/fTi.H)
00 О)
ел
о
ел
q}ai.f
Изобретение относится к области автоматики и вычислительной техники и может быть использовано в системах числового программного управления станками и другим оборудованием.
Целью изобретения является расширение функциональных возможностей за счет корректировки неперпендикулярности направляющих станка с ЧПУ и повышение точности.
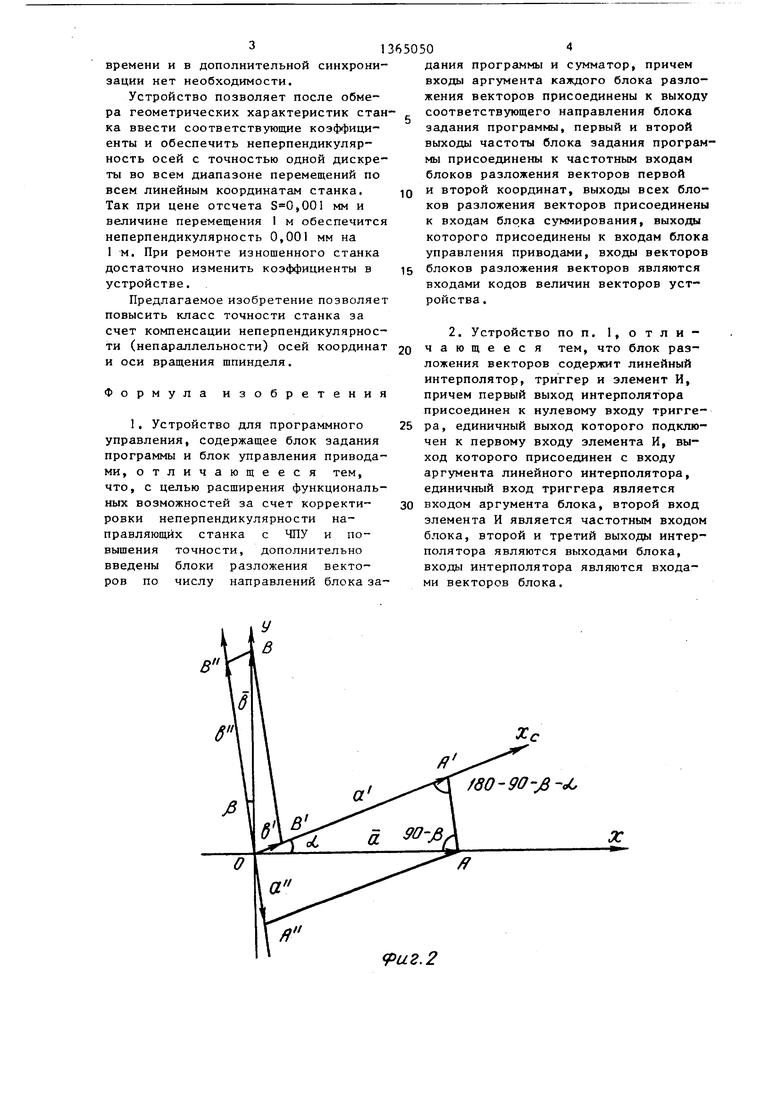
На фиг. 1 приведена структурная схема устройства; на фиг. 2 - векторная диаграмма, поясняющая принцип его работы; на фиг. 3 - линейный интерполятор; на фиг. 4 - блок суммирования .
Устройство (фиг. 1) содержит блок
1задания программы, блоки 2-5 разложения векторов, каждый из которых состоит из линейного интерполятора 6 триггера 7, элемента И8, а также сумматор 9 и блок 10 управления приводами.
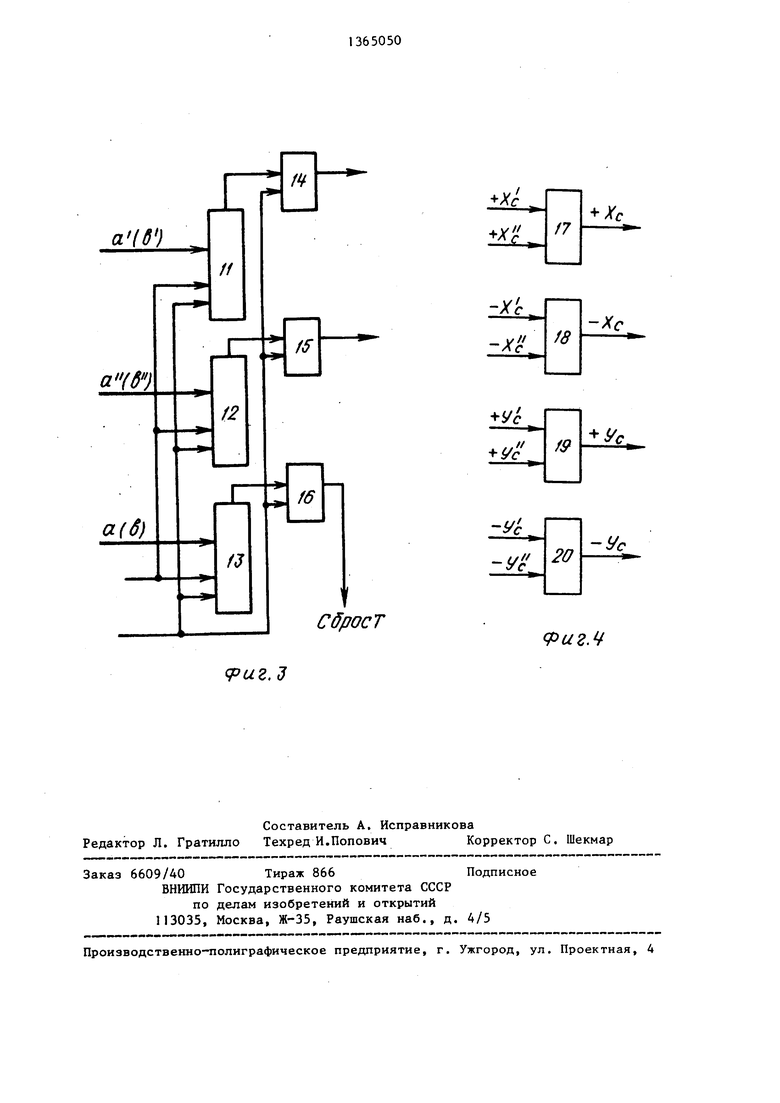
Линейный интерполятор 6 (фиг. 3) содержит накапливающие сумматоры 11- 13, злементы И14-16.
Сумматор 9 содержит элементы ИЛИ 18-20.
Перед началом работы информация распределяется по блокам следующим образом.
Теоретическая ось X рассматривается как результат суммирования некоторых векторов, отложенных на реальных неперпендикулярных осях станка Хс, УС. Так, вектор а, лежащий на оси X, является суммой векторов о и а, лежащих на осях станка Х., УС. Соответственно вектор Ь, лежащий на оси У, является суммой векторов Ь и Ь, лежащих соответственно на осях станка Х., У (фиг. 2). В соответствии с векторной диаграммой на входы линейных интерполяторов блоков
2и 3 разложения векторов подаются коды величин векторов а , Q , 5 , а на входы линейных интерполяторов 6 блоков 4 и 5 разложения векторов по- даются коды величин векторов Ь, Ь , Ъ. После этого блок 1 задания программы начинает отрабатывать программу П(Х, У), составленную в координатах X, У. Каждый импульс с выхода блока 1 направления +Х поступает на вход блока 2 разложения векторов и устанавливает в единицу триггер 7. Единичный потенциал с триггера 7 открывает элемент ИЗ и высокая час5
тота В с выхода элемента И 8 поступает на вход аргумента интерполятора 6. Интерполятор начинает отраба- тывать заданную информацию, причем на выходах координат, в которые занесены величины а и 5, формируют приращения разложения вектора а на оси станка Хц, У , а именно ,
-УС- Так продолжается до тех пор,
пока на выходе координаты, в которую занесена величина а , не появится импульс, который и сбросит в ноль триггер 7. Элемент ИВ закрывается и
f прохождение частоты f р на вход интерполятора 6 прекращается до поступления следующего импульса с выхода направления +Х на единичный вход триггера 7 блока 2. Таким образом,
0 происходит разложение вектора а на векторы 5 и о . Аналогично интерполятор 3 раскладывает вектор (-3) на векторы а и а , но противопог
и а . ложных знаков. Интерполяторы и
делают то же с векторами Ь, Ь , Ь в направлениях ± У. Наличие независимых интерполяторов для каждого направления гарантирует сходимость по нулям программы в осях Х, У 0 при сходимости по нулям программы в осях X, У. В случае трехкоординат- ного интерполятора 1 линейные интерполяторы 6 становятся четырех- координатными, так как каждый век5 тор идеальных осей X, У, Z раскладывается на три сточные оси Х, У, Z,, а количество блоков разложения векторов увеличивается соответственно до шести. Коды величин векторов
0 oi (b ), o(b ), a(b) подаются на входы накапливающих сумматоров 11- 13, которые перед началом работы сбрасываются в ноль сигналом предварительной установки (ПУ).
5 При поступлении ча вход аргумента / импульса частоты if, он стробирует сигналы переполнения сумматоров 11- 13, поступая на вторые входы элементов И14-16, формируя тем самым
0 выходные сигналы интерполятора. По заднему фронту импульса f д коды величин а (Ь ), 01(Ь ), о|(Ь) добавляются в сумматоры 11-13. Таким образом реализуется линейная интерполя5 ция по принципу цифрового дифференциального анализатора. Действительно, если частоты f. и
сдвинуты на 180 метками и
f
(фиг. 1)
, то сигналы с по- никогда не совпадут по
времени и в дополнительной синхронизации нет необходимости.
Устройство позволяет после обмера геометрических характеристик станка ввести соответствующие коэффициенты и обеспечить неперпендикулярность осей с точностью одной дискреты во всем диапазоне перемещений по всем линейным координатам станка. Так при цене отсчета ,001 мм и величине перемещения I м обеспечится неперпендикулярность 0,001 мм на 1 м. При ремонте изношенного станка достаточно изменить коэффициенты в устройстве.
Предлагаемое изобретение позволяет повысить класс точности станка за счет компенсации неперпендикулярности (непараллельности) осей координат и оси вращения шпинделя.
Формула изобретения
1, Устройство для программного управления, содержащее блок задания программы и блок управления приводами, отличающееся тем, что, с целью расширения функциональных возможностей за счет корректировки неперпендикулярности на- правляю цих станка с ЧПУ и повышения точности, дополнительно введены блоки разложения векторов по числу направлений блока за04
Дания программы и сумматор, причем входы аргумента каждого блока разложения векторов присоединены к выходу соответствующего направления блока задания программы, первый и второй выходы частоты блока задания программы присоединены к частотным входам блоков разложения векторов первой и второй координат, выходы всех блоков разложения векторов присоединены к входам блока суммирования, выходы которого присоединены к входам блока управления приводами, входы векторов блоков разложения векторов являются входами кодов величин векторов устройства ,
2. Устройство по п. 1,отли- чающееся тем, что блок разложения векторов содержит линейный интерполятор, триггер и элемент И, причем первый выход интерполятора присоединен к нулевому входу тригге- ра, единичный выход которого подключен к первому входу элемента И, выход которого присоединен с входу аргумента линейного интерполятора, единичный вход триггера является входом аргумента блока, второй вход элемента И является частотным входом блока, второй и третий выходы интерполятора являются выходами блока, входы интерполятора являются входами векторов блока.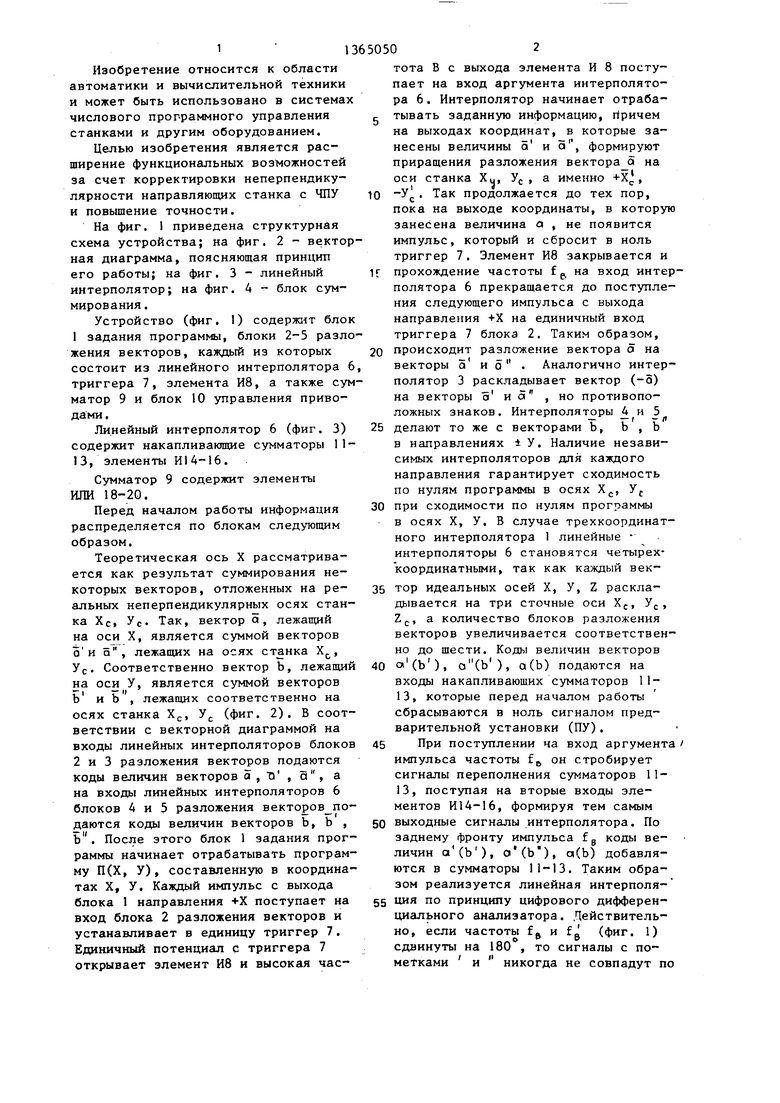
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1986 |
|
SU1406568A1 |
| Устройство для задания программы | 1986 |
|
SU1312529A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Устройство для задания программы | 1986 |
|
SU1363139A1 |
| Устройство для задания программы | 1986 |
|
SU1348773A1 |
| Система для программного управления | 1986 |
|
SU1324011A1 |
| Устройство для задания угла в системах числового программного управления станками | 1987 |
|
SU1495747A1 |
| Устройство для задания программы в полярных координатах | 1986 |
|
SU1396125A1 |
| Программное задающее устройство | 1981 |
|
SU991376A1 |
| Устройство для задания программы обработки в полярных координатах | 1987 |
|
SU1409974A1 |
Изобретение относится к области автоматики и вычислительной техни ки и может быть использовано в системах ЧПУ станками и другим оборудованием. Целью изобретения является расширение функциональных возможностей за счет корректировки неперпендикулярности направляющих станка с ЧПУ и повышение точности. Устройство для программного управления содержит блок I задания программы, блоки 2-5 разложения векторов, каждый из которых состоит из линейного интерполятора 6, триггера 7, элемента И 8, а также сумматор 9 и блок 10 управления приводами. Устройство позволяет после обмера геометрических характеристик станка ввести соответствующие коэффициенты и обеспечить неперпендикулярность осей с точиог стью одной дискреты во всем диапазоне перемещений по всем линейным координатам станка. При ремонте из- ношенного станка достаточно изменить коэффициенты в устройстве. 1 з.п. ф-лы, 4 ил. § (Л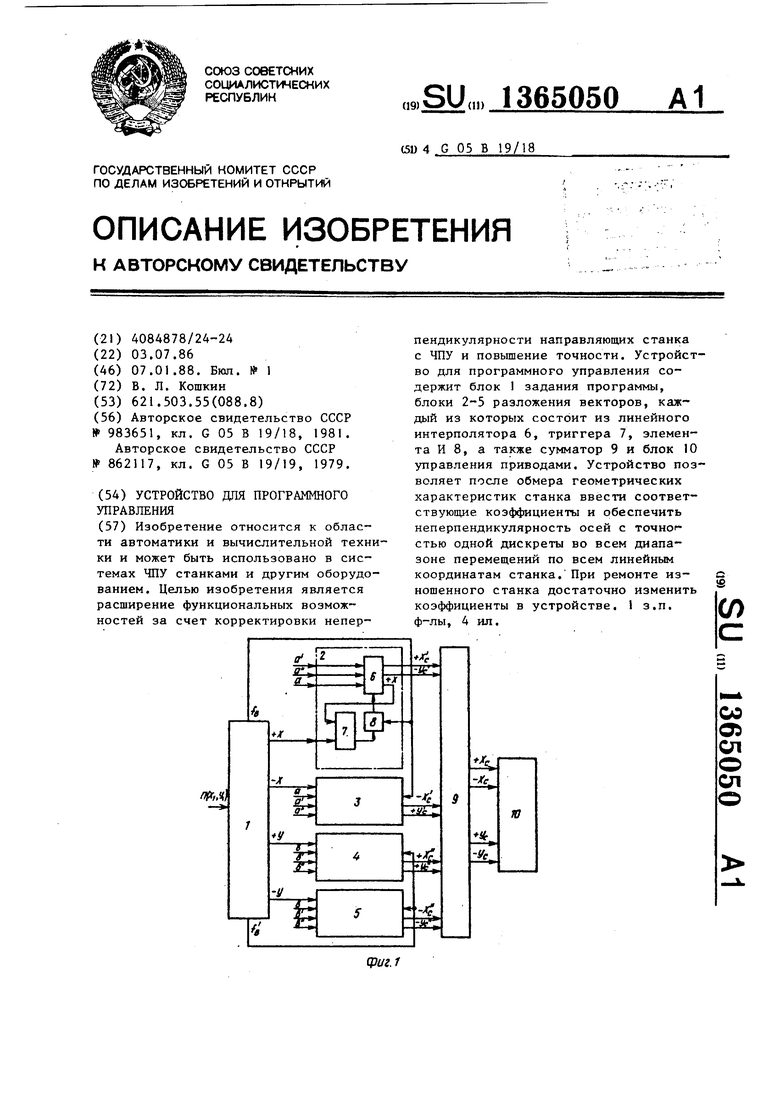
х
fpu2.2
иг. З
/7
Хг
f9
+ УГ.
-у
-у/
20
-Ус
г.У
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для программного управления | 1979 |
|
SU862117A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
