сд
S5
ЭО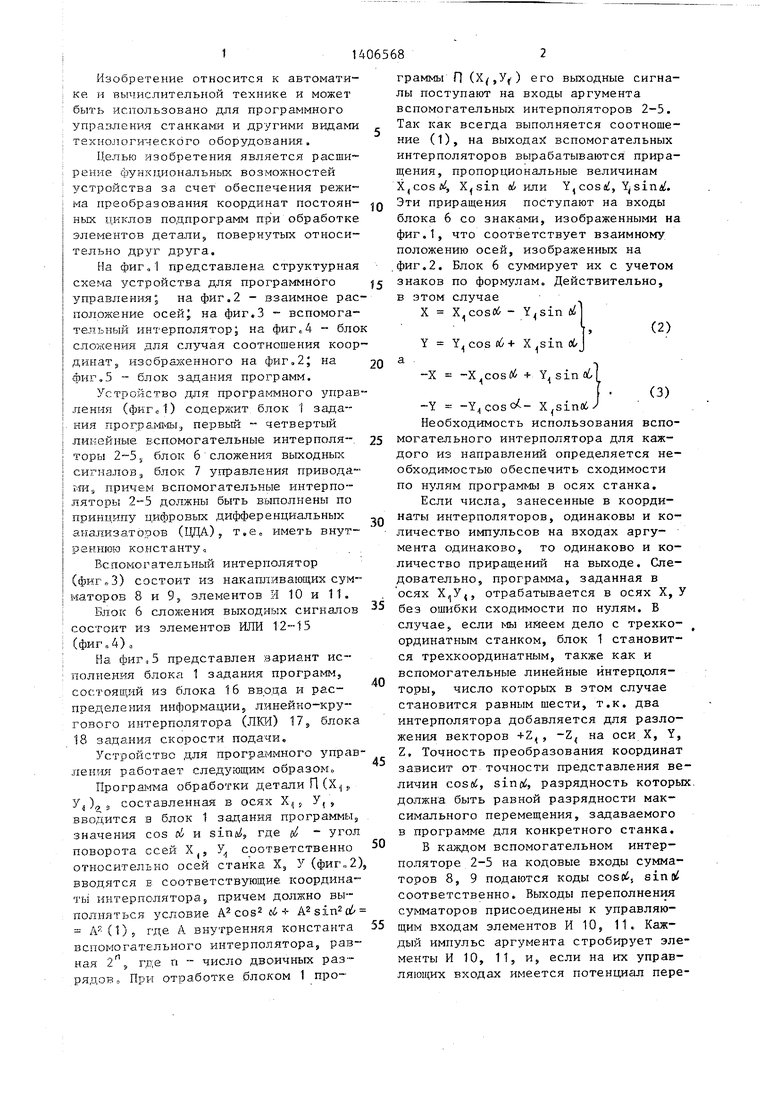
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для задания программы | 1986 |
|
SU1363139A1 |
| Устройство для задания программы | 1986 |
|
SU1348773A1 |
| Система для программного управления | 1986 |
|
SU1324011A1 |
| Устройство для программного управления | 1986 |
|
SU1365050A1 |
| Устройство для задания угла в системах числового программного управления станками | 1987 |
|
SU1495747A1 |
| Устройство для задания программы | 1986 |
|
SU1312529A1 |
| Устройство для задания программы | 1986 |
|
SU1327062A1 |
| Устройство для программного управления | 1986 |
|
SU1317399A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Программное задающее устройство | 1981 |
|
SU991376A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для программного управления станками и другими видами технологического оборудования. Целью изобретения является расширение функциональных возможностей устройства для программного управления. Цель достигается тем, что в известное устройство для программного управления, состоящее из блока 1 задания программы и блока 7 управления приводами, дополнительно введены четьфе вспомогательных линейных интерполятора 2- 5, блок 6 сложения выходных сигналов. Изобретение существенно уменьшает объем управляющих програмь и в ряде случаев позволяет использовать станки более простой конструкции - без поворотного стола. 5 ил. Ф
Фиа./
Изобретение откосится к автоматике, и вычислительной технике и может быть использовано для программного управления станкаки н другими видами технологического оборудования,
Целью изобретения является расши рение функциональных возможностей устройства за счет обеспечения режима преобразования координат постоян- |Q ных циклов подпрограмм пр и обработке элементов детали, повернутых относительно друг друга.
На фиг о 1 представлена структурная схема устройства для программного 15 управления; на фиг.2 - взаимное расположение осей5 на фиг.З - вспомогательный интерполятор; на фиг.4 - блок сложения для случая соотношения коор динаТд изображенного на фиг,2; на 20 фиг.З -- блок за,цания программ.
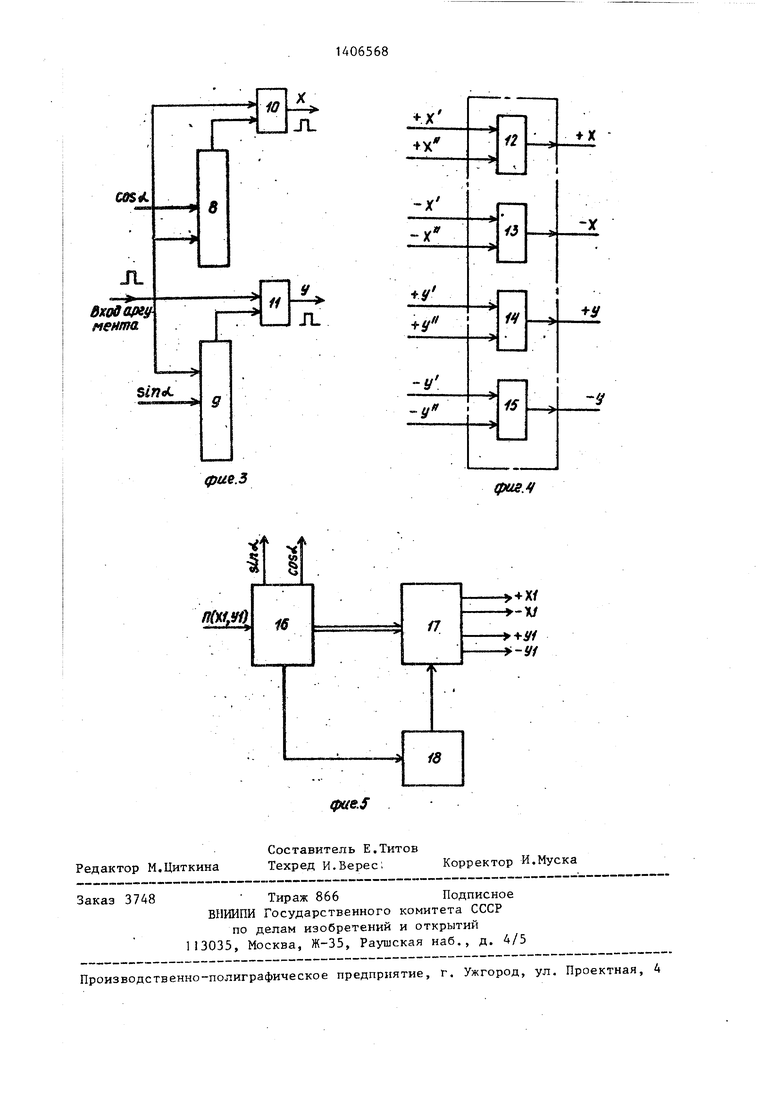
Устройство для nporpatvjMHoro управления (фиго1) содержит блок 1 задания nporpaMivbij первый - четвертый линейные вспомогательные интерполя-. 25 торы 2-5 S блок 6 сложения выходньк сигналов 3 блок 7 управления привода- ш-, причем вспомогательные интерполяторы 2-5 должны быть выполнены по принципу цифровых дифференциальных , анализаторов (ЦДА), т.е, иметь раннюю константу.
Вспомогательный интерполятор (фиг«3) состоит из накапливающих сум- маторов 8 и 9, злементов И 10 и 11, Блок 6 сложения выходных сигналов состоит из элементов ИЛИ 12-15 ()а
На представлен вариант ис- полнения блока 1 задания программ, состоящий из блока 16 ввода и распределения информации, линейно-кругового интерполятора (ЛКИ) l блока 18 задания скорости подачи.
Устройство для программного управ- леншг работает следующим образом.
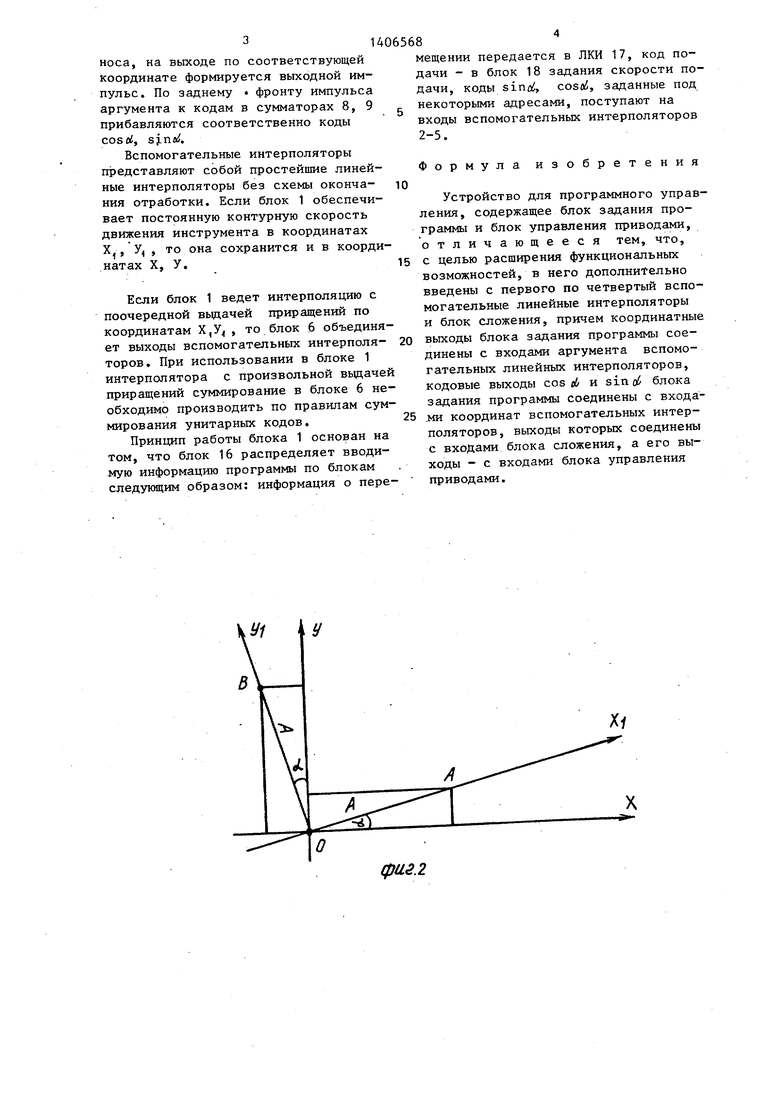
Программна обработки детали П(Х,|„ У ) S составленная в осях Х,,, У,, вводится в блок 1 задания программы значения cos и и sin&J, где с угол поворота ссей Х, У соответственно относительно осей станка Х, З (фиг„2)5 вводятся в соответствующие координаты интерполятора, причем должно выполняться условие А cos2 «Я- A. АЧ1);, где А внутренняя константа 55 вспомогательного интерполятора, равная где п - число двоичных разрядов. При отработке блоком 1 про35
40
45
50
Q
5 0
5
5
5
0
5
0
граммы П (Х,У|) его выходные сигналы поступают на входы аргумента вспомогательных интерполяторов 2-5, Так как всегда выполняется соотношение (1), на выхода вспомогательных интерполяторов вырабатываются приращения, пропорциональные величинам X cosft, fti или , Y sinsI, Эти приращения поступают на входы блока 6 со знаками, изображенными на фиг,1, что соответствует взаимному положению осей, изображенных на .фиг,2, Блок 6 суммирует их с учетом знаков по формулам. Действительно, в этом случае
X Х созоб -
Y Y, cos«i+ X.sinod 1 1 J
аТ
Х -X cosOi + Y sino6f
I (3)
-Y X sinai
Необходимость использования вспомогательного интерполятора для каждого из направлений определяется необходимостью обеспечить сходимости по нулям программы в осях станка.
Если числа, занесенные в координаты интерполяторов, одинаковы и количество импульсов на входах аргумента одинаково, то одинаково и количество приращений на выходе. Следовательно, программа, заданная в осях , отрабатывается в осях X, У без ошибки сходимости по нулям, В случае, если мы ийеем дело с трехко- ординатным станком, блок 1 становится трехкоординатным, также как и вспомогательные линейные интердоля- торы, число которых Б этом случае становится равным шести, т,к, два интерполятора добавляется для разложения векторов +Z,, -Zj на оси X, Y, Z, Точность преобразования координат зависит от точности представления величин cosoi, , разрядность которых. должна быть равной разрядности максимального перемещения, задаваемого в прог1)амме для конкретного станка.
В каждом вспомогательном интерполяторе 2-5 на кодовые входы сумматоров 8, 9 подаются коды cost, sinoi соответственно. Выходы переполнения сумматоров присоединены к управляющим входам элементов И 10, 11. Каждый импульс аргумента стробирз ет элементы И 10, 11, и, если на их управляющих входах имеется потенциал переноса, на выходе по соответствующей координате формируется выходной импульс. По заднему фронту импульса аргумента к кодам в сумматорах 8, 9 прибавляются соответственно коды cos Hi, sj.nft.
Вспомогательные интерполяторы представляют собой простейшие линейные интерполяторы без схемы окончания отработки. Если блок 1 обеспечивает постоянную контурную скорость движения инструмента в координатах Х, У, , то она сохранится и в коорди- натах X, У.
Если блок 1 ведет интерполяцию с поочередной вьщачей приращений по координатам Х,У , то блок 6 объединямещении передается в ЛКИ 17, код подачи - в блок 18 задания скорости по дачи, коды sinai, cosftJ, заданные под некоторыми адресами, поступают на входы вспомогательных интерполяторов 2-5.
Формула изобретения
Устройство для программного управ ления, содержащее блок задания программы и блок управления приводами, отличающееся тем, что, 15 с целью расщирения функциональных возможностей, в него дополнительно введены с первого по четвертый вспомогательные линейные интерполяторы и блок сложения, причем координатные
10
ет выходы вспомогательных интерполя- 20 выходы блока задания программы соеторов. При использовании в блоке 1 интерполятора с произвольной выдачей приращений суммирование в блоке 6 необходимо производить по правилам суммирования унитарных кодов.
Принцип работы блока 1 основан на том, что блок 16 распределяет вводимую информацию программы по блокам следукнцим образом: информация о перемещении передается в ЛКИ 17, код подачи - в блок 18 задания скорости подачи, коды sinai, cosftJ, заданные под некоторыми адресами, поступают на входы вспомогательных интерполяторов 2-5.
Формула изобретения
Устройство для программного управления, содержащее блок задания программы и блок управления приводами, отличающееся тем, что, с целью расщирения функциональных возможностей, в него дополнительно введены с первого по четвертый вспомогательные линейные интерполяторы и блок сложения, причем координатные
динены с входами аргумента вспомогательных линейных интерполяторов, кодовые выходы cos ot и sinoi блока задания программы соединены с входа- ,ми координат вспомогательных интерполяторов, выходы которых соединены с входами блока сложения, а его выходы - с входами блока управления приводами.
Ху
.2
X
JL
ces
в
1i
У
Л.
Ыпл
9
фие.З
(pus.v
| Головенков С.Н., Сироткин С.В | |||
| Основы автоматики и автоматического регулирования станков с программным управлением | |||
| М.: Машиностроение, 1980, с | |||
| Экономайзер | 0 |
|
SU94A1 |
| ВПТБ | 0 |
|
SU408276A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
