Изобретение относится к контролирую щим устройствам, в частности к устройствам для контроля занятости ячейки.
Целью изобретения является повышение надежности за счет обеспечения возможности контроля работоспособности концевого выключателя.
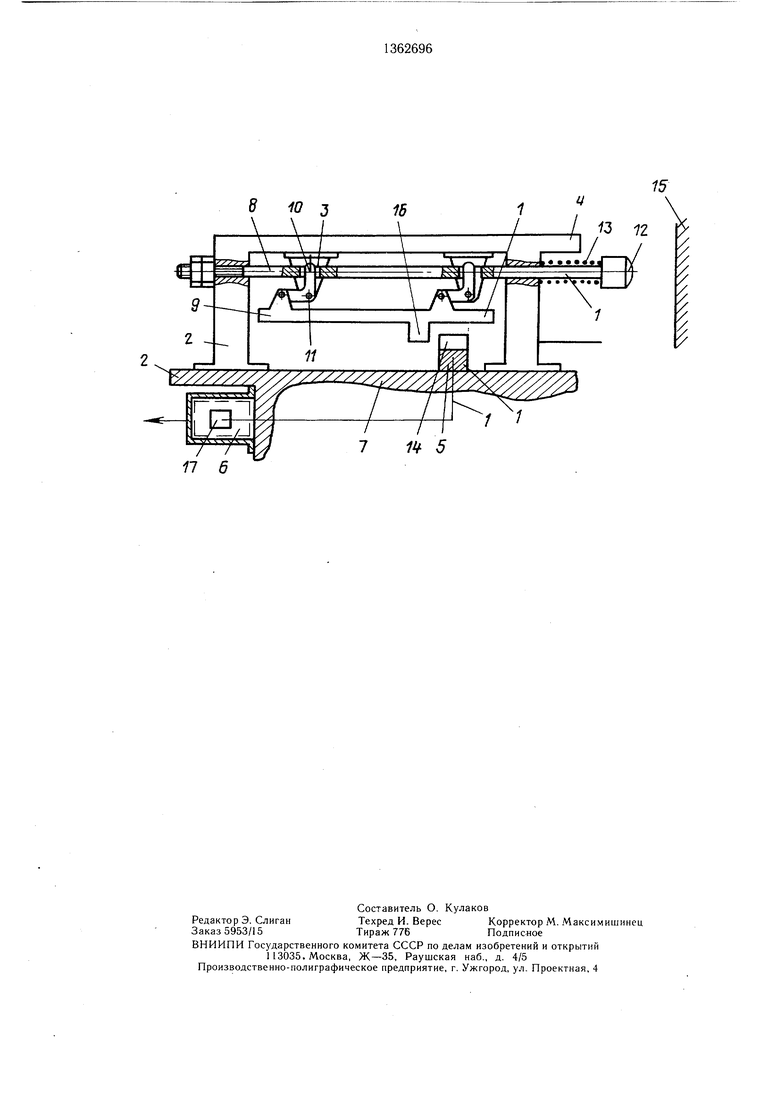
На чертеже представлена конструкция концевого выключателя для реализации предлагаемого способа.
Концевой выключатель 1 для реализации способа смонтирован на раме 2. При этом механическая часть концевого выключателя на кронштейне 3 укреплена к выдвижной платформе 4 рамы 2, а электрическая часть, в частности бесконтактный датчик 5 и электроблок 6, укреплены на стационарной платформе 7 рамы 2. Механическая часть концевого выключателя 1 включает шуп 8 виде штока и шунтирующую пластину 9, связанные между собой парой параллельных L-образных рычагов 10, касаюш,ихся шарнирно на пальцах 11, укрепленных на кронштейнах 3. Рабочий торец 12 щупа 8 расположен впереди выд- вижной платформы 4 (на чертеже направление выдвижения платформы 4 вправо).
Исходное взведенное положение шупа 8 относительно платформы 4 фиксируется пружиной 13. Шунтируюш.ая пластина 9 расположена над пазом 14 датчика 5, и кинематика связи ее с шупом 8 выполнена так, что если при выдвижении платформы 4 торец 12 шупа 8 упрется в препятствие 15, то при продолжении выдвижения платформы 4 L-образные рычаги 10 повернутся и шунтирующая пластина 9 опустится в паз 14 датчика 5.
Для реализации способа к пластине 9 перед пазом 14 и на уровне паза 14 укреплен флажок 16, и в электроблок 6 введен элемент 17 памяти, который зафиксирует поступление кратковременного проходного сигнала от датчика 5.
Устройство работает следующим образом.
В начале выдвижения платформы 4 рамы 2 флажок 16 пластины 9 проходит сквозь паз 14 концевого выключателя 1, который выдает кратковременный сигнал в электроблок 6. Последний фиксирует этот сигнал элементом 17 памяти.
Этот сигнал свидетельствует об исправности датчика при контроле данной ситуации.
В последующем, если щуп 8 встречает препятствие, например препятствие 15, тогда подается продолжительный сигнал на систему управления. Если же при последующем движении щуп 8 не встречает препятствие, тогда система управления с учетом проведенного контроля работоспособности концевого выключателя 1 не отменяет
0
осуществление последующих операций. Возможность возникновения аварийной ситуации при этом весьма маловероятна и связана лишь с тем, что именно в момент
срабатывания в данном цикле концевой выключатель 1 может выйти из строя.
В описанном примере осуществления обязательно при любой ситуации имеет место кратковременный проходной сигнал от конечного выключателя, затем следует интервал времени, когда сигнал отсутствует, после чего в случае ситуации «Занято возникает вторичный длительный сигнал от конечного вЬ ключателя, который при наличии первого сигнала достоверно свидетельствует о ситуа5 ции «Занято : Таким образом, в данном примере осуществления ситуация «Свободно определяется не сразу после исчезновения контрольного сигнала, а в интервале, когда отсутствует вторичный длительный сигнал «Занято.
0
Формула изобретения
1.Способ контроля положения объекта, перемещаемого из начального положения в
5 конечное, основанный на регистрации сигнала, соответствующего срабатыванию концевого выключателя, состоящего из подвижной, закрепленной на перемещаемом объекте, и неподвижной частей, отличающийся тем, что, с целью повышения надежности спосо0 ба за счет снижения вероятности прохождения ложных сигналов концевого выключателя, регистрируют контрольный сигнал срабатывания концевого выключателя в промежуточном положении объекта.
2.Способ по п. 1, отличающийся тем, 5 что контрольный сигнал срабатывания концевого выключателя формирует путем взаимодействия его подвижной и неподвижной частей в промежуточном положении объекта.
3.Концевой выключатель, состоящий из подвижной части, закрепленной на объекте, перемещаемом из начального положения в конечное, и неподвижного чувствительного элемента, подвижная часть закреплена на объекте с возможностью взаимодействия с чувствительным элементом в конечном по5 ложении объекта, отличающийся тем, что, с целью повышения надежности за счет обеспечения возможности контроля работоспособности концевого выключателя, подвижная часть концевого выключателя снабжена выступом для взаимодействия с чувст0 вительным элементом в промежуточном положении объекта.
4.Концевой выключатель по п. 3, отличающийся тем, что подвижная часть концевого выключателя содержит щуп и водило, кинематически соединенные осью и упру5 гим элементом.
0
7 7
11 б
| название | год | авторы | номер документа |
|---|---|---|---|
| Концевой выключатель | 1989 |
|
SU1733345A2 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1000353A1 |
| Устройство для укладки листов в пирамиду | 1989 |
|
SU1776644A1 |
| Телескопический грузозахват | 1989 |
|
SU1671550A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1341122A2 |
| Устройство для контроля наличия и положения упаковываемых изделий | 1982 |
|
SU1047781A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1034929A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1512873A1 |
| Устройство для ориентации платформы стеллажного крана-штабелера | 1982 |
|
SU1071535A1 |
| Устройство для контроля занятости ячейки стеллажного крана-штабелера | 1974 |
|
SU567648A1 |
Изобретение относится к контролирующим устройствам, в частности к устройствам для контроля занятости ячейки. Цель изобретения - повышение надежности за счет обеспечения возможности контроля работоспособности концевого выключателя. Предложенные способ и устройство для его осуществления предусматривают наличие в мащине конечного выключателя, который регистрирует ситуацию «Занято продолжительным включением датчика. Новым в предложенных способе и устройстве для его реализации является то, что выключателю придана самоконтрольная функция за счет того, что ситуацию «Свободно механически регистрируют последовательно с проходным включением датчика, кратковременный сигнал которого или непосредственно используют как ключ для прохождения сигнала «Свободно, или контролируют фильтром по предельно допустимым временным показателям прохождения, а прощедщие фильтр сигналы используют для выработки сигнала «Разрешение последующих действий исполнительных органов на систему управления. 2 с. и 2 з. п. ф-лы, 1 ил. сл со О5 N3 05 СО Oi