(21)4093302/25-27
(22)21.07.86
(46) 15.01.88. Бюп. № 2 475) А.А. Мудренко и В.П. Горблюк
(53)621.979:62-229.61(088.8)
(56)Авторское свидетельство СССР № 1279722, кл. В 21 D 43/00,
В 30 В 15/30, 30.09„85.
(54)УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК В РАБОЧЕЙ ЗОНЕ ПРЕССА
(57)Изобретение относится к области обработки металлов давлением и может быть использовано для перемещения заготовок в рабочей зоне пресса. Целью изобретения является расширение технологических возможностей путем перемещения различных заготовок.
Заготовки перемещаются захватными органами, которые закреплены на раме с возможностью перемещения в направлении, перпендикулярном оси перемещения заготовок Захватные органы приводятся в движение от силового цилиндра через клиновой механизм. Рама консольно закреплена на штанге, установленной в обойме с возможностью перемещения от другого силового цилиндра в горизонтальном направлении. Обойма смонтирована с возможностью перемещения в вертикаль ном направлении от третьего силово- to цилиндра. Подвижность и возможность регулировки штанг позволяет перемещать заготовки различных размеров. 2 з.Пс ф-лы, 5 ил.
i
СЛ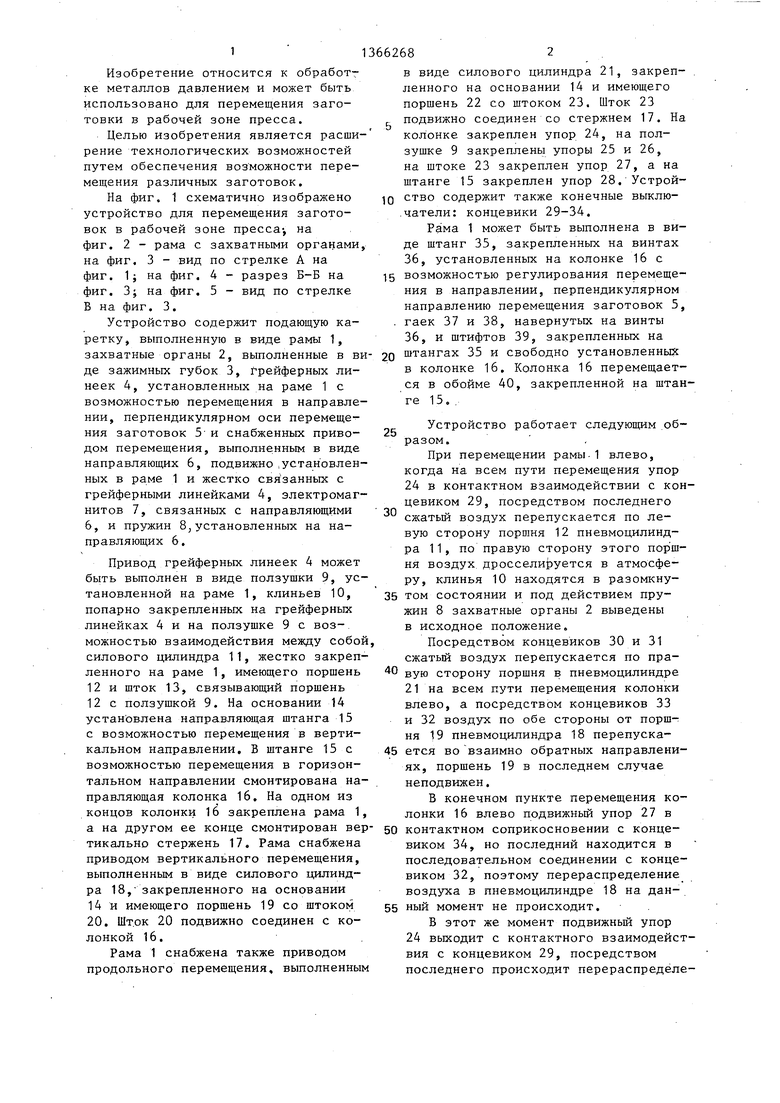

| название | год | авторы | номер документа |
|---|---|---|---|
| Грейферное подающее устройство к штампу | 1983 |
|
SU1159698A1 |
| Устройство для перемещения заготовок между рабочими позициями многопозиционного пресса | 1987 |
|
SU1438894A1 |
| Автоматизированный комплекс для горячей штамповки | 1988 |
|
SU1750839A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Грейферная подача | 1989 |
|
SU1662728A1 |
| Устройство для отделения листовой заготовки от стопы и подачи ее в рабочую зону пресса | 1982 |
|
SU1058686A1 |
| Устройство для подачи заготовок в рабочую зону пресса | 1981 |
|
SU967626A1 |
| Устройство для обработки штучных заготовок | 1988 |
|
SU1538964A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Грейферная подача к штамповочному прессу | 1980 |
|
SU980915A1 |

puei
Изобретение относится к обработке металлов давлением и может быть использовано для перемещения заготовки в рабочей зоне пресса.
Целью изобретения является расширение технологических возможностей путем обеспечения возможности перемещения различных заготовок.
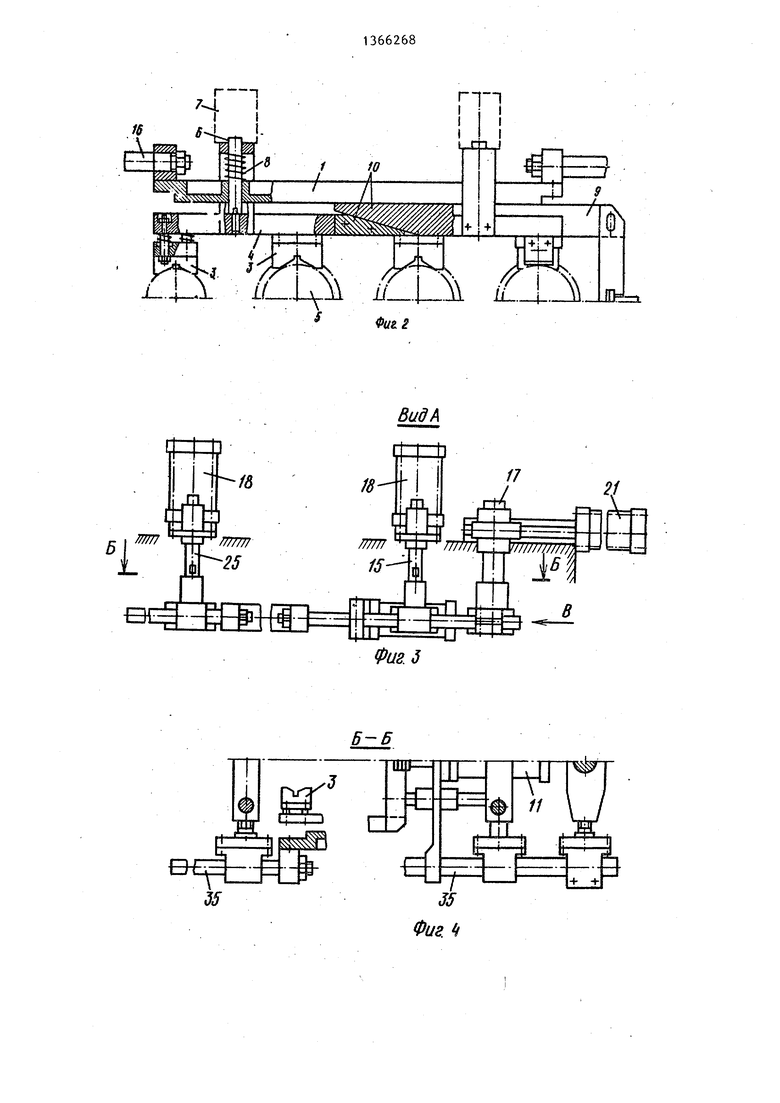
На фиг. 1 схематично изображено устройство для перемещения заготовок в рабочей зоне пресса-, на фиг. 2 - рама с захватными органами, на фиг. 3 - вид по стрелке А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - вид по стрелке Б на фиг. 3.
Устройство содержит подающую каретку, выполненную в виде рамы 1, захватные органы 2, выполненные в ви де зажимных губок 3, Грейферных линеек 4, установленных на раме 1 с возможностью перемещения в направлении, перпендикулярном оси перемещения заготовок 5 и снабженных приводом перемещения, выполненным в виде направляющих 6, подвижно .установленных в раме 1 и жестко свя занных с грейферными линейками 4, электромагнитов 7, связанных с направляющими 6, и пружин 8,установленных на направляющих 6.
Привод грейферных линеек 4 может быть выполнен в виде ползушки 9, установленной на раме 1, клиньев 10, попарно закрепленных на грейферных линейках 4 и на ползушке 9 с возможностью взаимодействия между собой силового цилиндра 11, жестко закрепленного на раме 1, имеющего поршень 12 и шток 13, связывающий порщень 12 с ползушкой 9. На основании 14 установлена направляющая штанга 15 с возможностью перемещения в вертикальном направлении, Б штанге 15 с возможностью перемещения в горизонтальном направлении смонтирована направляющая колонка 16. На одном из концов колонки 16 закреплена рама 1 а на другом ее конце смонтирован вер тикально стержень 17. Рама снабжена приводом вертикального перемещения, выполненным в виде силового цилиндра 18, закрепленного на основании 14 и имеющего поршень 19 со штоком 20. Шт.ок 20 подвижно соединен с колонкой 16.
Рама 1 снабжена также приводом продольного перемещения, выполненным
3662682
в виде силового цилиндра 21, закрепленного на основании 14 и имеющего поршень 22 со штоком 23. Шток 23 подвижно соединен со стержнем 17. На колонке закреплен упор 24, на ползушке 9 закреплены упоры 25 и 26, на штоке 23 закреплен упор 27, а на штанге 15 закреплен упор 28. Устрой1Q ство содержит также конечные выклю- .чатели: концевики 29-34.
Рама 1 может быть выполнена в виде штанг 35, закрепленных на винтах 36, установленных на колонке 16 с
15 возможностью регулирования перемещения в направлении, перпендикулярном направлению перемещения заготовок 5, . гаек 37 и 38, навернутых на винты 36, и штифтов 39, закрепленных на - 20 штангах 35 и свободно установленных в колонке 16. Колонка 16 перемещается в обойме 40, закрепленной на штанге 15. .
25
Устройство работает следующим об30
разом.
При перемещении рамы-1 влево, когда на всем пути перемещения упор 24 в контактном взаимодействии с кон цевиком 29, посредством последнего сжатый воздух перепускается по левую сторону порошя 12 пневмоцилинд- ра 11, по правую сторону этого пор ш- ня воздух, дросселируется в атмосферу, клинья 10 находятся в разомкну35 том состоянии и под действием пружин 8 захватные органы 2 выведены в исходное положение.
Посредством концевиков 30 и 31 сжатьй воздух перепускается по пра вую сторону поршня в пневмоцилиндре 21 на всем пути перемещения колонки влево, а посредством концевиков 33 и 32 воздух по обе стороны от порш-: ня 19 пневмоцилиндра 18 перепуска45 ется во взаимно обратных направлениях, поршень 19 в последнем случае неподвижен.
Б конечном пункте перемещения колонки 16 влево подвижньй упор 27 в
50 контактном соприкосновении с конце- виком 34, но последний находится в последовательном соединении с конце- виком 32, поэтому перераспределение воздуха в пневмоцилиндре 18 на дан55 ный момент не происходит.
Б этот же момент подвижньй упор 24 выходит с контактного взаимодействия с концевиком 29, посредством последнего происходит перераспределе3 , ние воздуха в пневмоцилиндре 11 по правую сторону поршня 12 сжатый воздух перепускается, по левую сторону дросселируется в атмосферу (поршень 12 перемещается влево), срабатывают клинья 10 и захватные органы 2 вводятся в рабочую зону пресса (не показан) .
С выходом захватных органов 2 в рабочую зону пресса подвижный упор 25 выходит с контактного взаимодействия с концевиком 31, по левую сто ,рону от поршня в пневмоцилиндре 21 происходит перераспределение воздух а так как по обе стороны его теперь создаются одинаковые условия (давления) , то поршень остается в неподвином положении.
Одновременно подвижный упор 26 взаимодействует с концевиком 32, перераспределяя тем самым воздух по нижнюю сторону поршня 19 пневмоци- линдра 18.
Поршень 19, а, следовательно, захватные органы 11 с заготовками пермещаются в верхнее положение до соприкосновения упора с концевиком 30 после Чего происходит перераспределение воздуха Б пневмоцилиндре 21 уже по правую сторону от поршня 22 и захватные органы 2 транспортируют заготовки в крайнее правое положени
При этом в момент выхода упора 27 с контактного взаимодействия с концевиком 34, последний перераспределяет воздух в пневмоцилиндре 18 и на всем пути перемещения упора 27 к концевику 33 поршень 19 находится в неподвижном крайнем верхнем положении доконтактного взаимодействия последних. После чего вновь происходит перераспределение воздуха по верхнюю сторону поршня 19 пневмоци- линдра 18 (подается сжатый воздух), поршень 19 перемещается в нижнее положение и захватные органы 2 устанавливают заготовки на рабочий стол пресса (не показан).
В крайнем положении перемещения упор 24 взаимодействует с концевико 29, происходит перераспределение воздуха в пневмоцилиндре 11 (по левую сторону от поршня 12 сжатый воздух подается, по правую - дросселируется в атмосферу), захватные органы 12 выводятся в исходное (открытое) положение, после взаимодействи
8
упора 25 с концевкком 31. поршень 22 посредством стержня 17 перемещг ат колонну 16 влево.
Формула и 3 о б р е
е в и я
и связанный с обоймой; штангу„ расположенную в обойме с возможностью перемещения в горизонтальном направлении, дополнительный силовой ци-- линдр, смонтированный на основании и
связанный со штангой,, закрепленную на штанге и несущую захватные органы, снабженные приводом, и систе--- му управления, о т л и ч а ю щ е е с я тем, что, с целью расширения
технологических возможностей путем обеспечения возможности перемещения различных заготовок, захватные органы выполнены в виде ползушек смонтированных симметрично относительно
оси г еремещения с возможностью пере-- мещения в направлении, перпендикулярном оси перемещения и подпр жиненнцп - в этом направлении, привод выполнен в виде клиновых опор, закрепленных на
захватных органах, клиньев, установленных на раме с возможностью взаимодействия с клиновыми опорами, и индивидуального силового цилиндра, смонтированного на раме и связанного
с клиньями.
регулировочного перемещения в направлении, перпендикулярном к оси перемещения и снабженньк механизмом регулировочного перемещения, а захватные органы смонтированы на дополнительных штангах.
ленных в штанге и расположенных между винтами.
СТ , Х.1Л
п I I
Sif&A
/.-HI
/7
te J
ТПШ
D
JJlU
11
I I
t
J 4
777777
35 J7
Вид В
0t/8.ff
