//7///// / У/////ЛУ/ У//
1370033
Изобретение относится к подъемно10 д
транспортному оборудованию и может быть использовано при гальванической обработке для загрузки длинномерных цилиндрических деталей в ванны.
Целью изобретения является повы- ше1ше производительности путем сокращения времени на крепление деталей с захватом подвески в горизонтальном положении поворотной рамы.
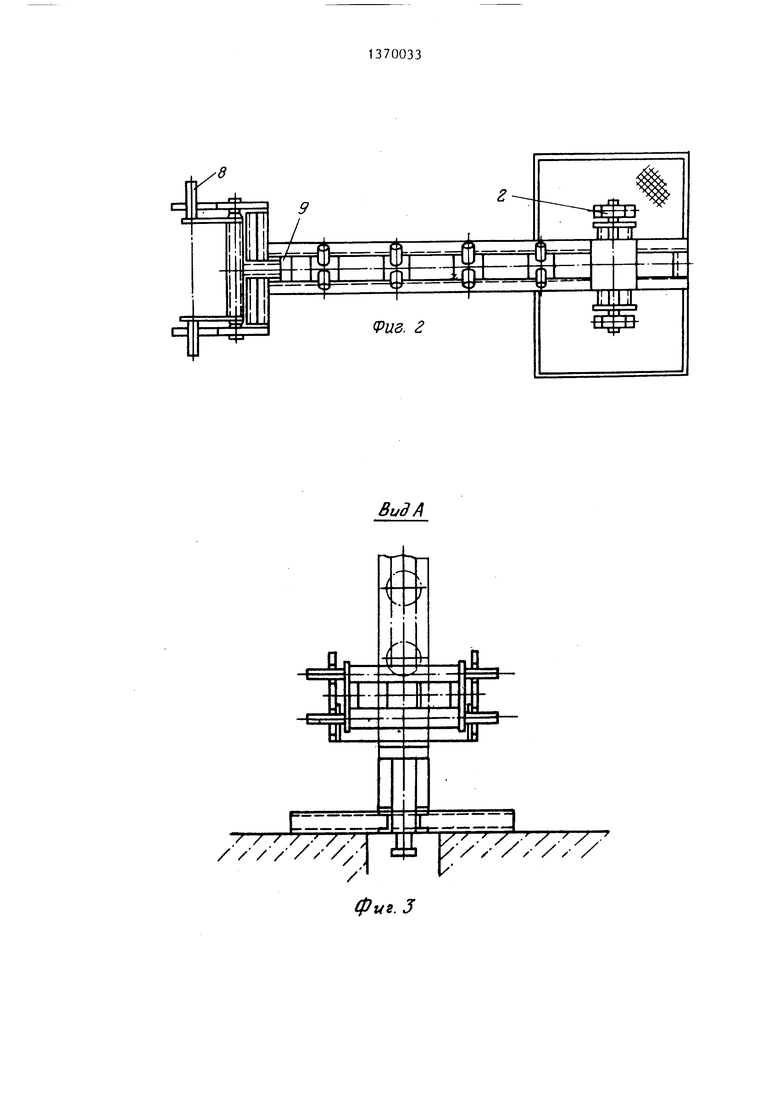
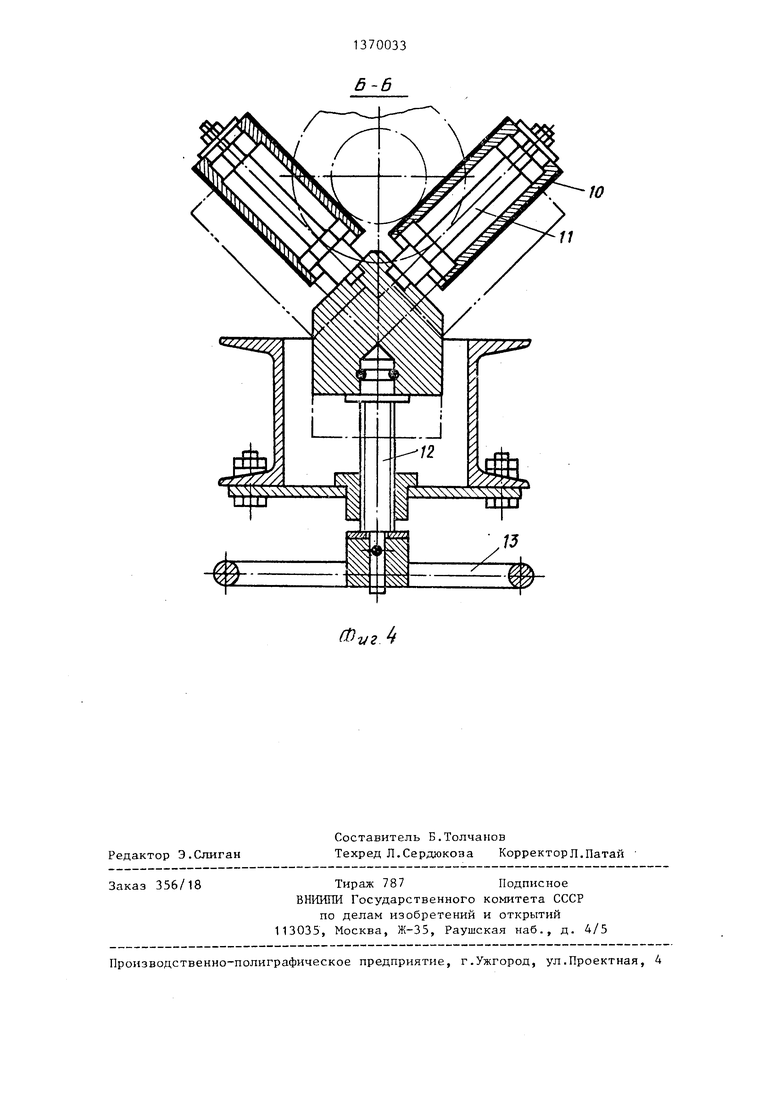
На фиг.1 схематически изображено предлагаемое устройство, общий вид; на фиг. 2 - то же, вид в плане; на фиг, 3 - вид А на фиг. 1; на фиг. 4- ,разрез Б-Б на фиг. 1.
Устройство содержит опору 1, опорные элементы 2 вращения, на которых смонтирована поворотная рама 3. Рама 3 с помоп;ью шарнира А соединена с силотзым цилиндром 5, шарнирно закрепленным на опоре 1. На раме 3 установлены опорные призмы 6 и ложементы 7 для установки транспортной подвески
8с захватом 9 для деталей. Опорная призма 6 представляет собой обрези- ненные ролики 10, смонтированные на осях 11. УГОЛ между осями роликов
10 составляет 90°. Соосность захвата
9с деталью осуществляется механизмами регулировки расстояния между установочными призмами 6 и рамой 3 путем перемещения опорных призм 6 вверх или вниз винтом 12 с маховиком 13.
Устройство работает следующим образом.
В горизонтальном положении поворотной рамы 3 в ложементы 7 устанавливается транспортная подвеска 8 с захватом 9, на опорные призмы 6 укла- дьтается деталь, подлежащая обработке, и производится ее фиксация с захватом 9 транспортной подвески 8, после чего подается команда на поворот рамы с деталью.
С помощью силового цилиндра 5, шарнирно закреплённого на опоре 1, поворотная рама 3 с установленной в ложементах 7 транспортной подвески 8, соединенной захватом 9 с деталью, переводится в вертикальное положение. При достижении рамой 3 вертикального положения от датчика (не показан) по- дается команда автооператору, обслуживающему линию гальванопокрытий.
Автооператор (не показан) снимает транспортную подвеску 8 с деталью и транспортирует ее по технологическим позициям. При поступлении на ложементы 7 транспортной подвески 8 с обработанной деталью, разгрузка ее осуществляется в обратном порядке.
Далее цикл загрузки транспортной подвески 8 очередной деталью повторяется. Формула изобретения
1 . Устройство для загрузки и раз-- грузки автооператора, включающее шарнирно установленную на опоре поворотную раму с установочными призмами для деталей и ложементами для транспортной подвески, выполненной с захватом для деталей, и шарнирно сое- диненный с .опорой и поворотной рамой силовой цилиндр, отлич.ающе- е с я тем,-что, с целью повышения производительности путем сокращения времени на крепление деталей с захватом подвески и горизонтальном положении поворотной рамы, оно снабжено механизмами регулировки расстояния между установочными призмами и поворотной рамой,а каждая из установочных призм выполнена в виде двух расположенных под углом друг к другу роликов .
2. Устройство по п.1, о т л и - чающееся тем, что ролики вы- полнены обрезиненными. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Кантователь для загрузки и разгрузки автооператора автоматической линии | 1980 |
|
SU865747A1 |
| УСТАНОВКА ХОЛОДНОЙ НАПРЕССОВКИ (ВАРИАНТЫ) | 2012 |
|
RU2496627C1 |
| Автоматизированная линия для термообработки изделий | 1982 |
|
SU1071649A1 |
| Устройство для подвески деталей в гальванических ваннах | 1987 |
|
SU1444404A1 |
| УСТАНОВКА ХОЛОДНОЙ НАПРЕССОВКИ (ВАРИАНТЫ) | 2013 |
|
RU2526349C1 |
| Грузоподъемное устройство для погрузки и выгрузки длинномерных железнодорожных рельсов | 2022 |
|
RU2786660C1 |
| ТРАНСПОРТНО-УСТАНОВОЧНЫЙ АГРЕГАТ СТАРТОВОГО РАКЕТНОГО КОМПЛЕКСА | 2011 |
|
RU2478539C2 |
| Зажимной механизм | 1981 |
|
SU992135A1 |
| Автоматическая линия | 1986 |
|
SU1465263A1 |
| Автомат для запрессовки | 1981 |
|
SU994195A1 |
H3o6peTeraie относится к подъемно-транспортному оборудованию и м.б. использовано при гальванической обработке для загрузки длинномерных цилиндрических деталей в ванны. Цель изобретения - повышение произв-сти путем сокращет1я времени на крепление деталей (Д) с захватом подвески в горизонтальном положении поворотной рамы (Р). На опоре 1 шарнирно установлена Р 3. Последняя шарниром 4 соединена с шарнирно установленным на опоре 1 силовым цили1щром 5. На Р 3 размещены.установочные призмы (П) 6 и ложементы 7 для установки транспортной подвески 8 с захватом 9 для Д. Каждая из П 6 выполнена в виде двух обрезиненных роликов. Угол между осями роликов составляет 90. Соосность захвата 9 с Д осуществляется механизмами регулировки расстояния между П 6 и Р 3 путем перемеще- 1шя П 6 вверх или вниз винтом с маховиком. В горизонтальном положении Р 3 в ложементы 7 устанавливают подвеску 8 с захватом 9. На П 6 укладывают подлежащую обработке Л и фиксируют с захватом 9. Переводят Р 3 с помощью цилиндра 5 в вертикальное положение. Снимают подвеску 8 с Д и транспортируют ее по технологическим позициям. 1з.п. ф-лы, 4 ил. сл 00 со со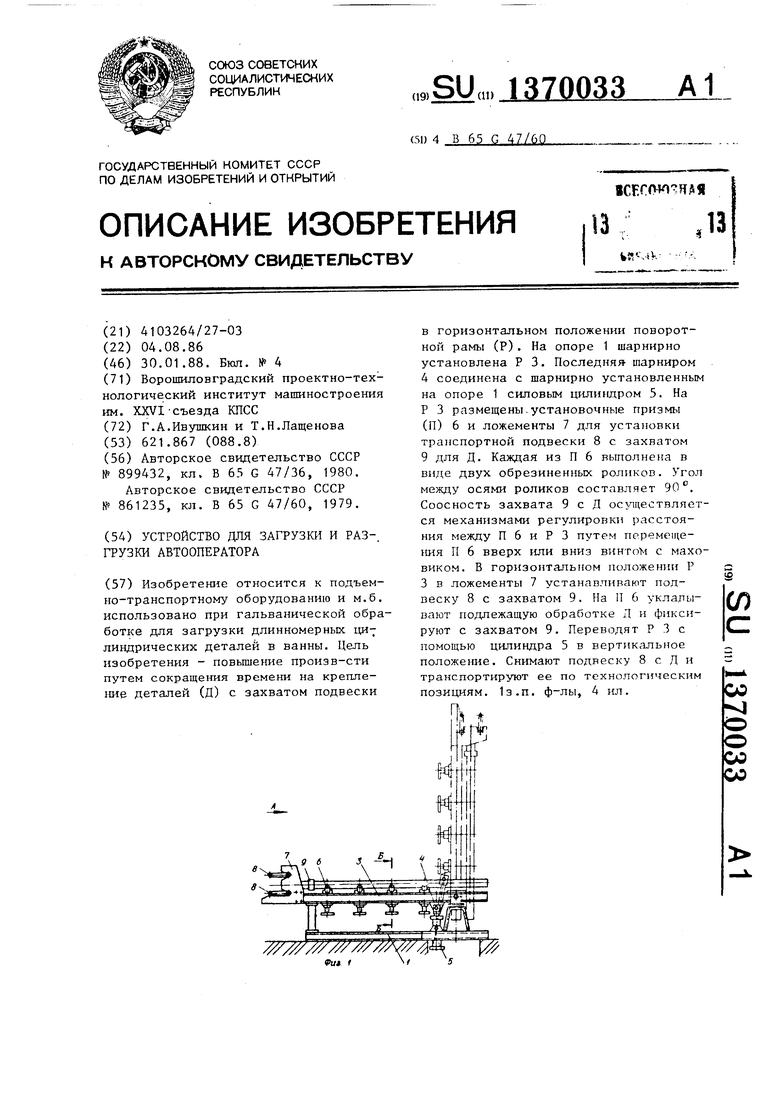
В ид А
Фг49.3
| Устройство для съема и навешивания пакета длинномерных изделий на подвесной конвейер | 1980 |
|
SU899432A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для загрузки пакета длинномерных изделий на подвесной конвейер | 1979 |
|
SU861235A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
