(21)4055873/25-08
(22)14.04,86
(46)15.01.88. Бюл. № 2
(75)В.К.Сулимов к Р.Б.Гевко
(53)621-229.77 (088.8)
(56)Авторское свидетельство СССР № 417272, кл. В 25 J 15/00, 1972.
(54)СХВАТ МАНИПУЛЯТОРА
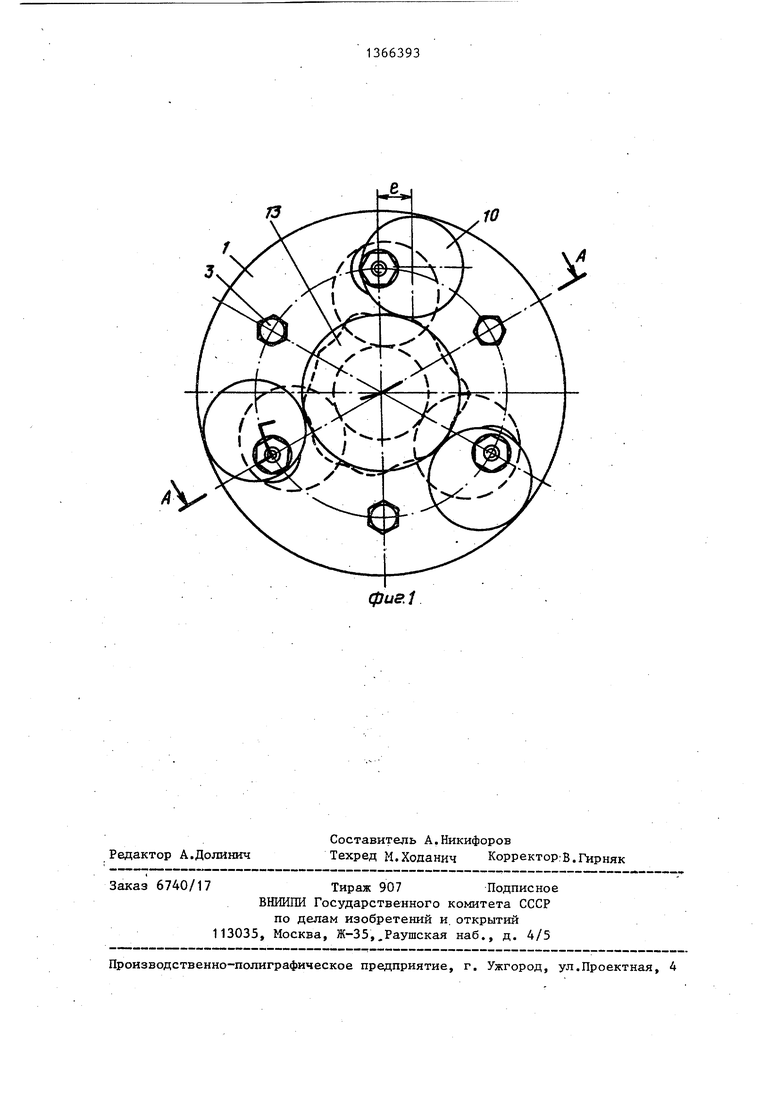
(57)Изобретение относится .к области машиностроения,, а именно к захватным устройствам промьшшенных роботов. Изобретение позволяет повысить надежность захвата деталей, имеющих отклонения от правильной геометрической формы. В корпусе, выполненном из двух частей 1 и 2, скрепленных болтами 3, размещено поворотное кольцо 4, кинематически связанное с поворотными элементами 6. Каждьш захватный рычаг выполнен в виде оси 7 и установлен с возможностью поворота и перемещения в поворотном элементе 6, а каждая губка - в виде эксцентрично расположенного относительно оси 7 цилиндрического кулачка 10, соединенного с поворотным элементом 6 пружиной скручивания 9. 2 ил.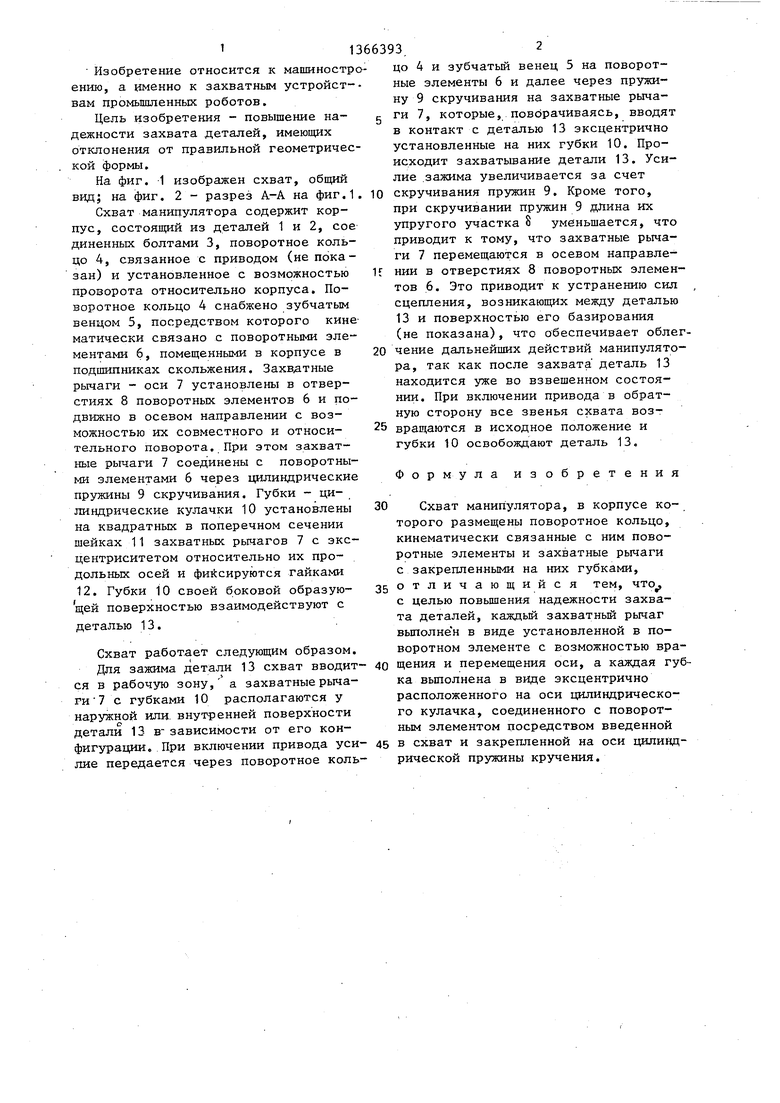
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1986 |
|
SU1350004A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Схват манипулятора | 1985 |
|
SU1255427A1 |
| Кистевой узел манипулятора | 1990 |
|
SU1712142A1 |
| Схват манипулятора | 1986 |
|
SU1390019A1 |
| Схват | 1987 |
|
SU1511114A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Схват промышленного робота | 1983 |
|
SU1098789A1 |
70- /Л
с
(Л
со
Crs
о: со со со
/J
фиг.2
Изобретение относится к мапиностро- ению, а именно к захватным устройст-- вам промьшшенных роботов.
Цель изобретения - повышение надежности захвата деталей, имеющих отклонения от правильной геометрической формы.
На фиг. 1 изображен схват, общий вид; на фиг. 2 - разрез А-А на фиг.1.
Схват манипулятора содержит корпус, состоящий из деталей 1 и 2, сое диненных болтами 3, поворотное кольцо 4, связанное с приводом (не показан) и установленное с возможностью проворота относительно корпуса. Поворотное кольцо 4 снабжено зубчатым венцом 5, посредством которого кинематически связано с поворотными элементами 6 помещенньши в корпусе в Подшипниках скольжения. Захвдтные рычаги - оси 7 установлены в отверстиях 8 поворотных элементов 6 и подвижно в осевом направлении с возможностью их совместного и относительного поворота. При этом захватные рычаги 7 соединены с поворотными элементами 6 через цилиндрические 9 скручивания. Губки - цилиндрические кулачки 10 установлены на квадратных в поперечном сечении шейках 11 захватных рычагов 7 с эксцентриситетом относительно их продольных осей и фиксируются гайками 12. Губки 10 своей боковой образующей поверхностью взаимодействуют с деталью 13.
Схват работает следующим образом.
цо 4 и зубчатый венец 5 на поворотные элементы 6 и далее через пружину 9 скручивания на захватные рыча- g ги 7, которые, поворачиваясь, вводят в контакт с деталью 13 эксцентрично установленные на них губки 10. Происходит захватывание детали 13. Усилие .зажима увеличивается за счет
10 скручивания пружин 9. Кроме того, при скручивании пружин 9 длина их упругого участка 8 уменьшается, что приводит к тому, что захватные рычаги 7 перемещаются в осевом направлеU НИИ в отверстиях 8 поворотных элементов 6. Это приводит к устранению сил сцепления, возникающих между деталью 13 и поверхностью его базирования (не показана), что обеспечивает облег20 чение дальнейших действий манипулятора, так как после захвата деталь 13 находится уже во взвешенном состоянии. При включении привода в обратную сторону все звенья схвата воз25 вращаются в исходное положение и губки 10 освобождают деталь 13.
Формула изобретения
30
Схват манипулятора, в корпусе которого размещены поворотное кольцо, кинематически связанные с ним поворотные элементы и захватные рычаги с закрепленными на них губками, 35 отличающийся тем, что. с целью повьшения надежности захвата деталей, каждьй захватный рычаг вьшолне н в виде установленной в поворотном элементе с возможностью враДля зажима детали 13 схват вводит-40 щения и перемещения оси, а каждая губ- ся в рабочую зону, а захватные рыча- ка вьшолнена в виде эксцентрично ги 7 с губками 10 располагаются у расположенного на оси цилиндрическо- наружной или. внутренней поверхности го кулачка, соединенного с поворот- детали 13 в зависимости от его кон- ным элементом посредством введенной
фигурации. При включении привода уси-45 в схват и закрепленной на оси цилинд- лие передается через поворотное кольрической пружины кручения.
цо 4 и зубчатый венец 5 на поворотные элементы 6 и далее через пружину 9 скручивания на захватные рыча- ги 7, которые, поворачиваясь, вводят в контакт с деталью 13 эксцентрично установленные на них губки 10. Происходит захватывание детали 13. Усилие .зажима увеличивается за счет
скручивания пружин 9. Кроме того, при скручивании пружин 9 длина их упругого участка 8 уменьшается, что приводит к тому, что захватные рычаги 7 перемещаются в осевом направлеНИИ в отверстиях 8 поворотных элементов 6. Это приводит к устранению сил сцепления, возникающих между деталью 13 и поверхностью его базирования (не показана), что обеспечивает облегчение дальнейших действий манипулятора, так как после захвата деталь 13 находится уже во взвешенном состоянии. При включении привода в обратную сторону все звенья схвата возвращаются в исходное положение и губки 10 освобождают деталь 13.
Формула изобретения
Схват манипулятора, в корпусе которого размещены поворотное кольцо, кинематически связанные с ним повоотные элементы и захватные рычаги с закрепленными на них губками, отличающийся тем, что. с целью повьшения надежности захвата деталей, каждьй захватный рычаг вьшолне н в виде установленной в пов схват и закрепленной на о
рической пружины кручения.
0
10
фиа1
