(Л
.со
О5 4 4
О5
оо
Изобретение относится к манипуляторо- строению и роботостроению и может быть использовано в машиностроении.
Целью изобретения является повышение точности позиционирования и расширение технологических возможностей за счет координатных перемещений в плоскости.
На фиг. 1 представлен манипулятор; на фиг. 2 - кинематическая схема манипулятора; на фиг. 3 - разрез А-А на фиг. 1.
Манипулятор содержит основание 1, функциональные звенья (например, в количестве трех), выполненные в виде эксцентриковых платформ 2-4. Двигатели 5-7 и передачи 8-13 служат для прида- ния вращения платформам. Платформы сопряжены между собой и с основанием круговыми подвижными опорами 14-16, например, качения. Схват 17 прикреплен к внутренней платформе с возможностью ротации от двигателя 18 через зубчатую передачу 19 и 20 и продольного перемещения от двигателя 21 через коническую зубчатую передачу 22 и 23 и реечную передачу 24 и 25.
Манипулятор работает следующим образом.
При поступлении сигналов на отработку приводами манипулятора степеней подвижности эксцентриковые платформы 2-4 получают вращательное движение от двигателей 5-7 через зубчатые передачи 8-13. Платформы вращаются относительно основания 1 и друг относительно друга. Так как платформы 2 и 3 имеют эксцентриситеты ei и еа, а схват 17 прикреплен к платформе 4 с .эксцентриситетом ез, то вращение платформ приводит к перемещению схвата по плоскости.
т.е. происходит его позиционирование в плоскости. Продольное перемещение схвата, т.е. позиционирование его в перпендикулярном к плоскости платформ направлении, о существляется от двигателя 21 через коническую зубчатую передачу 22 и 23 и реечную передачу 24 и 25. Двигатель 18 осуществляет ротацию схвата 17 через зубчатую передачу 19 и 20.
Применение функциональных звеньев в
виде эксцентрических полноповоротных платформ позволяет повысить технологические возможности и точность манипулятора за счет получения полной рабочей зоны и за счет уменьшения дискрет и ошибок позиционирования схвата. Кроме того, сопряжение звеньев круговыми подвижными опорами обеспечивает жесткость на охвате, что дополнительно увеличивает точность позиционирования.
Формула изобретения
Манипулятор, содержащий основание, звенья, последовательно соединенные между собой, схват и приводы звеньев и схвата, отличающийся тем, что, с целью повышения точности позиционирования и расширения технологических возможностей за счет координатных перемещений в плоскости, звенья выполнены в виде эксцентриковых платформ, расположенных одна внутри другой, имею- щих возможность полного поворота вокруг своих осей и сопряженных соответственно друг с другом и одной из них с Основанием посредством дополнительно введенных круговых опор, а к внутренней платформе прикреплен схват.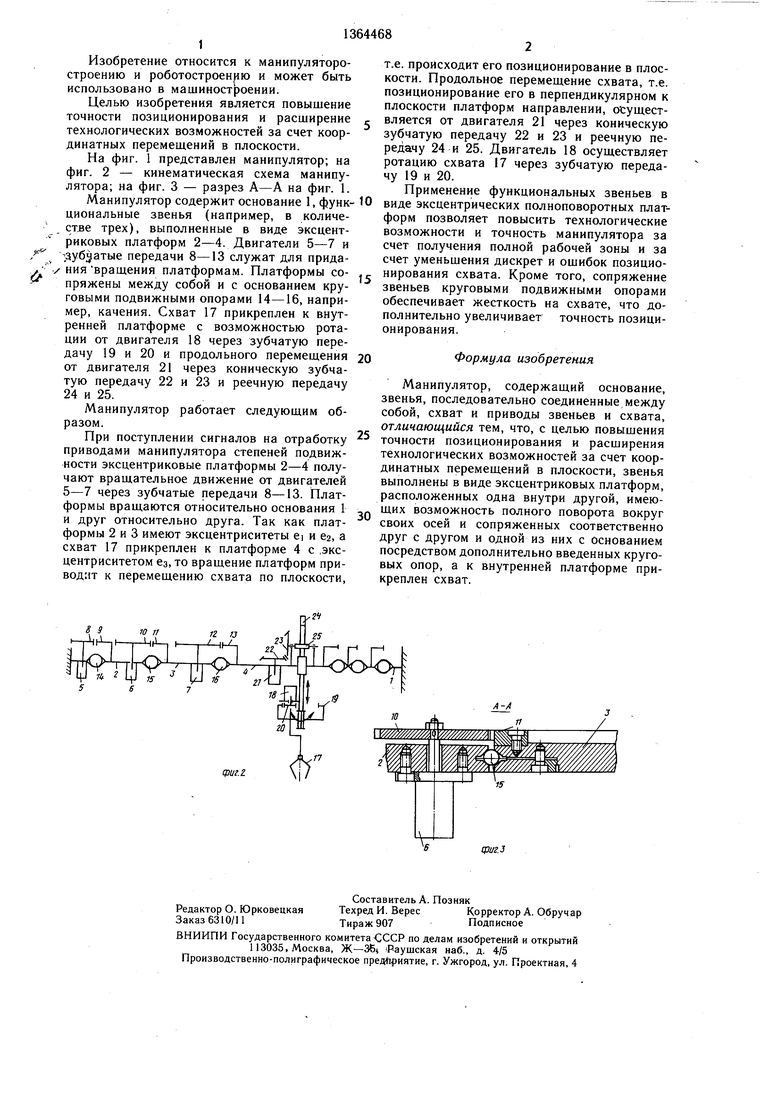
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1985 |
|
SU1337253A1 |
| Манипулятор для плоских стеклоизделий | 1987 |
|
SU1549743A1 |
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Манипулятор модульного типа | 1988 |
|
SU1558663A1 |
| Промышленный робот | 1987 |
|
SU1537514A1 |
| Способ автоматической подачи заготовок в технологическое оборудование и устройство для его осуществления | 1984 |
|
SU1301690A1 |
| Подвесной манипулятор | 1983 |
|
SU1271737A1 |
Изобретение относится к манипулято- ростроению и роботостроению и может быть использовано в машиностроении. Цель изобретения - повышение точности позиционирования и расширение технологических возможностей за счет координатных переме- ш.ений в плоскости. При поступлении сигналов на обработку эксцентриковые платформы 2, 3, 4 получают вращательное движение от соответствующих двигателей через зубчатые пары 8-9; 10-11; 12-13. Платформы вращаются относительно основания 1 и друг относительно друга. Так как платформы 2 и 3 имеют эксцентриситеты ei и eg, а схват прикреплен к платформе 4 с эксцентриситетом ез, то вращение платформ приводит к перемещению схвата по плоскости, т.е. происходит его позиционирование в плоскости. 3 ил.
q:iui.Z
/
tpui3
| Андре П., Кофман Ж | |||
| М | |||
| и др | |||
| Конструирование роботов.- М.: Мир, 1986, с | |||
| Автоматическая акустическая блокировка | 1921 |
|
SU205A1 |
