(Л
.l
СО J
Si
Изобретение относитс я к машиностроению, в частности к захватным устройствам промышленных роботов.
Цель изобретения - расширение технологических возможностей.
На фиг. 1 представлено захватное устройство при захвате детали по наружной поверхности, обш,ий вид; на фиг. 2 - то же, при захвате детали по внутренней поверхности; на фиг. 3 - сечение А-А на фиг. 2.
Захватное устройство смонтировано на руке 1 и содержит приводной механизм поступательного действия, состояший из неподвижного 2 и подвижного 3 элементов. Подвижный элемент 3 связан с приводным штоком 4 и имеет сквозные направляюшие пазы 5. Захват снабжен змеевидно изогнутыми упругими элементами 6, у которых в средней части участков между перегибами выполнены прорези 7. Посредством прорезей 7 змеевидно изогнутые упругие элементы 6 установлены в направляющих пазах 5 подвижного элемента 3. Концы элементов 6, направленные к приводному механизму, жестко закреплены на неподвижном элементе 2, а концы, направленные в сторону зева захвата, закреплены на подвижном элементе 3. Возможен захват детали 8 как по наружной (фиг. I), так и по внутренней (фиг. 2) поверхности.
Фи2.2.
0
5
Устройство работает следуюш,им образом.
Рука 1 промышленного робота вводит захватное устройство в рабочую зону. При включении привода усилие передается через приводной шток 4 на подвижный элемент 3, который поступательно перемещается по направлению к руке 1. Змеевидно изогнутые упругие элементы 6 сжимаются в осевом направлении и воздействуют перегибами на деталь 8, захватывая ее. При движении, подвижного элемента 3 в обратную сторону змеевидно изогнутые упругие элементы б освобождают деталь 8.
Формула изобретения
Захватное устройство, содержащее два телескопически установленных звена, размещенных с возможностью взаимного относительного осевого перемещения от приводного механизма, на первом из этих звеньев закреплены одним из своих концов змеевидно изогнутые упругие элементы, отличающееся тем, что, с целью расширения технологических возможностей, в средней части участков между перегибами змеевидно изогнутых упругих элементов выполнены прорези, в которых расположены направляющие, закрепленные на одном из телескопически установленных звеньев, а другой конец змеевидно изогнутых упругих элементов закреплен на втором звене.
А-А
Фи.3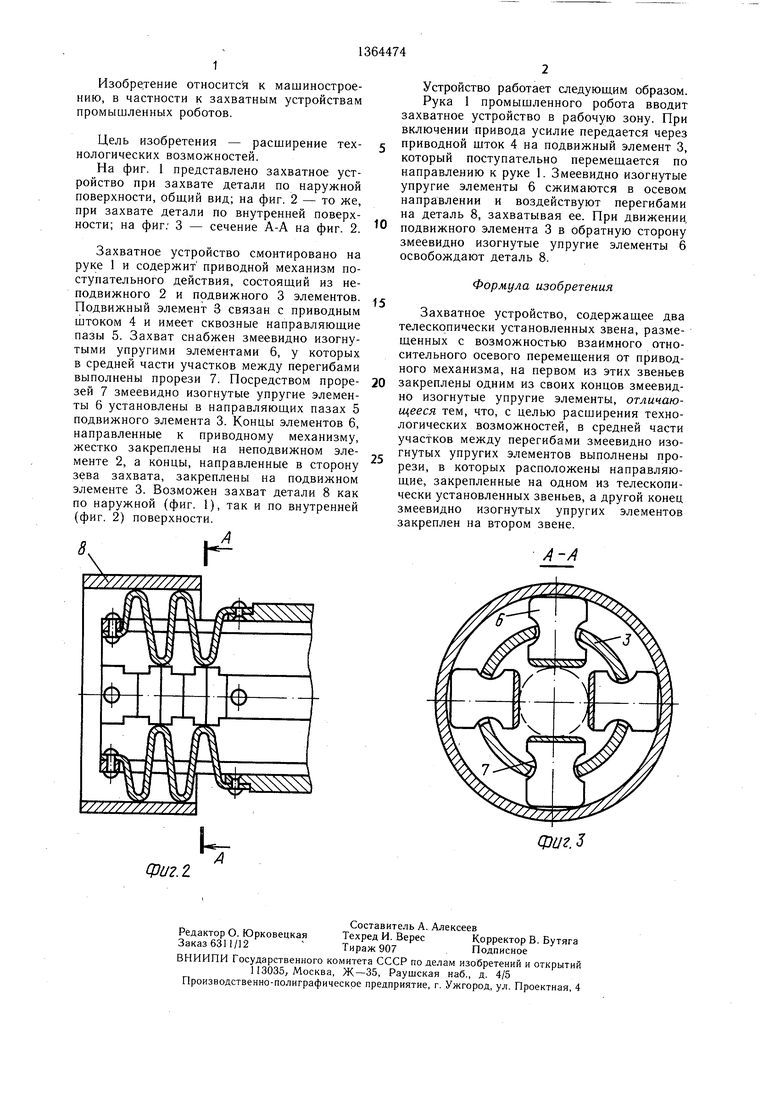
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1986 |
|
SU1366393A1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| ЗАХВАТ | 1992 |
|
RU2043916C1 |
| Захват промышленного робота | 1978 |
|
SU768634A1 |
| Захват промышленного робота | 1979 |
|
SU781056A2 |
| Захватное устройство | 1989 |
|
SU1743853A2 |
| Захватное устройство для мягких деталей | 1990 |
|
SU1811482A3 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2022782C1 |
| Захватное устройство | 1988 |
|
SU1521582A1 |
| Захват промышленного робота | 1983 |
|
SU1110628A2 |
Изобретение относится к области машиностроения, в частности к захватным устройствам промышленных роботов. Целью изобретения является расширение технологических возможностей. Рука I промышленного робота вводит захватное устройство в рабочую зону. При включении привода усилие передается через приводной шток 4 на подвижный элемент 3, который, поступательно перемеш,аясь, сжимает змеевидно изогнутые упругие элементы 6 в осевом направлении, последние воздействуют перегибами на деталь 8, захватывая ее. 3 ил.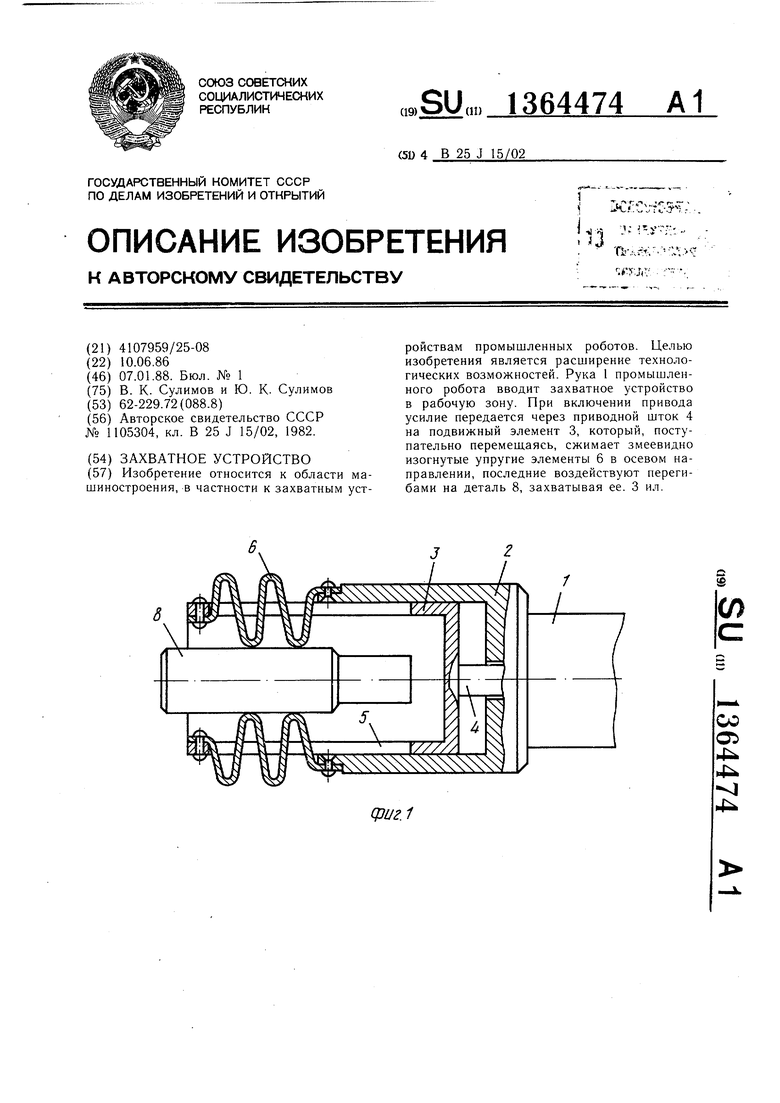
| Захват промышленного робота | 1982 |
|
SU1105304A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
