(Л
СО QD iOO Ю
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЛОКИРОВКОЙ ДИФФЕРЕНЦИАЛА ВЕДУЩЕГО МОСТА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2246060C2 |
| Устройство для повышения проходимости транспортного средства | 1986 |
|
SU1335489A1 |
| ГРУЗОВОЙ АВТОМОБИЛЬ СО ВСЕМИ ВЕДУЩИМИ КОЛЕСАМИ | 2011 |
|
RU2483945C1 |
| ТРАНСМИССИЯ С ГИДРАВЛИЧЕСКИМИ МЕЖОСЕВОЙ И МЕЖКОЛЕСНЫМИ ДИФФЕРЕНЦИАЛЬНЫМИ СВЯЗЯМИ С АВТОМАТИЧЕСКИ УПРАВЛЯЕМЫМИ РЕЖИМАМИ БЛОКИРОВКИ ДЛЯ АВТОТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2551052C2 |
| Система управления блокировкой дифференциала ведущего моста колесного транспортного средства | 1990 |
|
SU1763256A1 |
| Шестиколесное тяговое средство | 1989 |
|
SU1643206A1 |
| Механизм для перераспределения нагрузки между ведущими мостами транспортного средства | 1980 |
|
SU944955A1 |
| Колесное транспортное средство | 1987 |
|
SU1418089A1 |
| Двухзвенное транспортное средство | 1981 |
|
SU1011398A1 |
Изобретер ие относится к сельскохозяйственному машиностроению. Цель изобретения - повышение эффективности путем автоматизации процесса регулирования перераспределения тяговых нагрузок по ведущим мостам. Гидромеханическая система управления положением грунтозацепов содержит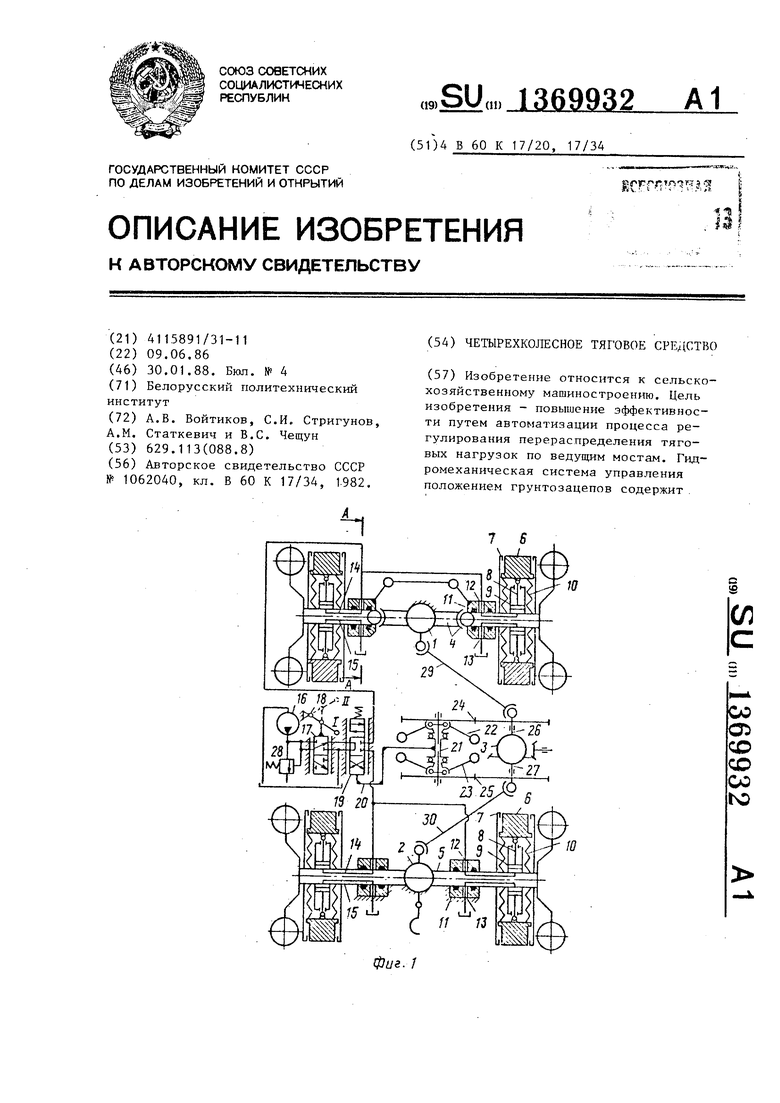
Фиг,1
трехпозиционньш распределитель 19, центробежные датчики 22 и 23 оборотов выходных валов 26 и 27 межосевого дифференциала 3, имеющ:иё общий чувствительный элемент. Перераспределение
1
Изобретение относится к сельскохозяйственному машиностроению и предназначено для использования в тяговы машинах с колесной формулой 4x4.
Цель изобретения - повьш1ение эффективности путем автоматизации процесса регулирования перераспределения тяговых нагрузок по ведущим мостам.
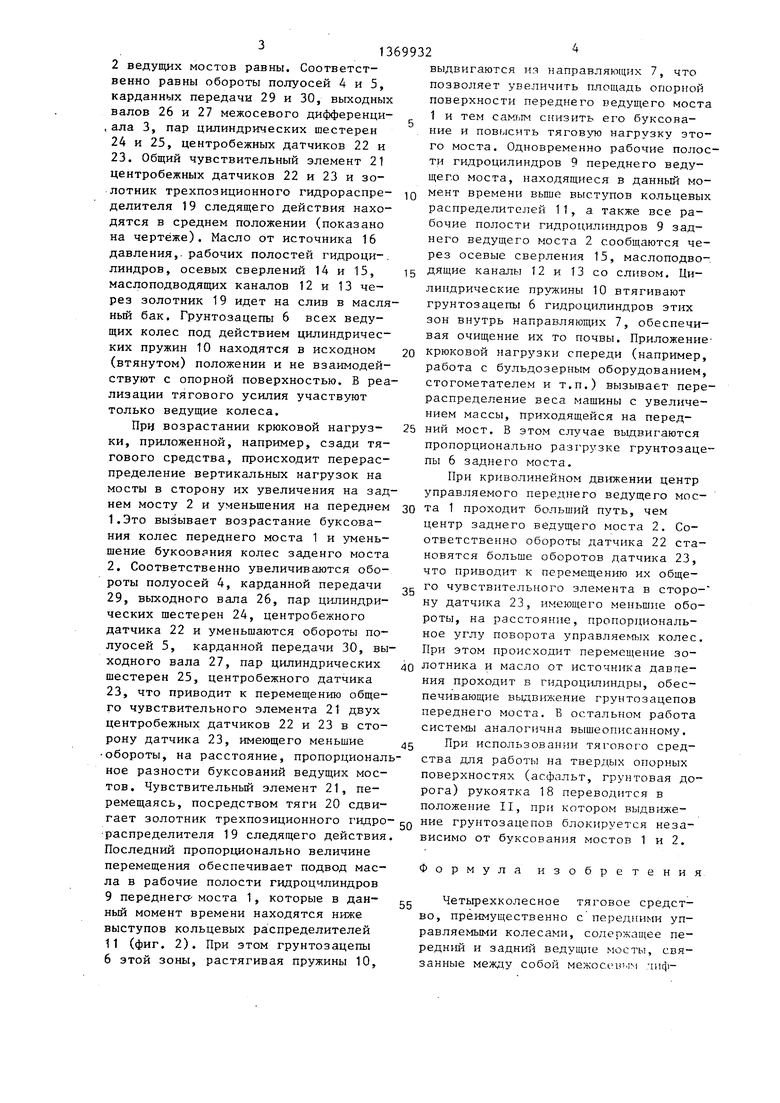
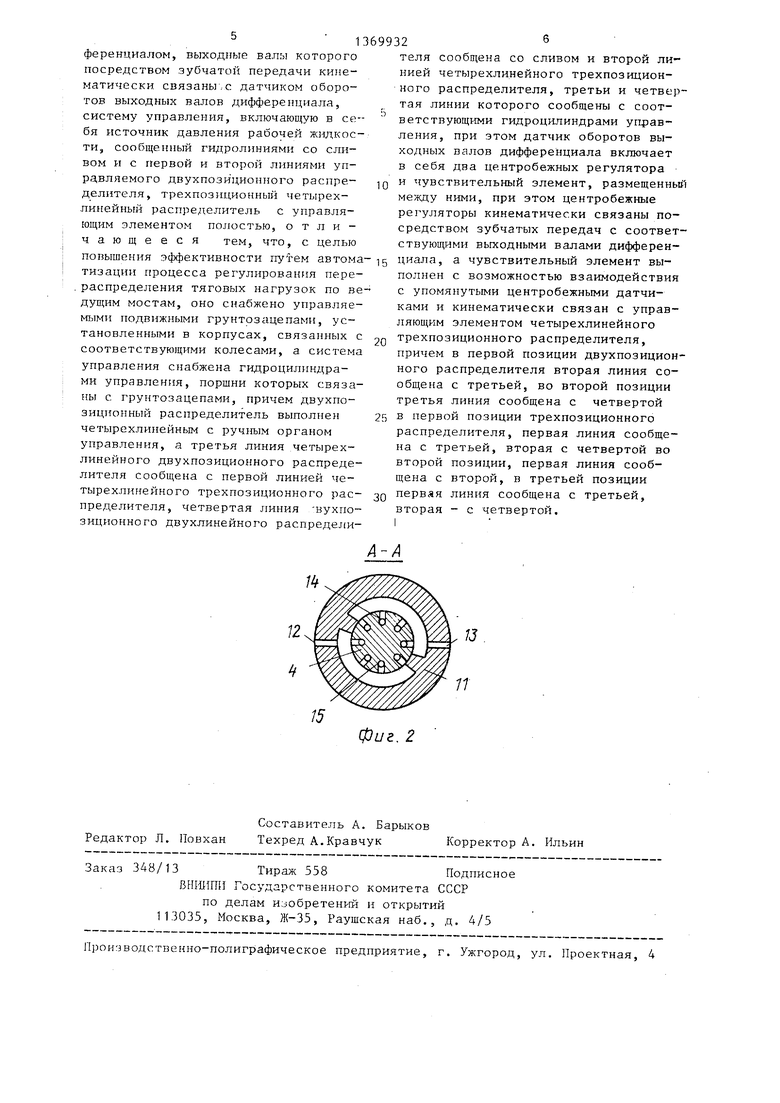
На фиг. 1 приведена принципиальная кинематическая схема тягового средства; на фиг. 2 - разрез А-А на фиг, 1.
Четырехколесное тяговое средство содержит управляемый передний 1 и задний 2 ведущие мосты, связанные между собой межосевым дифференциалом 3. На полуосях 4 и 5 переднего 1 и заднего 2 ведущих мостов установ- лены почвозацепы-уширители, содержа- : щие грунтозацепы 6, перемещающиеся ;в направляющих 7, жестко связанных с полуосями 4 и 5, гидроцилиндры, штоки 8 которых связаны с грунто- зацепами, а корпуса гидроцилиндров 9 жестко закреплены на полуосях 4 и 5, и цилиндрические пружины 10, втягивающие грунтозацепы 6 внутрь направляю .щих 7. Число почвозацепов-уширителей равно числу ведущих колес тягового средства. Неподвижно, относительно полуосей 4 и 5 установлены кольцевые распределители 11, имеющие каждый по два маслоподводящих канала 12 и 13, связанных соответственно с нагнетательной и,сливной магистралями гидромеханической системы управления положением грунтозацепов 6. В полуосях 4 и 5 выполнены сэсевые сверления 14 и 15, связывающие рабочие полости подвода масла корпусов гидроцилиндров 9 с маслоподводящими каналами 12 и 13 кольцевых распределителей 11. Число осевых сверлений
нагрузок компенсируется выдвижением грунтозацепов 6 соответствующего моста и увязывается с соотношением буксования колес обоих мостов тягового средства. 2 ил.
0
Г
0
5
0
5
0
5
в полуосях 4 и 5 равно числу гидроцилиндров 9.
Подвод масла в рабочие полости гидроцилиндра, осевые сверления 14, маслоподводящие каналы 12 от источника 16 давления или слив масла из рабочих полостей гидроцилиндров, осевых сверлений 15, маслоподводящих каналов 13 в бак осуществляется через двухпозиционный распределитель 17, управляемьш рукояткой 18, и трехпозиционньш гидрораспределитель 19 следящего действия, золотник которого кинематически посредством тяги 20 связан с общим чувствительным элементом 21 двух центробежных датчиков 22 и 23, кинематически посредством, пар цилиндрических шестерен 24 и 25 связанных с выходными валами 26 и 27 межосевого дифференциала 3. В гидролинии между источником 16 давления и двухпозиционным распределителем 17 установлен редукционный клапан 28. Подвод мощности к ведущим колесам осуществляется от межосевого дифференциала 3 через карданные передачи 29 и 30, симметричные межколесные дифференциалы, полуоси 4 и 5 переднего 1 и заднего 2 ведущих мостов.
Четырехколесное тяговое средство работает следующим образом.
В рабочем режиме движения (при работе в поле с навесными или прицепными машинами и орудиями) рукоятка 18 двухпозиционного распределителя 17 находится в положении I, при котором масло от источника 16 давления подается к трехпозиционному гидрораспределителю 19 следящего действия. При прямолинейном движении по горизонтальной опорной поверхности с крюковыми нагрузками, не вызывающ тми перераспределение веса машины, буксования колес переднего 1 и заднего
10
15
2 ведущих мостов равны. Соответстенно равны обороты полуосей 4 и 5, карданных передачи 29 и 30, выходных валов 26 и 27 межосевого дифференци- ала 3, пар цилиндрических шестерен 24 и 25, центробежных датчиков 22 и 23. Общий чувствительный элемент 21 центробежных датчиков 22 и 23 и зоотник трехпоэиционного гидрораспреелителя 19 следящего действия нахоятся в среднем положении (показано на чертеже). Масло от источника 16 давления,, рабочих полостей гидроци-. линдров, осевых сверлений 14 и 15, маслоподводящих каналов 12 и 13 через золотник 19 идет на слив в масляный бак. Грунтозацепы 6 всех ведущих колес под действием цилиндрических пружин 10 находятся в исходном 20 (втянутом) положении и не взаимодействуют с опорной поверхностью. В реализации тягового усилия участвуют только ведущие колеса.
Прч возрастании крюковой нагрузки, приложенной, например, сзади тягового средства, происходит перераспределение вертикальных нагрузок на мосты в сторону их увеличения на зад25
нем мосту 2 и уменьшения на переднем зо та 1 проходит больший путь, чем
ла в рабочие полости гидроцчлиндров 9 переднего- моста 1, которые в данный момент времени находятся ниже выступов кольцевых распределителей 11 (фиг. 2). При этом Грунтозацепы 6 этой зоны, растягивая пружины 10,
5
0
выдвигаются из направляющих 7, что позволяет увеличить площадь опорной поверхности переднего ведущего моста 1 и тем самым снизить его буксование и поврлсить тяговую нагрузку этого моста. Одновременно рабочие полости гидроцилиндров 9 переднего ведущего моста, находящиеся в данный момент времени вьше выступов кольцевых распределителей 11, а также все рабочие полости гидроцилиндров 9 заднего ведущего моста 2 сообщаются через осевые сверления 15, маслоподво- дящие каналы 12 и 13 со сливом. Цилиндрические пружины 10 втягивают Грунтозацепы 6 гидроцилиндров этих зон внутрь направляющих 7, обеспечивая очищение их то почвы. Приложение- крюковой нагрз зки спереди (например, работа с бульдозерным оборудованием, стогометателем и т.п.) вызывает перераспределение веса машины с увеличением массы, приходящейся на перед- 5 НИИ мост. В этом случае выдвигаются пропорционально разгрузке грунтозаце- пы 6 заднего моста.
При криволинейном движении центр управляемого переднего ведущего мос35
центр заднего ведущего моста 2. Соответственно обороты датчика 22 становятся больше оборотов датчика 23, что Приводит к перемещению их общего чувствительного элемента в сторону датчика 23, имеющего меньшие обороты, на расстояние, пропорциональное углу поворота управляемых колес При этом происходит перемещение зо- 40 лотника и масло от источника давления проходит в гидроцилиндры, обеспечивающие выдвижение грунтозацепов переднего моста. В остальном работа системы аналогична вышеописанному.
При использовании тягового средства для работы на твердых опорных поверхностях (асфальт, грунтовая дорога) рукоятка 18 переводится в положение II, при котором выдвиже45
gg ние грунтозацепов блокируется неза-
gg ние грунтозацепов блокируется неза-
55
висимо от буксования мостов 1 и 2. Формула изобретения
Четырехколесное тяговое средство, преимущественно с передними управляемыми колесами, содержащее передний и задний ведущие мосты, связанные между собой межосеным лифференциалом, выходные валы которого посредством зубчатой передачи кинематически связаны,с датчиком оборотов выходных валов дифференциала, систему управления, включаюв ую в себя источник давления рабочей жидкости, сообщенный гидролиниями со сливом и с ггервой и второй линиями управляемого двухпозидионного распределителя, трехпозиционный четырехлинейный распределитель с управляющим элементом полостью, отличающееся тем, что, с целью
повышения эффективности путем автома- циала, а чувствительный элемент вытизации процесса регулирования перераспределения тяговых нагрузок по ведущим мостам, оно снабжено управляемыми подвижными грунтрзгщепами, установленными в корпусах, связанных с соответствующими колесами, а система управления снабжена гидроцшпшдра- ми управления, поршни которых связаны с грунтозацепами, причем двухпо- зиционный распределитель выполнен четырехлинейным с ручным органом управления, а третья линия четырехлинейного двухпозиционного распределителя сообщена с первой линией че- тырехлир1ейного трехпозиционного распределителя, четвертая линия -вухпо- зиционного двухлинейного распреде:п-1
теля сообп1ена со сливом и второй линией четырехлинейного трехпозицион- ного распределителя, третьи и четвертая линии которого сообщены с соответствующими гидроцилиндрами управления, при этом датчик оборотов выходных валов дифференциала включает в себя два центробежных регулятора и чувствительный элемент, размещенный между ними, при этом центробежные регуляторы кинематически связаны посредством зубчатых передач с соответствующими выходными валами дифферен
полнен с возможностью взаимодействия с упомянутыми центробежными датчиками и кинематически связан с управляющим элементом четырехлинейного трехпозиционного распределителя, причем в первой позиции двухпозиционного распределителя вторая линия сообщена с третьей, во второй позиции третья линия сообщена с четвертой в первой позиции трехпозиционного распределителя, первая линия сообщена с третьей, вторая с четвертой во второй позиции, первая линия сообщена с второй, в третьей позиции первая линия сообщена с третьей, вторая - с четвертой.
11
фиг. 2
| Четырехколесное транспортное средство | 1982 |
|
SU1062040A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
