(Л
W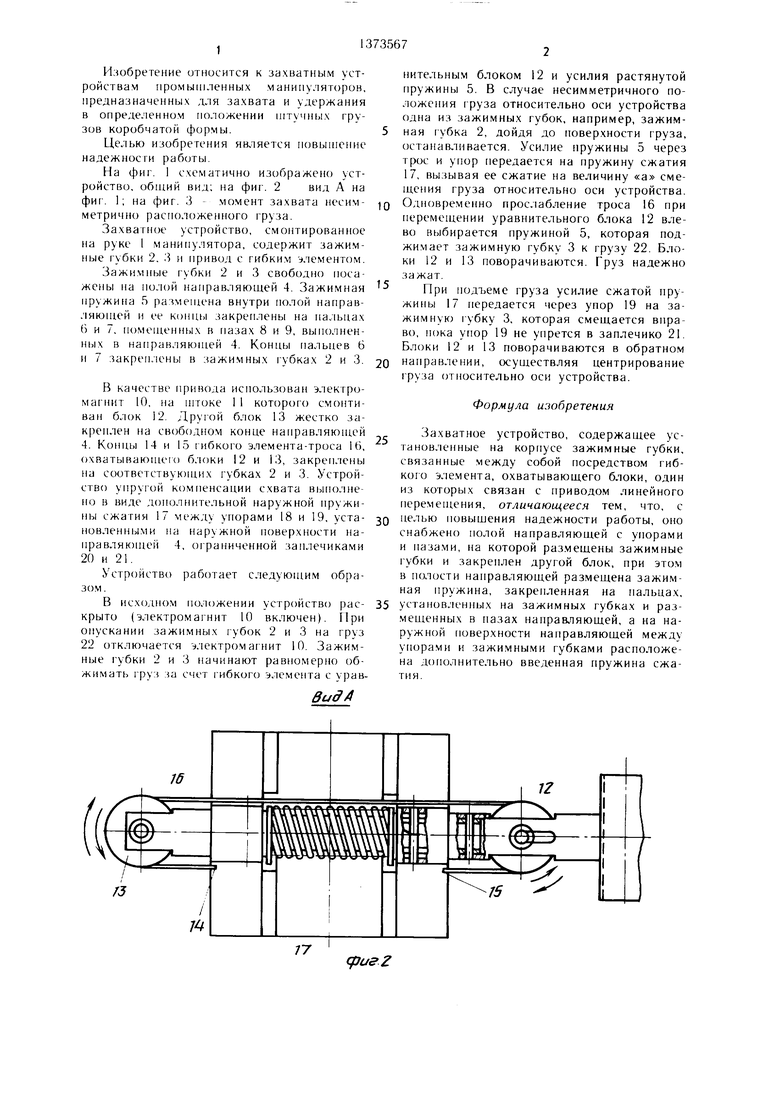
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1981 |
|
SU963852A1 |
| Захватное устройство | 1988 |
|
SU1549748A1 |
| Захватное устройство | 1985 |
|
SU1293021A1 |
| Захватное устройство промышленного робота | 1985 |
|
SU1313697A1 |
| Захватное устройство | 1984 |
|
SU1227465A1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| Захватное устройство | 1985 |
|
SU1298071A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Захватное устройство "Новокомак-Б | 1987 |
|
SU1495120A1 |
| Схват | 1984 |
|
SU1178585A1 |
Изобретение относится к за.хватным устройствам промышленных манипуляторов, предназначенны.х преимущественно для за.хвата штучных грузов коробчатой формы. Це.тьк) изобретения является повышение падеж юсти работы. При опускании руки 1 на груз 22 отключается электромагнит 10. Зажимные губки 2 и 3 начинают обжимать груз посредством перемешен и я гибкого элемента и блока от усилия пружины 5. При несовмеш.ении осей груза и захватного устройства одна из зажимных губок, дойдя до поверхности груза, останавливается. Усилие пружины 5 через гибкий элемент и упор 21 передается на пружину сжатия, вызывая ее деформацию. При подъеме груза усилие сжатой пружины передается через упор 19 на зажимную губку 3, которая, перемешаясь, осуществляет центрирование груза относительно оси устройства. 3 пл.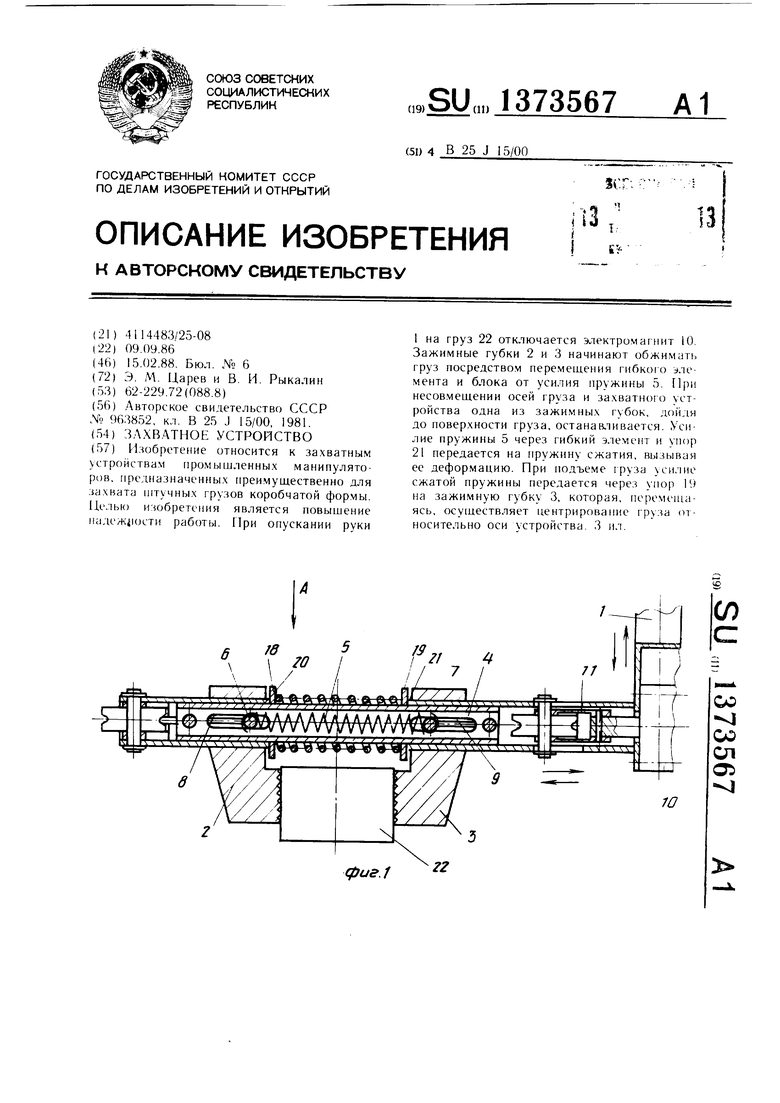
фаг./
Изобретение относится к захватным устройствам промышленных манипуляторов, предназначенных для захвата и удержания в определенном положении штучных грузов коробчатой формы.
Целью изобретения является повышение надежности работы.
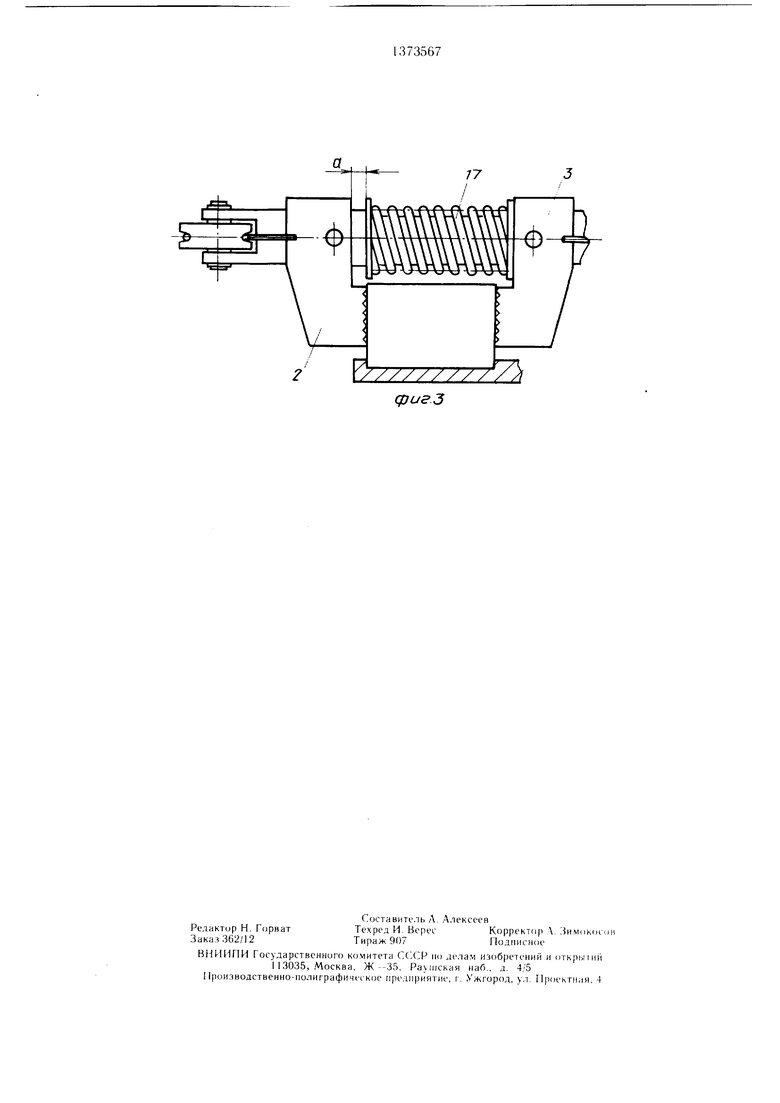
На фиг. 1 схематично изображено устройство, обпшй вид; на фиг. 2 вид А на фиг. 1; на фиг. 3 - момент захвата несим- метрично расположенного груза.
Захватное устройство, смонтированное на руке I манипулятора, содержит зажимные губки 2. 3 и привод с гибки.м элементом.
Зажимиые губки 2 и 3 свободно посажены на полой )1аправляю1цей 4. Зажимная нружина 5 размепи на внутри полой направляющей и ее KoHiU) закреплены на пальпах 6 и 7, помешенных в пазах 8 и 9, выполненных в направляющей 4. Концы пальпев 6 и 7 закреп.чены в зажимных губках 2 и 3.
В качестве привода использован электромагнит 10, на штоке 1 1 которого смонти- ван блок 12. Другой блок 13 жестко за- кренлен на свободном конце направляющей 4. Концы 14 и 15 гибкого элемента-троса 16, охватывающею блоки 12 и 13, закреплены па соответствующих губках 2 и 3. Устройство упругой компенсации схвата выполнено в виде дополнительной наружной пружины сжатия 17 между упорами 18 и 19, уста- новленными на наружной поверхности на- правляюп1ей 4, О1 раниченной заплечиками 20 и 21.
Устройство работает следующим образом .
В исходном положении устройство рас- крыто (электромагнит 10 включен). При опускании зажимных губок 2 и 3 на груз 22 отключается э.тектромагнит 10. Зажимные губки 2 и 3 начинают равномерно обжимать груз за счет гибкого элемента с уравBuff
/J
5
0
5
Q
0
5
5
нительным блоком 12 и усилия растянутой пружины 5. В случае несимметричного положения груза относительно оси устройства одна из зажимных губок, например, зажимная губка 2, дойдя до поверхности груза, останавливается. Усилие пружины 5 через трос и упор передается на пружину сжатия 17, вызывая ее сжатие на величину «а смешения груза относительно оси устройства. Одновременно прослабление троса 16 при перемешении уравнительного блока 12 влево выбирается пружиной 5, которая поджимает зажимную губку 3 к грузу 22. Блоки 12 и 13 поворачиваются. Груз надежно зажат.
При подъеме груза усилие сжатой пружины 17 передается через упор 19 на зажимную губку 3, которая смеш,ается вправо, пока упор 19 не упрется в заплечико 21. Блоки 12 и 13 поворачиваются в обратном направлении, осуществляя центрирование груза относительно оси устройства.
Формула изобретения
Захватное устройство, содержащее установленные на корпусе зажимные губки, связанные между собой посредством гибкою элемента, охватывающего блоки, один из которых связан с приводом линейного перемеп1ения, отличающееся тем, что, с пелью повышения надежности работы, оно снабжено полой направляющей с упорами и пазами, на которой раз.мещены зажимные губки и закреплен другой блок, при это.м в полости направляющей размещена зажимная пружина, закрепленная на пальцах, установ;1ен)1ых на зажимных губках и размешенных в пазах направляющей, а на наружной поверхности направляющей между упорами и зажимными губками расположена дополнительно введенная пружина сжатия.
gjuffZ
77
/////////
дзигз
| Захват промышленного робота | 1981 |
|
SU963852A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
