Изобретение относится к машиностроению, а именно к манинуляторам для автоматизации работ, содержащих ручные, вспомогательные, монтажные, ногрузочно-разгрузочные, подъемно-транспортные и другие работы.
Цель изобретения - повышение точности позиционирования и упрощение устройства управления манипулятором за счет использования цри позиционировании только вращательного движения.
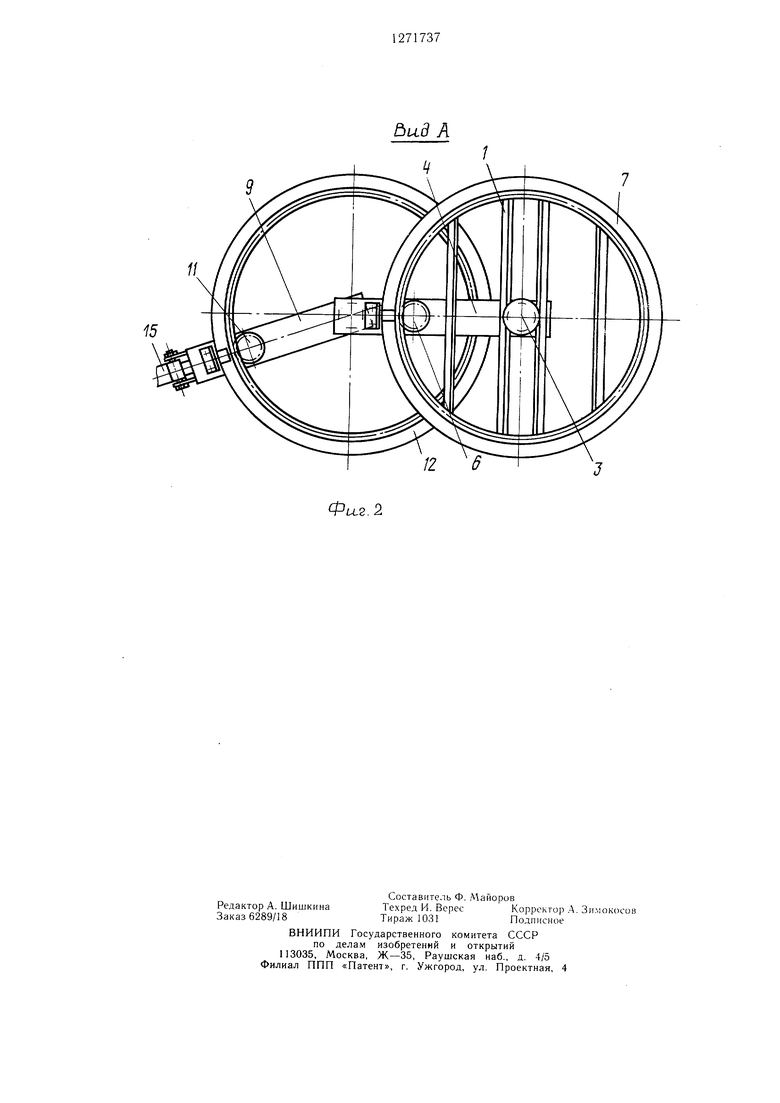
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - вид А на фиг.1.
Подвесной манипулятор содержит портал 1 с кареткой 2, на которой установлено с возможностью поворота вокруг оси 3 первое звено 4 с приводом его перемещения, включающим двигатель 5 с шестерней 6 на его валу и кольцо 7 с зубчатым внутренним венцом, жестко связанное с кареткой 2. На первом звене 4 установлено на оси 8 с возможностью поворота в плоскости, параллельной плоскости поворота первого звена 4, второе звено 9 с приводом его перемещения, включающим двигатель 10 с шестерней 11 на его валу и кольцо 12 с зубчатой внутренней поверхностью, установленное на первом звене 4 соосно с осью 8 поворота и жестко связанное с этим звеном.
Манипулятор также содержит два параллельных механизма 13 и 14, основное звено каждого из которых расположено соответственно на корпусе 15 схвата и на втором звене 9, а звенья параллелограммных механизмов, расположенные параллельно основным звеньям, жестко связаны между собой. Схват содержит привод его перемещения, включающий двигатель 16, установленный на втором звене 9, и червячную передачу, червяк которой связан с валом двигателя 16, а щестерня - с корпусом 15 схвата. Кроме того, оси 3 и 8 связаны с датчиками 17 и 18 угла поворота соответственно первого 4 и второго 9 звеньев, а датчик 19 - с шестерней червячной передачи.
Подвесной манипулятор работает следующим образом.
В вертикальной плоскости перемещение схвата происходит с помощью параллелограммных механизмов 13 и 14 от двигателя 16 через червячную передачу на радиус действия R этого механизма, при этом угол наклона схвата остается неизмершым.
Горизонтальное перемещение осуществляется при включении двигателей 5 или 10 приводов первого н второго звеньев, совершающих поворот вокруг осей 3 и 8 соответственно. Информация о положении схвата поступает в устройство управления манипулятором (не показано) с датчиков 17-19 угла поворота.
Формула изобретения
10
Подвесной манипулятор, содержащий портал с кареткой, на которой установлена рука, включающая два связанных между собой с возможностью поворота звена с приводами их перемещения и схват, корпус которого через привод его перемещения связан с вторым звеном, отличающийся тем, что, с целью повышения точности позиционирования и упрощения устройства управления,
он снабжен тремя датчиками угла поворота, двумя параллелограммными механизмами, основное звено каждого из которых расположено соответственно на корпусе схвата и на втором звене руки манипулятора, а звенья параллелограммных механизмов, расположенные параллельно основным звеньям, жестко связаны между собой, при этом конец первого звена руки манипулятора установлен на каретке с возможностью поворота в плоскости, параллельной плоскости взаимного поворота звеньев, а привод каждого из звеньев выполнен в виде кольца с внутренней зубчатой поверхностью и двигателя с шестерней на его валу, установленного с возможностью взаимодействия зубцов шестерни и кольца, при этом кольцо привода первого звена установлено на каретке соосно оси его вращения и жестко связано с ним, а двигатель этого привода установлен на первом звене, кольцо привода второго звена установлено на первом звене соосно оси их взаимного поворота и жестко
связано с ним, а двигатель этого привода установлен на втором звене, привод перемещения схвата включает двигатель, установленный на втором звене, и червячную передачу, червяк которой связан с валом двигателя, а шестерня - со схватом, при
этом датчики угла поворота связаны соответственно с осями поворота звеньев и шестерней червячной передачи.
Фи-2.2
bud А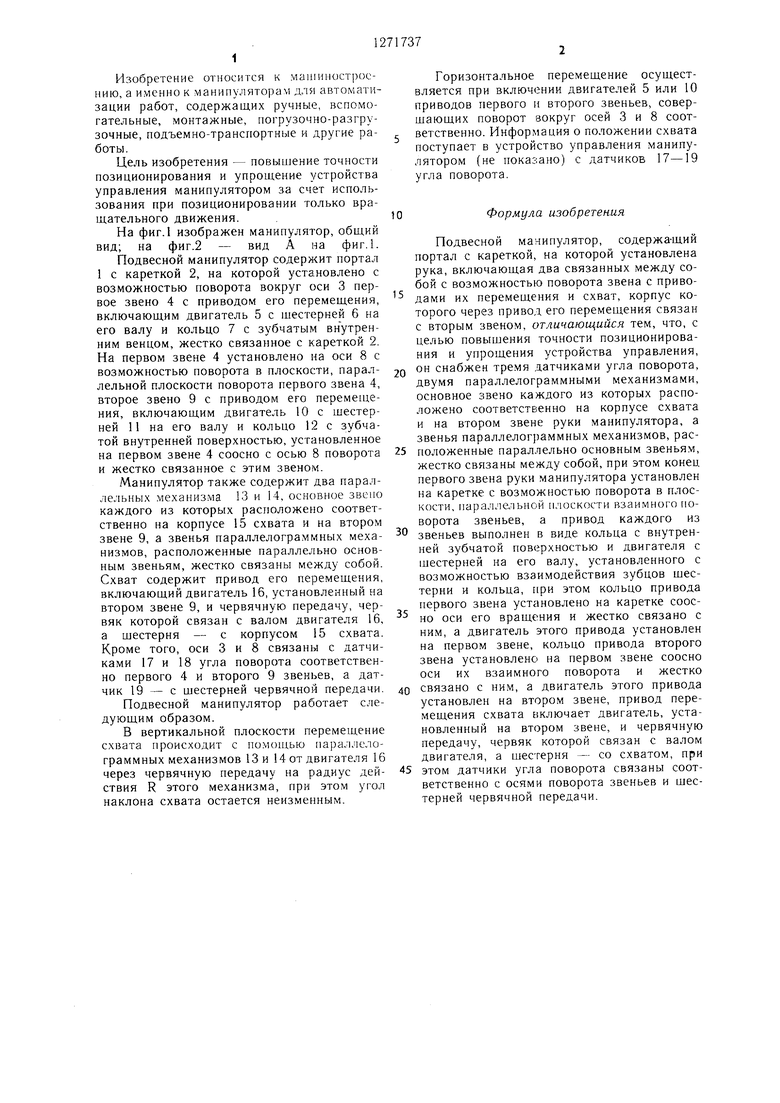
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022769C1 |
| Манипулятор | 1984 |
|
SU1192969A1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Манипулятор | 1983 |
|
SU1122502A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
Изобретение относится к области машиностроения. Цель изобретения - повышение точности пространственного позиционирования и упрощение устройства управления. Подвесной манипулятор содержит портал 1 с верхней кареткой 2, руку, выполненную в виде ряда последовательно связанны.х звеньев 4 н 9, схват и приводы в виде кольца 7. Портал снабжен круговыми направляюшими, нижней кареткой с круговыми направляющими в виде кольца 12 и с приводом, манипулятор содержит два четырехзвенных механизма 13 и 14, имеющих жесткую связь между собой. Звенья манипулятора снабжены круговыми датчиками обратной связи, которые фиксируют реальные положения осей поворота этих звеньев. 2 ил. (Л to со 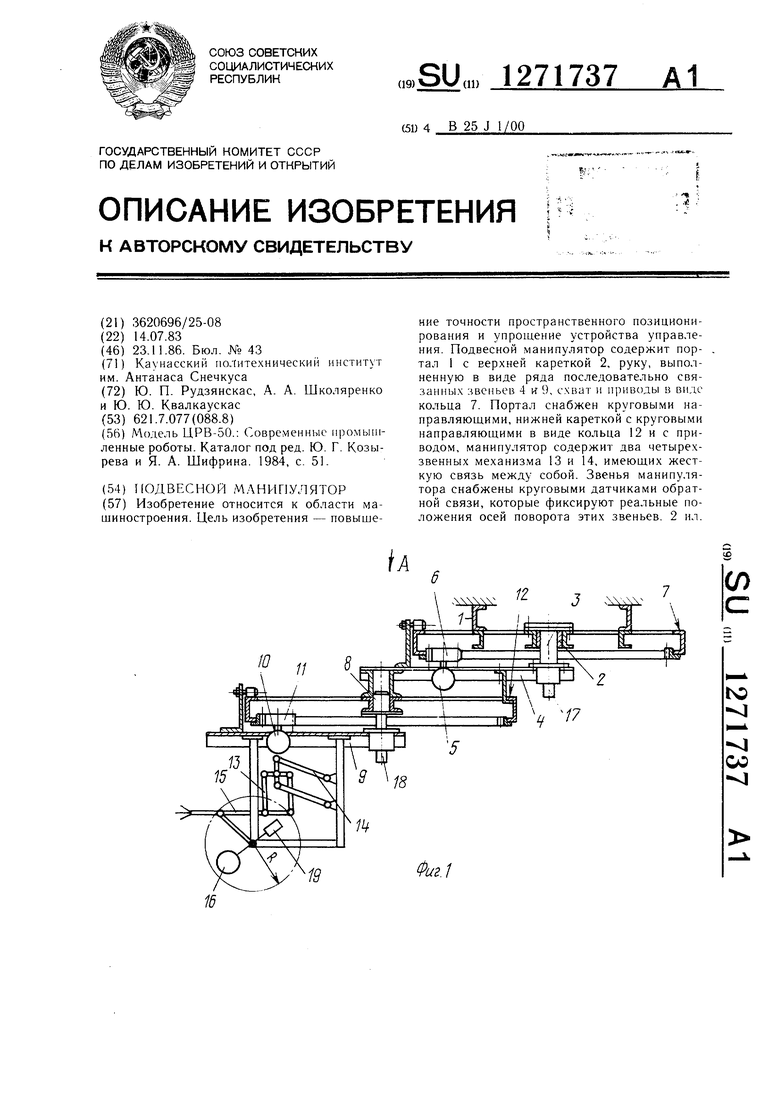
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Каталог под ред | |||
| Ю | |||
| Г | |||
| Козырева и Я | |||
| А | |||
| Шифрина | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
