1
Изобретение относится к подъемно транспортному оборудованию, а именно к телескопическим захватам грузоподъ емных машин, преимущественно стеллажных кранов-тптабелеров.
Цель изобретения - повышение точ ности позиционирования.
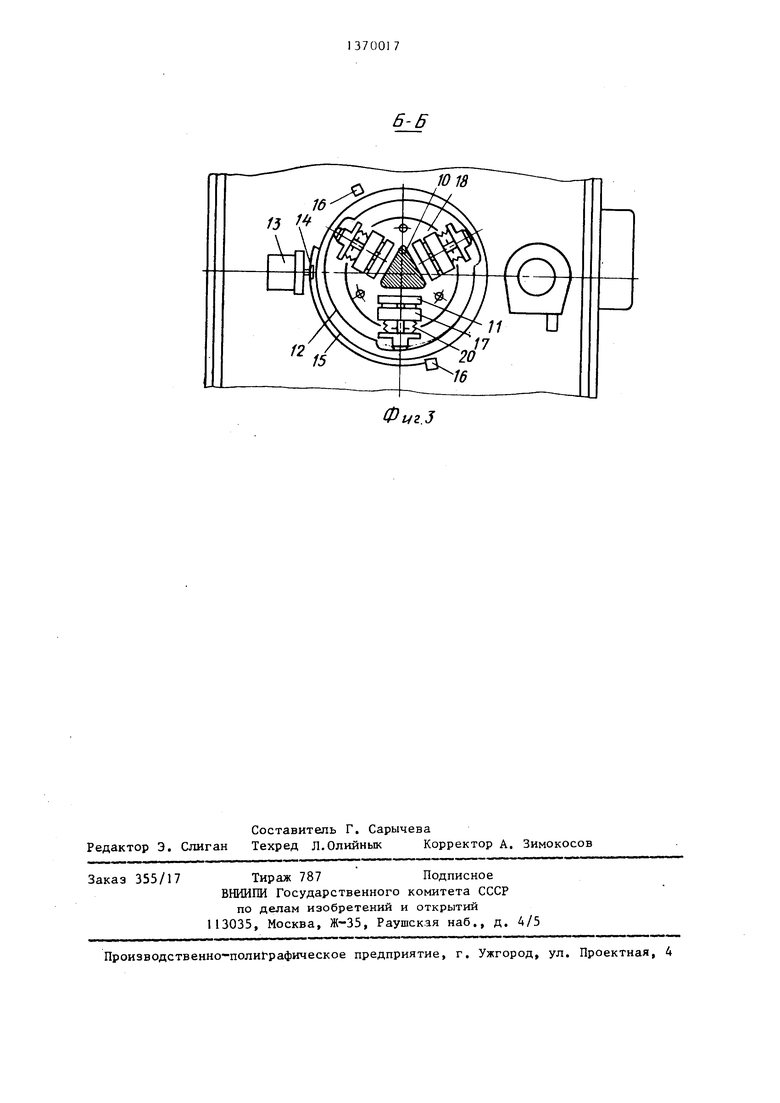
На фиг. 1 схематически изображен телескопический захват с плавающей платформой, поперечный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. I.
Телескопический захват с плавающей платформой содержит неподвижную 1 и промежуточную 2 секции, основани грузонесущей секции 3, привод промежуточной секции 4, блок шестерен 5, установленный на промежуточной секции 2 и взаимодействующий с зубчатой рейкой 6, закрепленной на неподвижной секции 1 и с зубчатой рейкой 7, закрепленной на основании грузонесущей секции 3. На основании секции 3 закреплен вкладьш 8 из антифрикционного материала, который имеет поверхность скольжения. На поверхность скольжения опирается грузонесущая платформа 9, которая имеет в центральной части трехгранную призму 10, предназначенную для фиксирования гру эонесущей платформы. С гранями трехгранной призмы взаимодействуют три толкателя 11, расположенные в горизотальной плоскости под углом 120° дру к другу, на которые в свою очередь воздействует кулачок 12. Кулачок приводится во вращение реверсивньсм электродвигателем 13 с редуктором через коническую передачу, состоящую из зубчатого колеса 14 и зубчатого сектора 15, установленного на кулачке 12. Угол поворота кулачка 12 ограничен при помощи концевых выключателей 16. Толкатели 11 установлены в напра ляющих 17, закрепленных на промежуточном основании 18, которое при помощи стоек 19, проходящих через пазы в кулачке 12, крепится к основани грузонесущей секции 3. Толкатели 11 поджимаются к рабочим поверхностям кулачка 12 пружинами 20.
Толкатели 11, кулачок 12, электродвигатель 13, зубчатое колесо 14, зубчатый сектор 15, направляющие 17, промежуточное основание 18, стойки ,19, пружины 20, подшипник 21 и ось 22 в совокупности с трехгранной призмой
10 образуют механизм фиксирования грузонесущей платформы 9.
Система жидкостной смазки поверх- ности скольжения состоит из мембранного насоса 23 с малосборником, гибкого маслопровода 24, соединяющего выходной штуцер насоса с системой масляных каналов 25 грузонесущей платформы 9, которые равномерно распределяют жидкую смазку по поверхности скольжения, системы масляных каналов, собирающих жидкую смазку, стекающую с поверхности скольжения и направляющих ее в маслосборник насоса, и кулачка 26, установленного на промежуточной секции и взаимодействующего с толкателем насоса 23.
Кроме того, на основании грузонесущей секции 3 имеются пружины 27 с регулируемым усилием натяжения, которые взаимодействуют с грузонесущей платформой 9.
По углам основания грузонесущей секции 3 установлены шаровые опоры 28, расстояние опорных точек которых до плоскости грузонесущей платформы может регулироваться. На опорах стеллажа имеются фиксаторы 29.
Телескопический захват с плавающей платформой работает следующим образом.
В процессе перемещения краном-шта- белером грузовая единица располагает-
СИ на грузонесущей платформе 9, которая находится в зафиксированном состоянии, а именно кулачок 12 повернут по часовой стрелке в крайнее положение и, воздействуя через толкатели 11 на трехгранную призму 10 грузонесущей платформы 9, фиксирует ее в номинальном положении. В момент установки грузовой единицы на заданную позицию кулачок 12 при помощи электродвигателя 13 поворачивается против часовой стрелки в другое крайнее положение, толкатели 11 отводятся пружинами 20 от граней трехгранной призмы 10. Таким образом грузонесущая платформа 9 с находящейся на ней грузовой единицей имеет возможность свободно перемещаться в горизонтальной плоскости относительно основания. Под воздействием, например, направляющих, расположенных на заданной позиции, грузовая единица перемещается совместно с грузонесущей платформой 9 в горизонтальной плоскости и
происходит компенсация погрешности позиционирования грузовой единицы. После освобождения грузонесущей платформы от грузовой единицы кулачок 12 поворачивается электродвигателем 13 по часовой стрелке, толкатели 11, перемещаясь в направлении к трехгранной призме 10, воздействуют на ее грани и перемещают грузоне- сущую платформу 9 в номинальное положение и фиксируют ее.
Смазка поверхности скольжения осуществляется следующим образом. В момент выдвижения грузонесущей секции телескопического захвата кулачок 26, установленный на промежуточной секции 2, воздействует на толкатель насоса 23. Порция жидкой смазки поступает из насоса по гибкому маслопроводу 24 в систему каналов 25 грузонесущей платформы, где она равномерно распределяется по поверхности скольжения. Лишняя смазка, стекая с поверхности скольжения, по системе каналов основания направляется самотеком в маслосборник насоса 23.
Пружины 27, воздействуя на грузо- несущую платформу 9, способствуют перемещению ее в номинальное положение, тем самым облегчая условия работы механизма фиксирования грузонесущей платформы.
Шаровые опоры 28 ограничивают перемещение грузовой единицы в верти кальном направлении, повьппая устой- |Чивость ее в процессе перемещения краном-штабелером.
При перемещении грузовой единицы совместно с грузонесущей платформой
174
9 в горизонтальной плоскости в момент компенсации погрешности позиционирования шаровые опоры 28 сопротивления перемещению не оказывают. Регулируются шаровые опоры по высоте таким образом, чтобы оставался небольшой зазор между опорной точкой шаровой опоры и поверхностью грузовой единицы.
5
0
5
0
35
40
Формула изобретения
I. Телескопический захват, преимущественно для стеллажных кранов-шта- белеров, содержащий кинематически связанные между собой и с неподвижной секцией промежуточную и грузонесущую секции и привод их вьдвижения, о т- личающийся тем, что, с целью повьш1ения точности позиционирования, он снабжен плавающей грузонесущей платформой, опирающейся посредством вкладьш1а из антифрикционного материала на верхнкио поверхность грузонесущей секции, и механизмом фиксации грузонесущей платформы относительно последней, включающим в себя закрепленную на нижней поверхности грузонесущей платформы трехгранную пр изму, приводной поворотный кулачок и подпружиненные толкатели, установленные с возможностью контактирования одними рабочими поверхностями с кулачком, а другими - с гранями трехгранной призмы.
2. Захват по п. 1, отличающийся тем, что он снабжен упругими элементами, соединяющими плавающую грузонесущую платформу с грузонесущей секцией.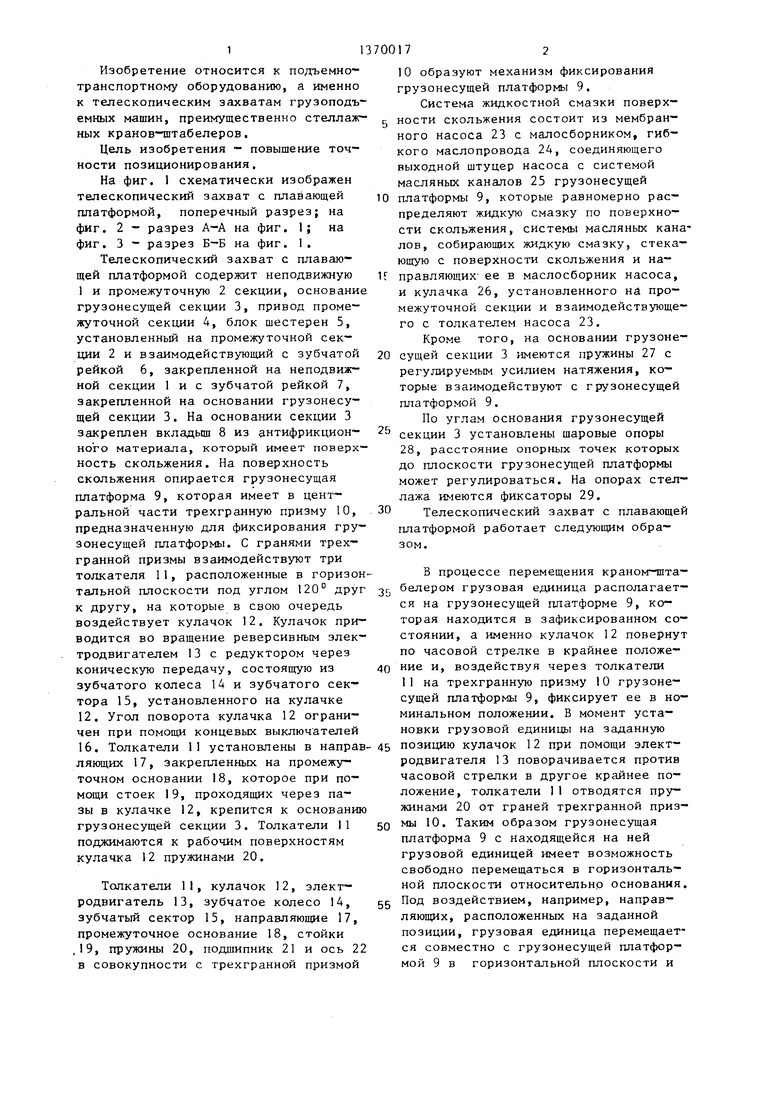

| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНЕШНЕГО И ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2202701C2 |
| Телескопический захват крана-штабелера | 1985 |
|
SU1331748A1 |
| Грузоподъемная площадка крана-штабелера | 1986 |
|
SU1402512A1 |
| Телескопический захват грузоподъемной машины | 1989 |
|
SU1742168A1 |
| Пространственная транспортная система | 1981 |
|
SU982991A1 |
| Грузоподъемное устройство крана | 1986 |
|
SU1440858A1 |
| Параллелограмный подъемник | 1985 |
|
SU1641768A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Устройство для ремонта футеровки металлургических агрегатов | 1979 |
|
SU877299A1 |
| Тележка для перевозки штучных грузов | 1985 |
|
SU1348253A1 |
Изобретение относится к подъемно-транспортному машиностроению. Цель изобретения - повышение точности позиционирования. Телескопический захват содержит неподвижную 1, промежуточную 2, грузонесущую 3 секции и привод промежуточной секции. Грузо- несущая секция снабжена грузонесу- S в щей штатформой 9, которая имеет возможность свободного перемещения в горизонтальной плоскости относительно секции 3 или может быть зафиксирована неподвижно при помощи механизма фиксации, встроенного в грузонесущую секцию 3. При перемещении грузовой единицы грузонесущая платформа 9 находится в зафиксированном состоянии, при установке грузовой единицы на заданную позицию грузонесущая платформа 9 расфиксируется и вместе с грузовой единицей имеет возможность свободного перемещения относительно телескопического захвата в заданных пределах под действием, например, направляющих, установленных на заданной позиции . 1 3.п. ф-лы, 3 ил. 7. 49 23 26 29 сл со 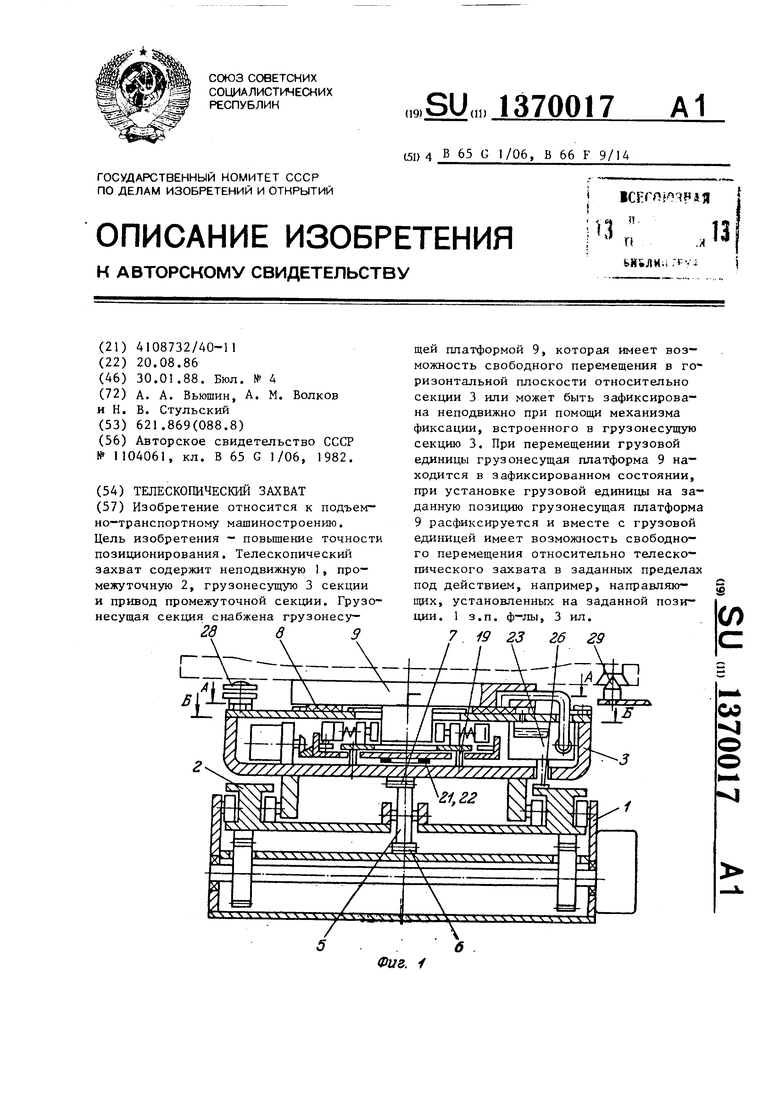
Фт.З
| Телескопический захват (его варианты) | 1982 |
|
SU1104061A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
