сд
ГС
ел
00 N5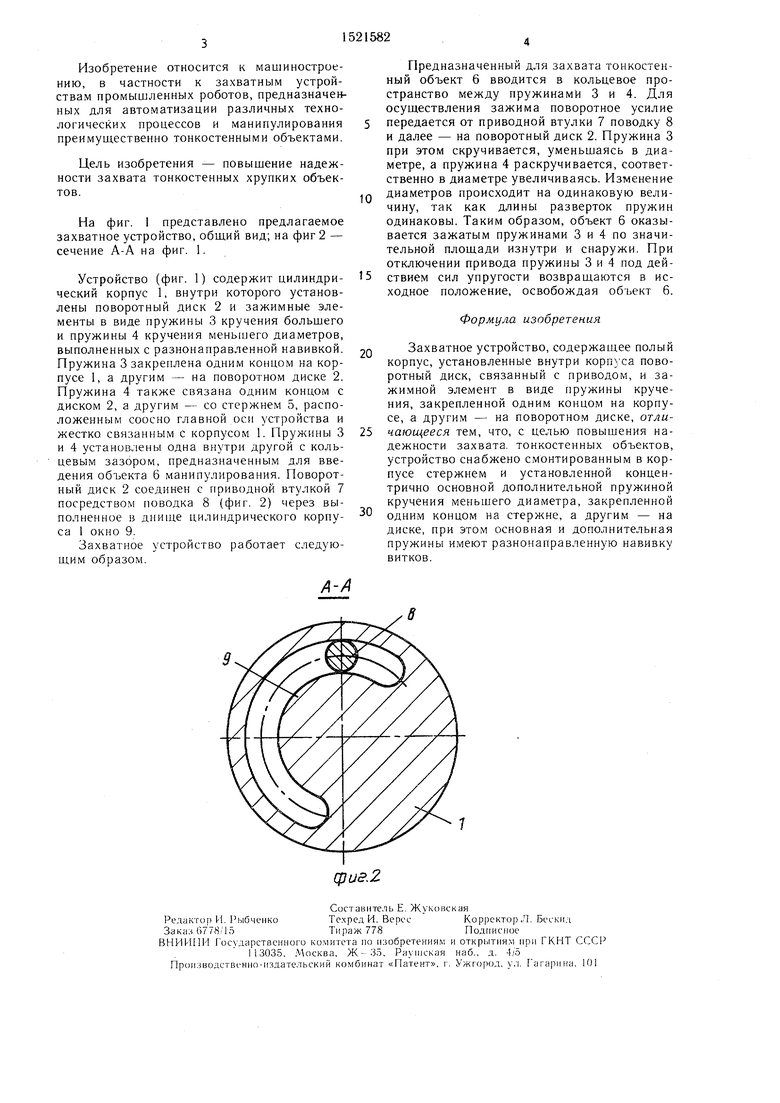
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Схват манипулятора | 1986 |
|
SU1366393A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Многопозиционное зажимное устройство | 1981 |
|
SU975305A1 |
| Захватное устройство | 1981 |
|
SU971647A1 |
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
| Многостержневая авторучка | 1983 |
|
SU1134402A1 |
| Устройство для непрерывной навивки спиралей шнеков | 1988 |
|
SU1563807A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| Захватное устройство | 1988 |
|
SU1549748A1 |
Изобретение относится к машиностроению, в частности к захватным устройствам промышленных роботов. Цель изобретения - повышение надежности захвата тонкостенных объектов. Устройство имеет полый корпус 1, внутри которого установлены поворотный диск 2, стержень 5, зажимные элементы в виде концентрично расположенных пружин кручения 3 и 4 большего и меньшего диаметров, которые имеют разнонаправленную навивку витков. Каждая из пружин связана одним концом с поворотным диском 2, а другим - с неподвижными частями корпуса 1. Усилие привода на пружины передается через приводную втулку 7, поводок 8 и поворотный диск 2. При захвате объекта 6 пружина 3 скручивается, а пружина 4 раскручивается, зажимая объект 6 по значительной площади изнутри и снаружи. 2 ил.
(puS.i
Изобретение относится к машиностроению, в частности к захватным устройствам промышленных роботов, предназначенных для автоматизации различных технологических процессов и манипулирования преимуш.ественно тонкостенными объектами.
Цель изобретения - повышение надежности захвата тонкостенных хрупких объектов.
На фиг. 1 представлено предлагаемое захватное устройство, обш.ий вид; на фиг 2 - сечение А-А на фиг. 1.
Устройство (фиг. 1) содержит цилиндрический корпус 1, внутри которого установлены поворотный диск 2 и зажимные элементы в виде пружины 3 кручения большего и пружины 4 кручения меньшего диаметров, выполненных с разнонаправленной навивкой. Пружина 3 закреплена одним концом на корпусе 1, а другим - на поворотном диске 2. Пружина 4 также связана одним концом с диском 2, а другим - со стержнем 5, расположенным соосно главной оси устройства и жестко связанным с корпусом 1. Пружины 3 и 4 установлены одна внутри другой с кольцевым зазором, предназначенным для введения объекта 6 манипулирования. Поворотный диск 2 соединен с приводной втулкой 7 посредством поводка 8 (фиг. 2) через выполненное в днище цилиндрического корпуса 1 окно 9.
Захватное устройство работает следующим образом.
А-А
фиг.2
Составитель Е. Жуковская
Релакто) И. РыбчсикоТехред И. ВересКорректор/. Бескил
Зака;И 778/1оТираж 778Полписное
ВНИППИ Государственного комитета по м; обретения.м и открытиям прп ГКНТ СССР
0
5
0
5
0
Предназначенный для захвата тонкостенный объект 6 вводится в кольцевое пространство между пружинами 3 и 4. Для осуществления зажима поворотное усилие передается от приводной втулки 7 поводку 8 и далее - на поворотный диск 2. Пружина 3 при этом скручивается, уменьшаясь в диаметре, а пружина 4 раскручивается, соответственно в диаметре увеличиваясь. Изменение диаметров происходит на одинаковую величину, так как длины разверток пружин одинаковы. Таким образом, объект 6 оказывается зажатым пружинами 3 и 4 по значительной площади изнутри и снаружи. При отключении привода пружины 3 и 4 под действием сил упругости возвращаются в исходное положение, освобождая объект 6.
Формула изобретения
Захватное устройство, содержащее полый корпус, установленные внутри корпуса поворотный диск, связанный с приводом, и зажимной элемент в виде пружины кручения, закрепленной одним концо.м на корпусе, а другим - на поворотном диске, отличающееся тем, что, с целью повышения надежности захвата, тонкостенных объектов, устройство снабжено смонтированным в корпусе стержнем и установленной концен- трично основной дополнительной пружиной кручения меньшего диаметра, закрепленной одним концом на стержне, а другим - на диске, при этом основная и дополнительная пружины имеют разнонаправленную навивку витков.
| Зажим | 1982 |
|
SU1073056A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
