумя соседними роликами 11, не теряя контакта с предыдущим роликом 11, наезжает на последующий ролик 11, обеспечивая и с ним контакт, тем самым препятствуя перемещению тягового органа k назад. Подпружиненная собачка 12 при дальнейшем движении ползуна тыльной стороной контактирует с последующим роликом 11 и поворачивается под его дей- ствием„ В дальнейшем за счет действия пружины собачка 12 устанавливается в исходное положение, контактируя верхней частью с внутренней поверхностью козырька 13 Далее цикл повторяется„
Формула изобретения
Шаговый конвейер, содержащий установленные на основании ведущий и ведомый поворотные элементы, размещенный на поворотных элементах приводной замкнутый тяговый орган и привод шагового перемещения, о т л и ч а ю- щ и и с я тем, что, с целью повышения надежности работы конвейера, он снабжен связанным с ведущим поворотным элементом и расположенным соосно ему диском с равномерно расположенными на его торце по окружности роликами, установленным с возможностью возвратно-поступательного перемещения по основанию и соединенным с приводом шагового перемещения ползуном с закрепленными на нем козырьком и размещенной под козырьком подпружиненной собачкой, причем козырек установлен с возможностью поочередного
взаимодействия с двумя смежными роликами при рабочем и холостом ходах, при этом подпружиненная собачка при рабочем ходе расположена с возможно,1
стью взаимодействия с козырьком и одним роликом, а при холостом ходе - с последующим за ним по ходу поворота диска другим роликом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для сообщения прерывистого движения тяговому органу | 1986 |
|
SU1388363A1 |
| Привод шагового конвейера | 1987 |
|
SU1523480A1 |
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |
| Устройство для пакетирования бревен и выравнивания их торцов | 1974 |
|
SU602436A1 |
| Грузоведущий конвейер | 1990 |
|
SU1792895A1 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| ШТАНГОВЫЙ СКРЕБКОВЫЙ ТРАНСПОРТЕР | 2006 |
|
RU2310322C1 |
| Устройство для шагового перемещения груза | 1989 |
|
SU1669817A1 |
| РЕВЕРСИВНЫЙ СКРЕБКОВЫЙ ТРАНСПОРТЕР | 2006 |
|
RU2310323C1 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
Изобретение относится к устройствам для шаговых перемещений. Цель - повышение надежности работы конвейера. Для этого на основании установлены ведущий 1 и ведомый 2 поворотные элементы. На элементах 1 и 2 размещен приводной замкнутый тяговый орган 3. На основании закреплен привод 7 шаговых перемещений. На ведущем элементе 1 установлен соосно с ним диск 10 с равномерно расположенными на его торце по окружности роликами 11. С возможностью перемещения по основанию размещен ползун (П) 8, соединенный с приводом 7. На П 8 закреплен козырек 13 и собачка 12. Козырек 13 установлен с возможностью поочередного взаимодействия с двумя смежными роликами 11 при рабочем и холостом ходах. Собачка 12 при рабочем ходе расположена с возможностью взаимодействия с козырьком 13 и роликом 11, а при холостом ходе - с последующим за тем по ходу поворота диска 10 роликом 11. При перемещении П 8 собачка 12 толкает ролик 11 по дуге и в конце хода фиксирует его, прижимая к козырьку 13. Ведущий поворотный элемент 1 поворачивается и перемещает тяговый орган 3 на шаг. При холостом ходе собачка 12 отжимается роликом 11 и возвращается в исходное положение, оставаясь под козырьком 13. 4 ил.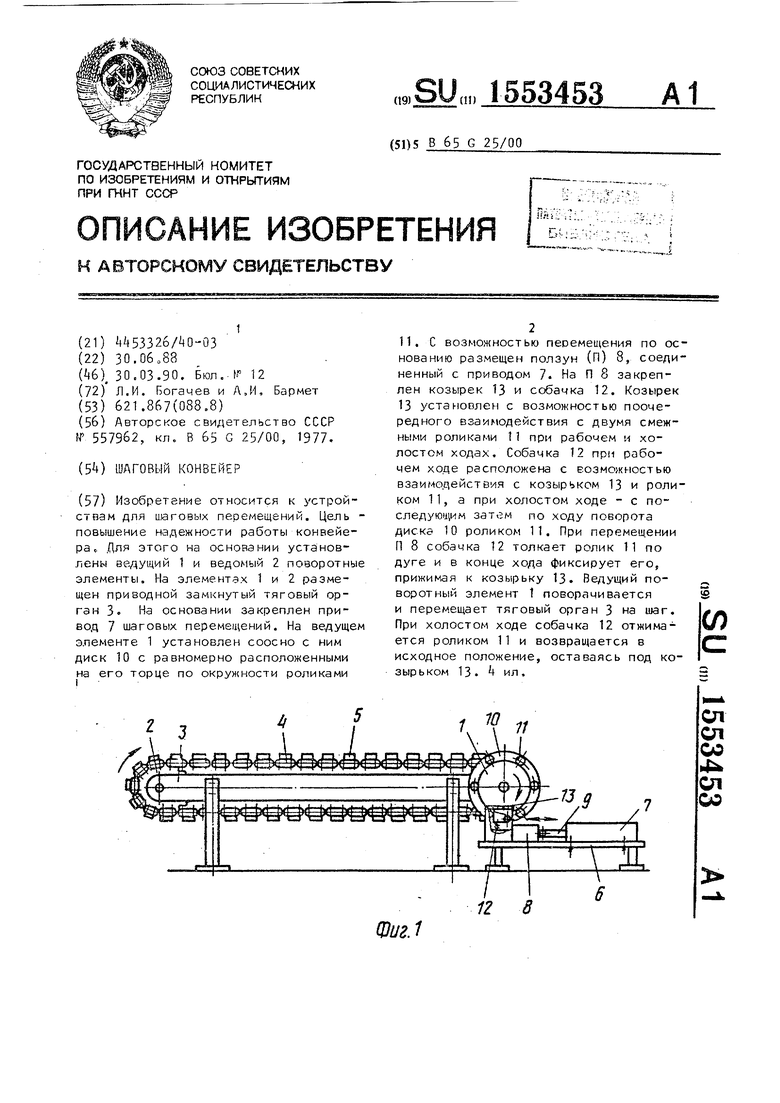
,10
фиг.2
Фиг.з
| Шаговый конвейер | 1973 |
|
SU557962A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| ( ШАГОВЫЙ КОНВЕЙЕР | |||
