Изобретение относится к машиностроению и может быть использовано в автоматических манипуляторах, например, для выполнения подъемно-транспортных и монтаж- но-сборочных операций.
Цель изобретения - расширение технологических возможностей.
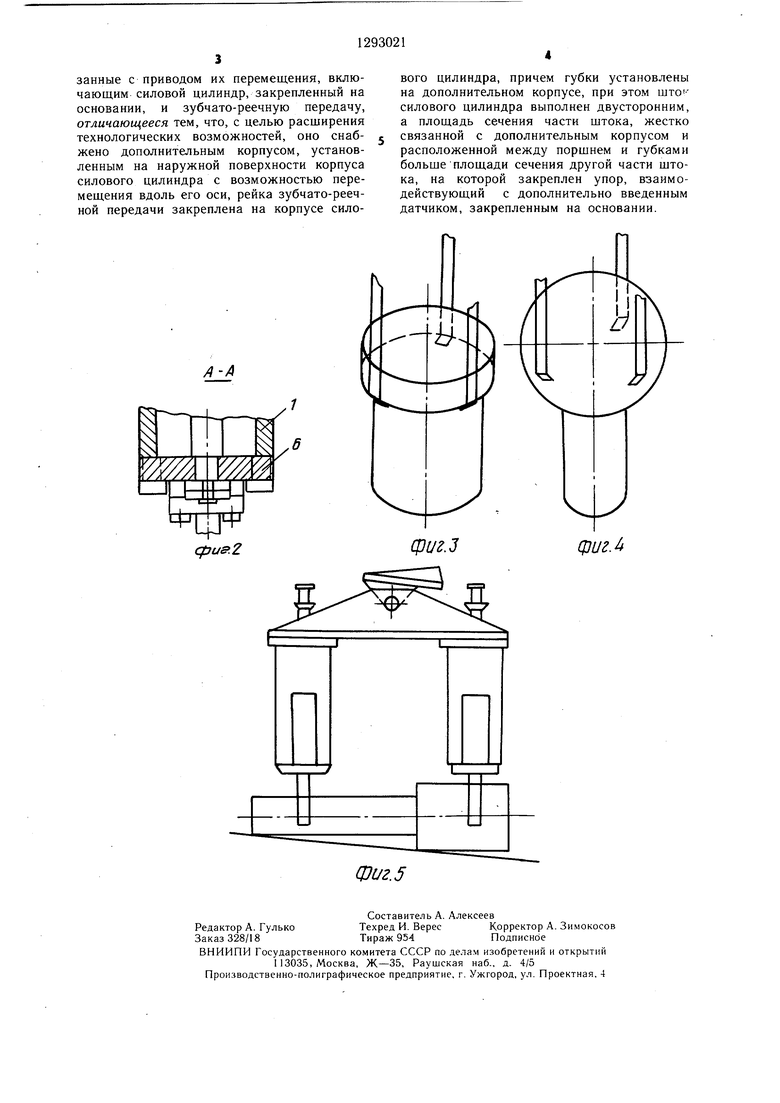
На фиг. 1 изображено захватное устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3-5 - примеры захвата деталей различной конфигурации.
Захватное устройство содержит корпус 1, смонтированный с возможностью осевого перемещения по наружной поверхности силового цилиндра 2, жестко закрепленного на основании 3, закрепленном на руке манипулятора. Шток 4 цилиндра 2 выполнен двухсторонним по отношению к поршню 5, причем нижний конец щтока 4 жестко закреплен через проставку 6 на корпусе 1, а на его верхнем конце установлен с возможностью ограниченного перемещения по штоку 4 упор 7. При этом диаметр нижней части штока 4 превышает диаметр его верхней части. Верхняя и нижняя полости цилиндра 2 связаны с гидрораспределителем 8, управляемым электромагнитами 9 и 10, причем нижняя полость цилиндра 2 соединена через управляемый электромагнитом 11 запорный клапан 12.
На наружной поверхности корпуса силового цилиндра 2 закреплены рейки 13 и 14, соединенные посредством блока шестерен 15 и 16 (нечетного количества) с ползунами 17 и 18, установленными в корпусе 1 с возможностью возвратно-поступательного перемещения. На нижних поверхностях ползунов 17 и 18 смонтированы зажимные губки 19 и 20.
Верхние поверхности ползунов 17 и 18 представляют собой зубчатые рейки, входящие в зацепление с шестернями 15 и 16. Количество реек, шестерен и ползунов с губками определяется в зависимости от количества точек контакта поверхности детали с губками, необходимых для надежного захвата детали.
На верхней крышке цилиндра 2 установлен кронштейн 21 с датчиком 22, причем между датчиком 22 и упором 7 в исходном положении существует зазор.
Захватное устройство работает в полуавтоматическом режиме следующим образом.
В исходном положении поршень 5 и связанный с ним через проставку 6 корпус 1 находятся в крайнем нижнем положении. Золотник гидрораспределителя 8 находится в крайнем нижнем положении, давление при этом подведено в обе полости цилиндра 2. Электромагниты 9, 10 и 11 обесточены. Упор 7 отведен от датчика 22.
0
При опускании основания 3 с рукой манипулятора губки 19 и 20 опускаются и упираются в деталь. Корпус 1 и шток 4 при этом останавливаются, а силовой ци- линдр 2 продолжает опускаться, приводя в движение шестерни 15 и 16. В результате этого ползуны 17 и 18 с губками 19 и 20 перемещаются в стороны, преодолевая усилие, определяемое по формуле F Р (SjjB - Sju,)- ,
где Р -давление в системе;
- активная площадь порщня верхняя;
SftH - активная площадь порщня нижняя
Knvjj- коэффициент трения между губ- 5ками и деталью.
Концы губок 19 и 20 перемещаются по контуру детали до тех пор, пока не разойдутся на ширину, равную диаметру детали. При дальнейшем опускании захватного устройства губки 19 и 20 опускаются ниже оси детали. Корпус 1 под действием усилия на поршне 5 перемещается вниз по наружной поверхности цилиндра 2 на величину, соответствующую высоте выступов на концах губок 19 и 20. Упор 7 при этом отводится 5 от датчика 22, который дает команду на включение электромагнита 10 распределителя 8.
Нижняя полость силового цилиндра 2 соединяется со сливом, а верхняя остается под давлением. Осуществляется зажим детали, и подается команда на перемещение руки манипулятора с основанием 3.
После доставки детали, на позицию разгрузки основание 3 останавливается, выключается электромагнит 10 и включается , электромагнит 9. Верхняя полость цилиндра 2 соединяется со сливом., а в нижнюю подается давление. В результате этого поршень 5 с корпусом 1 перемешается вверх.
Ползуны 17 и 18 с губками 19 и 20 раздвигаются в стороны, освобождая деталь. 0 Упор 7 при этом поднимается вместе со штоком 4 и входит в контакт с датчиком 22, который включает электромагнит 11 запорного клапана 12.
Дальнейшее раздвижение зажимных эле- j ментов прекращается и подается команда на отвод основания 3. После возвращения основани.я 3 в исходное положение электромагниты 10 и 11 обесточиваются и золотник распределителя 8 занимает среднее положение, соединяя обе полости цилиндра 2 с 0 давлением, и корпус 1 опускается в крайнее нижнее положение, губки 19 и 20 занимают исходное положение. Захватное устройство готово к повторению цикла.
0
55
Формула изобретения
Захватное устройство, содержащее основание, зажимные губки, кинематически связанные с приводом их перемещения, включающим силовой цилиндр, закреплениый на основании, и зубчато-реечную передачу, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено дополнительным корпусом, установленным на наружной поверхности корпуса силового цилиндра с возможностью перемещения вдоль его оси, рейка зубчато-реечной передачи закреплена на корпусе силового цилиндра, причем губки установлены на дополнительном корпусе, при этом што - силового цилиндра выполнен двусторонним, а площадь сечения части штока, жестко связанной с дополнительным корпусом и расположенной между поршнем и губками больще площади сечения другой части штока, на которой закреплен упор, взаимодействующий с дополнительно введенным датчиком, закрепленным на основании.
/l-/i
cfjus.2
фиг.З
цзигЛ
Составитель А, Алексеев
Редактор А. ГулькеТехред И. ВересКорректор А. Знмокосов
Заказ 328/18Тираж 954Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг. 5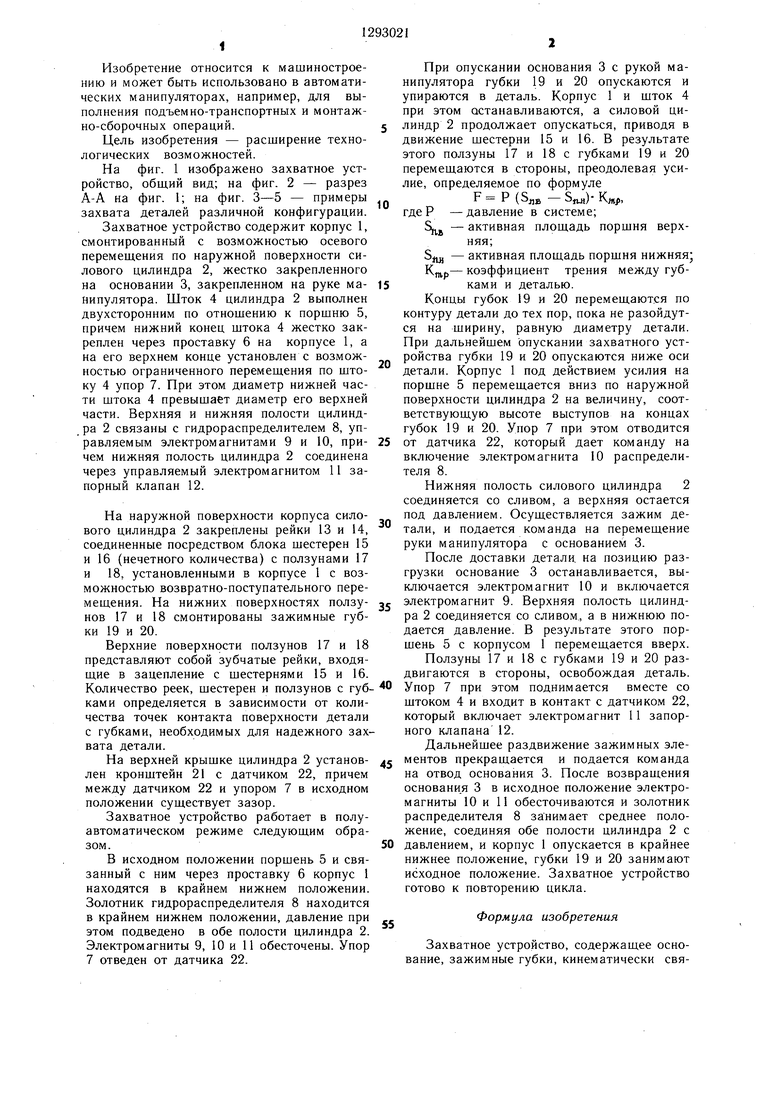
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1987 |
|
SU1414636A1 |
| Манипулирующее устройство | 1981 |
|
SU967799A2 |
| Автооператор | 1989 |
|
SU1726193A1 |
| Схват | 1989 |
|
SU1701516A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Грузозахватное устройство | 1987 |
|
SU1418257A1 |
| Захватное устройство | 1986 |
|
SU1400876A1 |
| Захватное устройство | 1986 |
|
SU1351777A1 |
| Схват | 1987 |
|
SU1440707A2 |
| Захватное устройство | 1988 |
|
SU1563974A1 |
Изобретение относится к машиностроению и может быть использовано в автоматических манипуляторах. Целью изобретения является расширение технологических возможностей. В исходном положении поршень 5 и корпус 1 находятся в крайнем нижнем положении. Давление подведено в обе полости силового цилиндра 2. При опускании основания 3 губки 19 и 20 опускаются и упираются в деталь. Корпус 1 и шток 4 при этом останавливаются, а силовой цилиндр 2 продолжает опускаться, приводя в движение посредством шестерен 15 и 16 ползуны 17 и 18 с губками 19 и 20, которые раздвигаются. При дальнейшем перемеше- нии захватного устройства губки 19 и 20 опускаются ниже оси детали. Корпус 1 под действием усилия на поршень 5 перемеш,а- ется вниз по наружной поверхности силового цилиндра 2, упор 7 отводится от датчика 22, который дает команду на гидрораспределитель для зажима детали. 5 ил. 7гг 2i 2 УХ ;/ (Л to со со о to
| Схват манипулятора | 1981 |
|
SU994253A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
