Изобретение относится к машиностроению, конкретнее к манипуляторам и роботам.
Цель изобретения - повышение точности позиционирования конечного звена путем обеспечения компенсации упругой деформации телескопических звеньев под действием силы их тяжести и приложенной к ним полезной нагрузки.
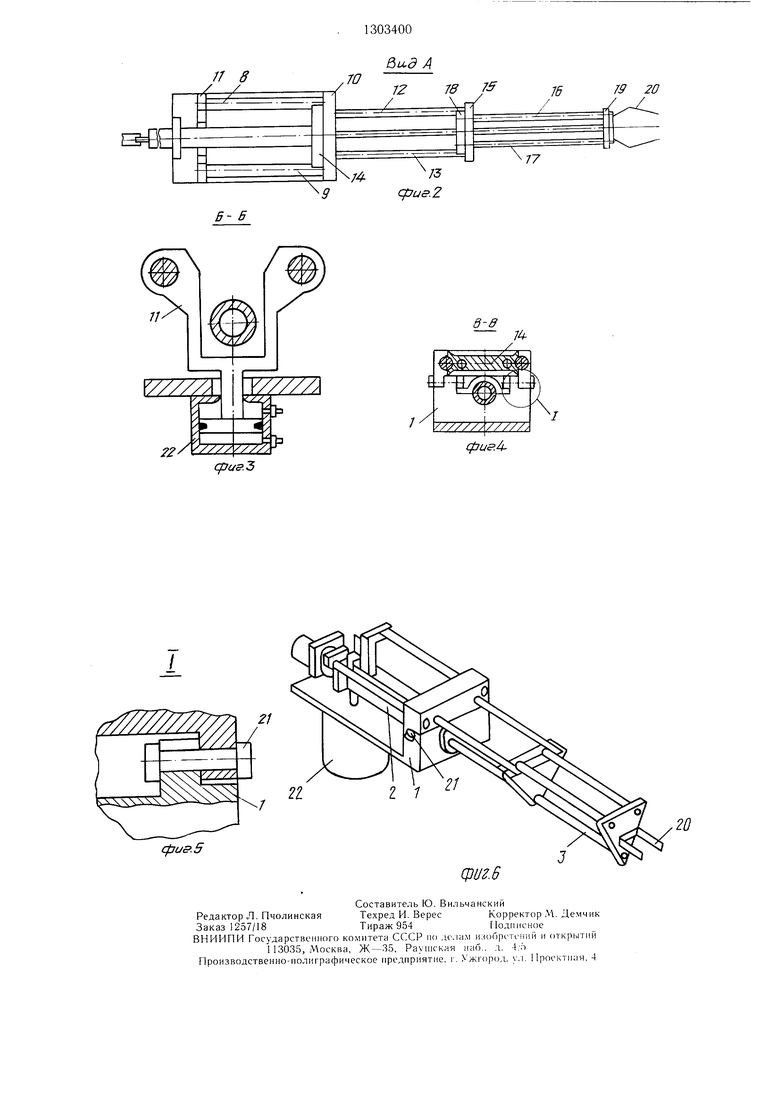
На фиг. 1 показана рука в крайнем выдвинутом положении; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - узел I на фиг. 4; на фиг. 6 - рука, изометрия.
Рука манипулятора имеет корпус 1. Нижний пояс руки содержит силовой цилиндр 2 со штоком 3 и датчиком 4, верхний пояс представляет собой телескопические выдвижные звенья 5-7.
Первое звено 5 состоит из параллельных стержней 8 и 9, которые одним концом жестко связаны поперечиной 10, а другим - кронштейном 11. Стержни 8 и 9 являются направляюшими для последующего звена 6, которое состоит из параллельных стержней 12 и 13, левые концы которых жестко связаны поперечиной 14, а правые - поперечиной 15. Стержни 12 и 13 являются направляющими для последующего звена 7, которое состоит из параллельных стержней 16 и 17, левые концы которых связаны поперечиной 18, а правые - ригелем 19. Ригель 19 жестко связывает верхний и нижний поясы, т.е. краевые концы стержней 16 и 17 и конец штока 3. На ригеле 19 крепится схват 20. Верхний пояс руки связан с корпусом 1 шарниром 21, который обеспечивает возможность поворота верхнего пояса руки против часовой стрелки и препятствует его перемещению по часовой стрелке (по направлению действия нагрузки). Рука содержит привод 22 управления деформированным состоянием (деформационный привод). Левый конец верхнего пояса руки жестко связан с деформационным приводом посредством кронштейна 11, верхняя часть которого жестко связана с концами стержней 8-9, а нижняя часть кронштейна - с поршнем привода 22.
Положение штока силового цилиндра 2 контролируется датчиком 4.
Рука манипулятора работает следующим образом.
Программой задается величина линейного перемещения схвата (линейное перемещение) и полезная нагрузка. По сигналу системы управления в силовой цилиндр 2 подается рабочее тело, перемещающее пор- njeHb. Шток, связанный с поршнем и схватом, перемещается вправо, одновременно перемещаются вправо и телескопические выдвижные звенья 6-7. Одновременно подается рабочее тело и в деформационный привод 22. Датчик 4 отслеживает положение поршня, т.е. величину вылета консоли руки
5 и из системы управления подается сигнал, по которому осуществляется перемещение выходного звена деформационного привода 22. Величина этого перемещения изменяется в зависимости от вылета консоли руки при
- заранее заданной массе перемещаемого груза (полезной нагрузки). Под действием деформационного привода левый конец верхнего пояса перемещается вниз, при этом схват 20 приходит в положение, соответствующее заданному недеформированному
5 состоянию телескопических выдвижных звеньев.
Формула изобретения
Рука манипулятора, содержащая кор- 0 пус с направляющими, телескопические выдвижные звенья, смонтированные в этих направляющих, силовой цилиндр, закрепленный в корпусе соосно направляющим, шток которого связан с конечным телескопическим выдвижным звеном, и систему управления, 5 отличающаяся тем, что, с целью повышения точности позиционирования конечного звена за счет компенсации упругой деформации телескопических звеньев под действием силы их тяжести и приложенной к ним полезной нагрузки, направляющие одним своим концом шарнирно соединены с корпусом, а другим концом - с выходным звеном дополнительно введенного привода, установленного в корпусе, при этом система управления снабжена датчиком положения штока силового цилиндра дополнительного привода
Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1980 |
|
SU982896A2 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Схват манипулятора | 1977 |
|
SU633726A1 |
| Манипулятор | 1988 |
|
SU1569222A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Манипулятор | 1982 |
|
SU1065185A1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| Робототехнический комплекс для текущего и капитального ремонта скважин на единой базе | 2019 |
|
RU2736591C1 |
| Захватное устройство | 1984 |
|
SU1220793A1 |
| Манипулятор для монтажно-сборочных работ | 1976 |
|
SU631329A1 |
Изобретение относится к области машиностроения, более конкретно к манипуляторам и роботам. Целью изобретения является повышение точности позиционирования конечного звена за счет компенсации упругой деформации телескопических звеньев под действием силы их тяжести и приложенной к ним полезной нагрузки. При выдвижении П1тока 3 силового цилиндра 2 телескопические выдвижные звенья 5-7 ун- руго деформируются. От датчика, контролирующего положение указанных звеньев и HITO- ка, через систему управления включается привод 22. перемещение выходного звена которого нриводит к новороту звеньев 5-7 вокруг шарнира 21. нри этом схват 20 приходит в положение, соответствующее заданному недеформированному состоянию звеньев 5-7. 6 ил. оо о оо о о
22
в-8
фие .Асриг.З
фи.5
.6
Составитель Ю. Вильчанскнй
Редактор Л. ПчолинскаяТехред И. ВересКорректор .VI. Демчнк
Заказ 1257/18Тираж 954Подписное
ВНИИПИ Государственного комитета СССР ио .имам и:«)брсто1 ий и открытий
1 13035, Москва, Ж-35, Рауи1ская наб.. д. 4;5 Производственно-полиграфическое предприятие, i. Уж|-ор()д. y,i. Проектная. 4
| Рука манипулятора | 1981 |
|
SU975380A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
