Фиг.Г
верхности трубопровода 8 дистанционно управляемых опорах. Это достигается введением второго измерителя 7 со штоком 10, кольцевых направляющих 2 с шариками 3, сепараторами А и подвижной кареткой 5 с измерителя ш 6 и 7 на концах, привода перемещения каретки 5 с электродвигателем, постоянным фрикционным тормозом и двумя приводными шкивами, двух направляющих роликов, двух гибких лент 17 и 18, концы которых соединены с крайними точками каретки и через на- правля1ои1ие ролики 15 и 16 - с приводными шкивами, а также выполнением закрепленных на концах наиравляюпщх 2 с.чмоустанав пшаюпгихся опор и штоков
9 п 10 измерителей 6 и 7 в виде подпружиненных толкателей 23 с якорями 24 и обмотками 25 электромагнитов. Измерения проводят при зафиксирован- 1ых на трубопроводе В опорах перемещением подвижной каретки 5 с периодическим опусканием штоков 9 и 10 измерителей 6 и 7 на поверхность трубопровода, для чего включают и выключают электродви1 атель и обмотки 25 электромагнитов штоков 9 и Ю. Устройство позволяет оперативно контролировать трубопроводы в местах с ограниченным доступом и предотвращать их аварийное разрушение при иопрастании остаточных деформаций. 1 3.п. ф-лы, 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИИ ПРОФИЛЯ ЛОПАТОК И СТЕРЖНЕЙ ОХЛАЖДАЕМЫХ ЛОПАТОК ТУРБИН | 2001 |
|
RU2205363C2 |
| ЛЕНТОШЛИФОВАЛЬНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ ПРОФИЛЕЙ В ЗОНЕ СВАРНЫХ СТЫКОВ | 1966 |
|
SU216466A1 |
| ЛЕНТОЧНО-ОТРЕЗНОЙ СТАНОК___.4,J | 1971 |
|
SU308823A1 |
| Устройство для перемещения и укладки плоских деталей | 1990 |
|
SU1740288A1 |
| Привод каретки графопостроителя | 1982 |
|
SU1167431A1 |
| СТАНОК ШЛИФОВАЛЬНЫЙ ШИРОКОЛЕНТОЧНЫЙ | 2001 |
|
RU2182073C1 |
| Стенд для сборки и сварки кольцевых швов роторов турбин | 1988 |
|
SU1574421A1 |
| Устройство для разбраковки п-образных ферритовых сердечников | 1972 |
|
SU449374A1 |
| Устройство активной подачи нити для трикотажных машин | 1990 |
|
SU1730262A1 |
Изобретение относится к электромеханическим средствам измерения деформаций. Цель изобретения - расширение области применения устройства в условиях ограниченного доступа к контролируемому объекту за счет дистанционно управляемого перемещения малогабаритных измерителей перемещения (по одному нз вариантов - индуктивных) по круговой траектории на угол до 90 в каждую сторону от среднего положения при зафиксированных на по(Л 00 4 :л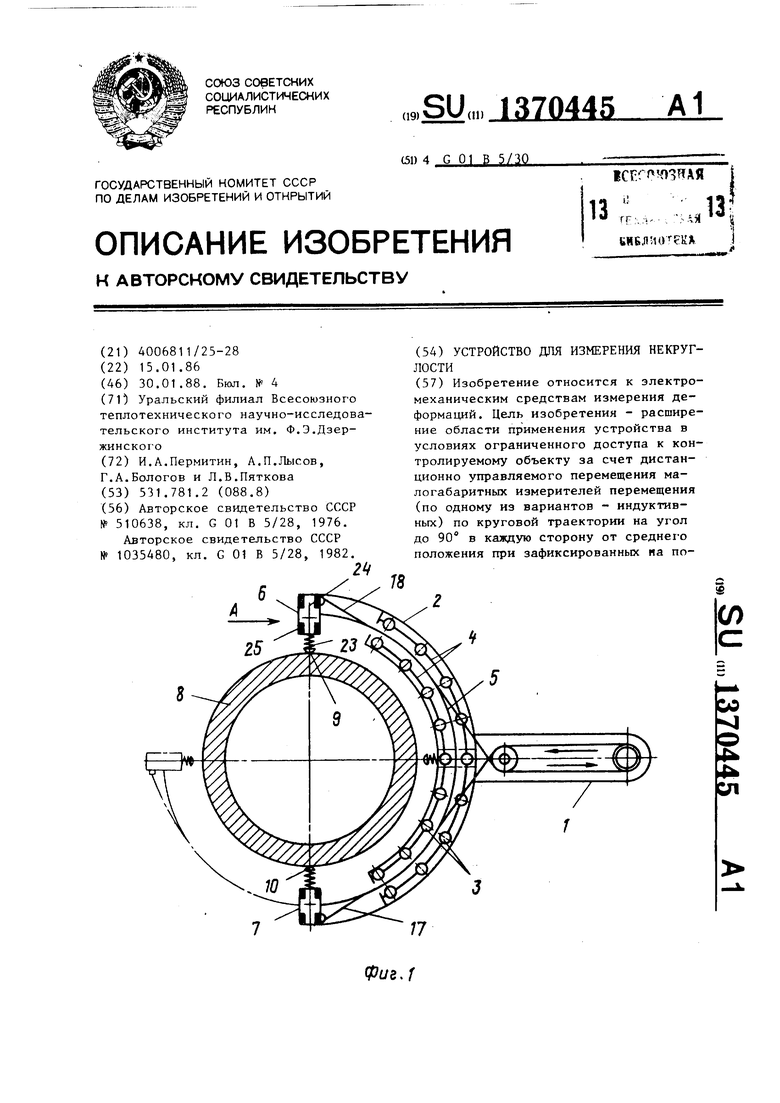
Изобретение относится к измерительной технике, а именно к электромеханическим средствам измерения деформаций, и может быть использовано для контроля деформаций трубо- проБодов, например паропроводов или их гпбов, J3 процессе их эксплуатации
Целью изобретения является расширение области применения устройства в условиях oi-раниченного доступа к контролируемому объекту путем обеспечения дистанционно управляемого перемещения малогабаритных измерителей по круговой траектории на угол до 90° в Каждую сторону от среднего положения при зафиксированных на поверхности трубопровода дистанционно управляемых опорах.
Поставленная цель достигается введением второго измерителя со штоком, кольцевых направляющих с шариками, сепараторами и подвижной кареткой с измерителями на концах, привода перемещения каретки с электродвиг ате- лем, фрикционным тормозом и двумя приводными шкивами,- двух направляющих роликов, двух гибких лент, концы которых соединены с крайними точками каретки и через направляющие ролики с приводными шкивами, а также выполнением закрепленных на концах напранляющ1гх самоустанавливаюпщхся опор и штоков измерителей в виде подпружиненных толкателей с якорями и обмотками электромагнитов, а самих измерителей - в виде индуктивных датчиков перемещения.
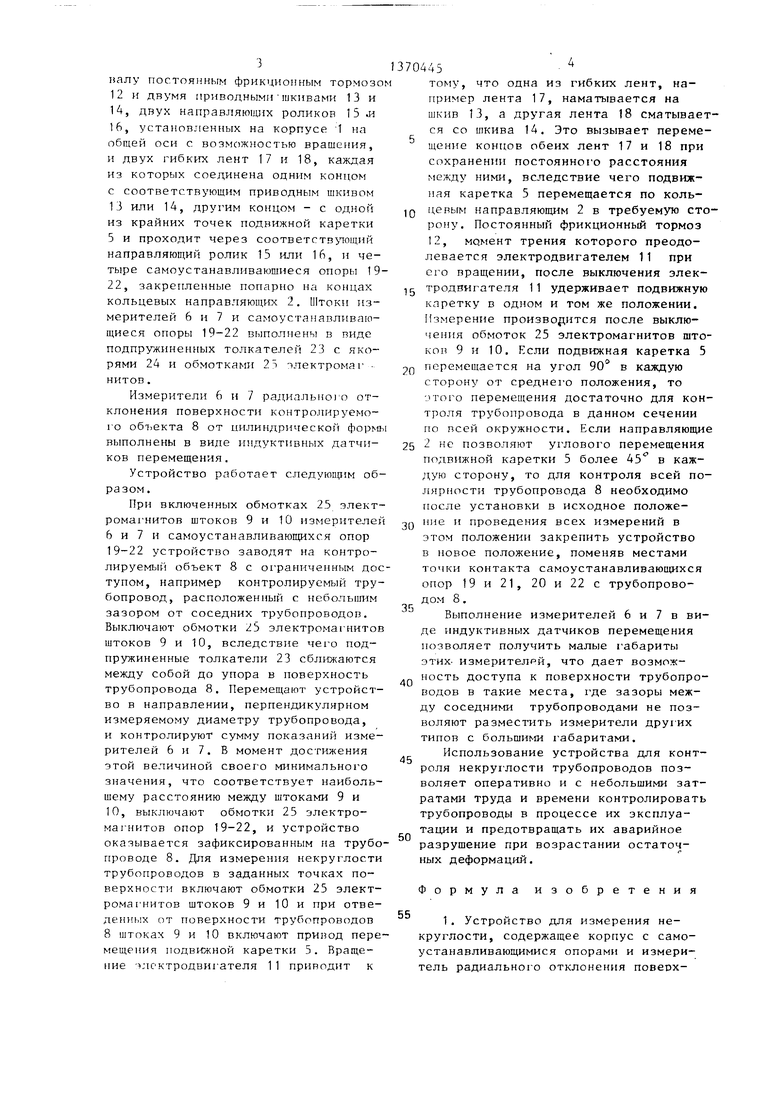
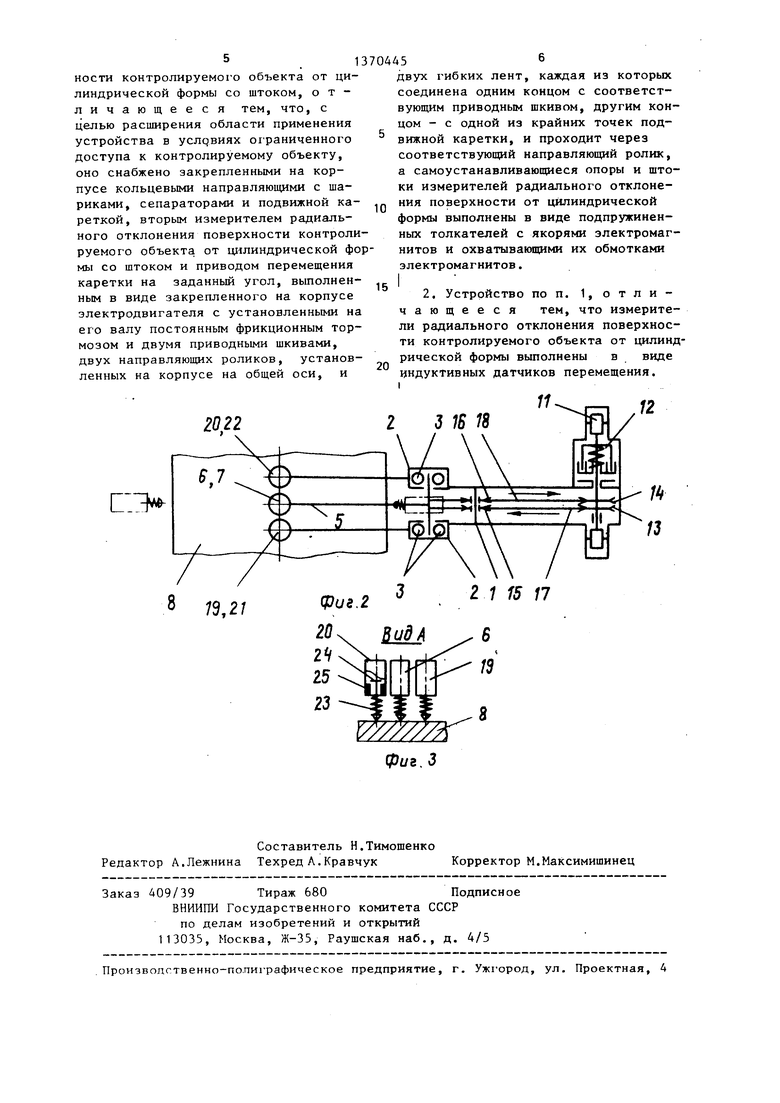
На фиг. 1 представлена кинематическая схема предлагаемого устройства; на фиг. 2 - схема расположения элементов привода каретки устройства и опор с измерителем в направлении, параллельном оси трубопровода; на фиг. 3 - опоры и измеритель радиального отклонения при установке устройства на объект, вид сбоку.
Устройство для измерения некруглости содержит корпус 1 с закрепленными на корпусе кольцевыми направляющими 2, размещенные в дсольцевых направляюшдх 2 шарики 3, сепараторы 4 шариков 3 и подвижную каретку 5, установленную с возможностью перемещения по направляющим 2 на угол до 90° в каждую сторону от среднего положения, два измерителя 6 и 7 ради- ально о отклонения поверхности конт- ролируемог о объекта 8 от цилиндрической формы со штоком 9 и 10, установленных в крайних точках подвижной каретки 5, привод перемещения каретки на заданный угол, выполненный в виде закрепленного на корпусе 1 электродвигателя 1 1 с установленными на ег о
3
валу постоянным фрикционным тормозо
12и двумя приводными-шкивами 13 и 14, двух направляю1Щ1х роликов 15 л 16, установленных на корпусе 1 на общей оси с возможностью вращения, и двух гибких лент 17 и 18, каждая из которых соединена одним концом
с соответствующим приводным щкивом
13или 14, другим концом - с одной из крайних точек подвижной каретки
5и проходит через соответств псщий направляющий ролик 15 или 16, и четыре самоустанавливаюшиеся опоры 19 22, закрепленные попарно на концах кольцевых направляющих 2. Штоки измерителей 6 и 7 и самоустанавливаго- щиеся опоры 19-22 выполнены в виде подпружиненных толкателей 23 с якорями 24 и обмотками 23 электромаг - нитов.
Измерители 6 и 7 радиально1 о отклонения поверхности контролируемого o6ijeKTa 8 от пилиндрической формы выполнены в виде индуктивных датчиков перемещения.
Устройство работает следуюпр1м образом.
При включенных обмотках 25 электромагнитов штоков 9 и 10 измерителей
6и 7 и самоустанавливающихся опор 19-22 устройство заводят на контролируемый объект 8 с ограниченным доступом, например контролируемый трубопровод, расположенный с небольшим зазором от соседних трубопроводов. Выключают обмотки 25 электромагнитов штоков 9 и 10, вследствие чего подпружиненные толкатели 23 сближаются между собой до упора в поверхность трубопровода 8. Перемещают устройство в направлении, перпендикулярном измеряемому диаметру трубопровода,
и контролируют сумму показаний измерителей 6 и 7. В момент достижения этой величиной своего минимального значения, что соответствует наибольшему расстоянию между штоками 9 и 10, выключают обмотки 25 электро- Mai HHToB опор 19-22, и устройство оказывается зафиксированным на трубопроводе В. Для измерения некруглости трубопроводов в заданных точках поверхности включают обмотки 25 электромагнитов штоков 9 и 10 и при отведенных от поверхности трубопроводов 8 штоках 9 и 10 включают прИ1вод перемещения подвижной каретки 5. Вращение -электродвигателя 1 1 приводит к
70445
тому, что одна из гибких лент, например лента 17, наматывается на шкив 13, а другая лента 18 сматывается со шкива 14. Это вызывает перемещение концов обеих лент 17 и 18 при сохранении постоянного расстояния eждy ними, вследствие чего подвижная каретка 5 перемещается по коль- 10 цевым направляющим 2 в требуемую сторону. Постоянный фрикционный тормоз 12, MQMBHT трения которого преодолевается электродвигателем 11 при его вращении, после выключения элек- 15 тродвигателя 11 удерживает подвижную каретку в одном и том же положении. Измерение производится после выключения обмоток 25 электромагнитов штоков 9 и 10. Если подвижная каретка 5 2Q перемешается на угол 90° в каждую сторону от среднего положения, то итого перемещения достаточно для контроля трубопровода в данном сечении по всей окружности. Если направляющие 25 2 не позволяют углового перемещения подвижной каретки 5 более 45 в каждую сторону, то для контроля всей по- лярЕюсти трубопровода 8 необходимо после установки в исходное положе- Q и проведения всех измерений в этом положении закрепить устройство в новое положение, поменяв местами точки контакта самоустанавливающихся опор 19 и 21, 20 и 22 с трубопроводом 8.
Выполнение измерителей 6 и 7 в виде индуктивных датчиков перемещения позволяет получить малые 1 абариты этих, измерителрй, что дает возможность доступа к поверхности трубопроводов в такие места, где зазоры между соседними трубопроводами не позволяют разместить измерители других типов с большими 1 абаритами.
Использование устройства для контроля некруг лости трубопроводов позволяет оперативно и с небольшими затратами труда и времени контролировать трубопроводы в процессе их эксплуатации и предотвращать их аварийное разрушение при возрастании остаточных деформаций.
Формула изобретения
0
5
0
5
ности контролируемого объекта от цилиндрической формы со штоком, отличающееся тем, что, с целью расширения области применения устройства в условиях ограниченного доступа к контролируемому объекту, оно снабжено закрепленными на корпусе кольцевыми направляющими с шариками, сепараторами и подвижной ка- реткой, вторым измерителем радиального отклонения поверхности контролируемого объекта от цилиндрической фомы со штоком и приводом перемещения каретки на заданный угол, выполнен- ным в виде закрепленного на корпусе электродвигателя с установленными на его валу постоянным фрикционным тормозом и двумя приводными шкивами, двух направляющих роликов, установ- ленных на корпусе на общей оси, и
Г.1
двух гибких лент, каждая из которых соединена одним концом с соответствующим приводным шкивом, другим концом - с одной из крайних точек подвижной каретки, и проходит через соответствующий направляющий ролик, а самоустанавливающиеся опоры и штоки измерителей радиального отклонения поверхности от цилиндрической формы выполнены в виде подпружиненных толкателей с якорями электромагнитов и охватывающими их обмотками электромагнитов.
2, Устройство по п. 1, отличающееся тем, что измерители радиального отклонения поверхности контролируемого объекта от цилиндрической формы выполнены в виде индуктивных датчиков перемещения.
(///////Л
фиг. 3
| Устройство для измерения некруглости | 1971 |
|
SU510638A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения некруглости | 1982 |
|
SU1035480A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
