САЭ Ot) 4
эо со ел
Изобретение относится к приборостроению, а именно к устройствам для автоматической нагрузки взвешиваемых доз груза.Цель изобретения - расширение рабочего диапазона дозирования.
На чертеже изображен весовой дозатор дискретного действия, продоль- ньш разрез.
Весовой дозатор дискретного действия имеет грузоприемный бункер 1 с весоизмерительными датчиками 2, ленточный транспортерный выгружатель 3, включающий в себя раму 4, уста- новленную на фундаменте 5,приводной барабан 6 с моторным приводом 7, натяжной барабан 8 и лентоподдержива- ющий блок 9, жестко соединенный с грузоприемным бункером 1.
Лентоподдерживающий блок 9 выпо: нен, например, из установленных на отдельной, не связанной с рамой 4 опоре роликов 10, несущих нагруженную дозируемым материалом транспорт- нуга ленту 11. Выходной сигнал, пропорциональный массе поступившего в грузоприемный бункер 1 дозируемого материала, от весоизмерительных дат- чшсов 2, поступает в измерительно- управлягаций блок 12, которьй обеспечивает измерение массы порции и управление питателем (не показан), подающим дозируемым материалом в гру- зоприемный бункер 1.
Весовой дозатор дискретного действия работает следующим образом.
Дозируемый сыпучий материал подается в грузоприемный бункер 1, днищем которого служит транспортерная лента 11, лежащая на роликах 10 лен- топоддерживающего блока 9. Усилие от массы тары и массы дозируемого материала воспринимается весоизмерител ными датчиками 2, выходные сигналы от которых, поступая в измерительно- управляющий блок 12, масштабируются.
суммируются и сравниваются с заданным значением массы порции.
После достижения порций заданного значения массы подача дозируемого материала в грузоприемный бункер прекращается. При наборе порции весоизмерительные датчики 2 деформируются, при этом транспортерная лента 11 также деформируется, однако эта деформация мала и на результатах измерения массы материала практически не сказывается.
После набора заданной порции материала по внешней команде производится включение моторного привода 7, который через приводной барабан 6 осуществляет перемещение транспортерной ленты 11 и выгрузку дозируемого материала из грузоприемного бункера 1. Поскольку приводной 6 и натяжной 8 барабаны, моторный привод 7 и соединяющая их лента 11 укреплены на фундаменте 5 и их масса не входит в тарную массу порционного дозатора, рабочий диапазон измерения весоизмерительных датчиков 2 расширяется.
Формула изобретения
Весовой дозатор дискретного действия, содержащий установленный на весоизмерительных датчиках грузоприемный бункер, ленточный транспортерный разгружатель, включающий в себя раму, приводной и натяжной барабаны, лентоподдерясивающий блок и блок измерения и управления, фундамент, отличающийся тем, что, с целью распшрения рабочего диапазона дозирования, приводной и натяжной барабаны установлены на раме, которая закреплена на-фундаменте, а Лентоподдерживающий роликовый блок прикреплен под разгружающим отверстием грузоприемного бункера к его нижней части.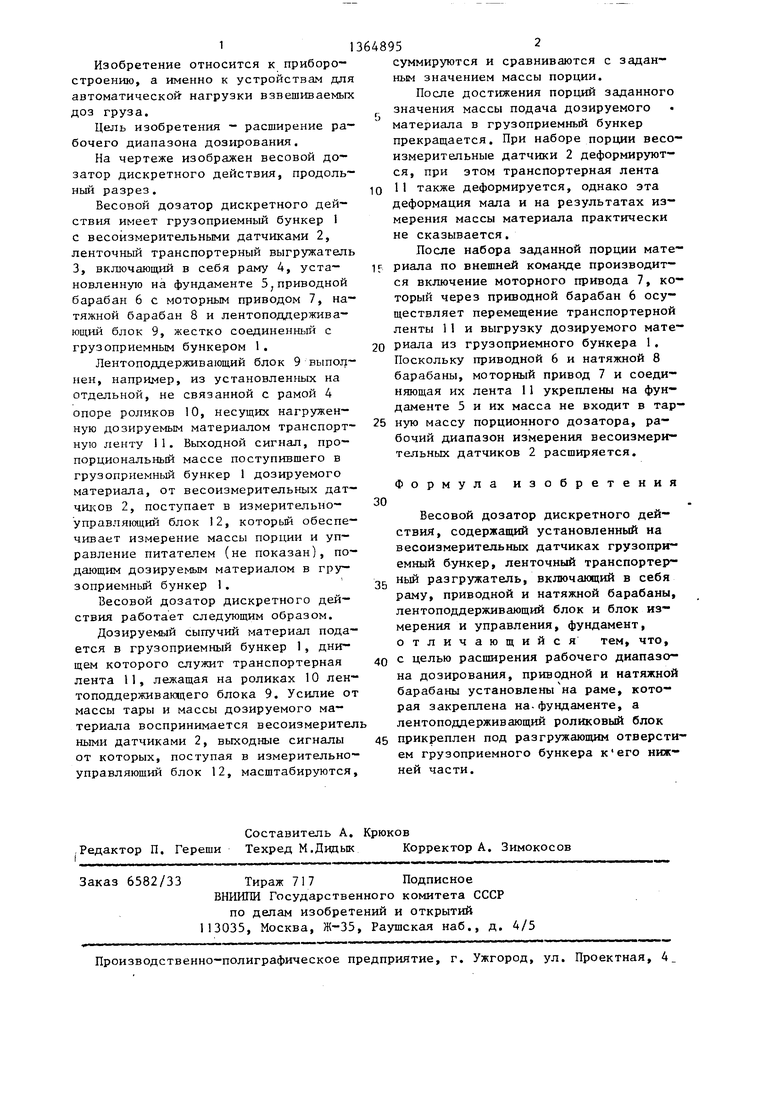
| название | год | авторы | номер документа |
|---|---|---|---|
| ДОЗАТОР | 1990 |
|
RU2027151C1 |
| Весовой порционный дозатор | 1972 |
|
SU437920A1 |
| АВТОМАТИЧЕСКАЯ ПОТОЧНАЯ ЛИНИЯ ДЛЯ ПРИГОТОВЛЕНИЯ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2028979C1 |
| СПОСОБ ВЕСОВОГО ПОРЦИОННОГО ДОЗИРОВАНИЯ | 1989 |
|
RU2027152C1 |
| Дозатор непрерывного действия | 1985 |
|
SU1278598A1 |
| ОБЪЕМНЫЙ ДОЗАТОР ЖИДКОСТИ | 2004 |
|
RU2271520C1 |
| Способ весового дискретного дозирования сыпучих материалов | 1989 |
|
SU1642256A1 |
| Способ комбинированного порционного многокомпонентного дозирования сыпучих,липких и вязких материалов и устройство для его осуществления | 1985 |
|
SU1383104A1 |
| Автоматический весовой дозатор периодического действия | 1975 |
|
SU547643A1 |
| Конвейерные весы | 1983 |
|
SU1137327A1 |
Изобретение относится к устройствам для автоматической нагрузки взвешиваемых доз груза. Цель изобретения - расширение рабочего диапазона дозирования. Усилие от массы тары и массы дозируемого материала воспринимается датчиками 2, выходные сигналы от которых,поступая в измерительно-управляющий блок 12, масштабируются, суммируются и сравниваются с заданным значением массы порции. После набора заданной порции по внешней команде производится включение привода 7, который через барабан 6 перемещает ленту 11 и осуществляет выгрузку дозируемого материала из бункера I. Поскольку барабаны 6 и 8, привод 7 и лента 11 укреплены на фундаменте 5 и их масса не входит в тарную массу порционного дозатора, рабочий диапазон измерения датчиков 2 расширяется. 1 ил. с сл
Составитель А, Крюков
,Редактор П. Гереши Техред М.Дндык
6582/33
Тираж 717Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Корректор А. Зимокосов
| Карнин Е | |||
| Б | |||
| Расчет и конструирование весоизмерительных механизмов | |||
| и детекторов | |||
| М., Машгиз, 1963, с | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Богдан К | |||
| С | |||
| Горбенко В | |||
| Н | |||
| и др | |||
| Весодозирующее оборудование литейных цехов | |||
| М | |||
| Машиностроение, 1972, с | |||
| Способ получения кодеина | 1922 |
|
SU178A1 |
