Изобретение относится к нестандартной технологической оснастке промышленных роботов, а точнее к рабочим органам их манипуляторов, и может быть с наибольшим эффектом использовано при создании роботизированных технологических комплексов, предназначенных для обработки большой группы деталей, существенно отличающихся габаритными размерами, например валов, втулок, гильз, фланцев, переходников и др.
Целью изобретения является расширение технологических возможностей путем обеспечения возможности захвата деталей разных размеров.
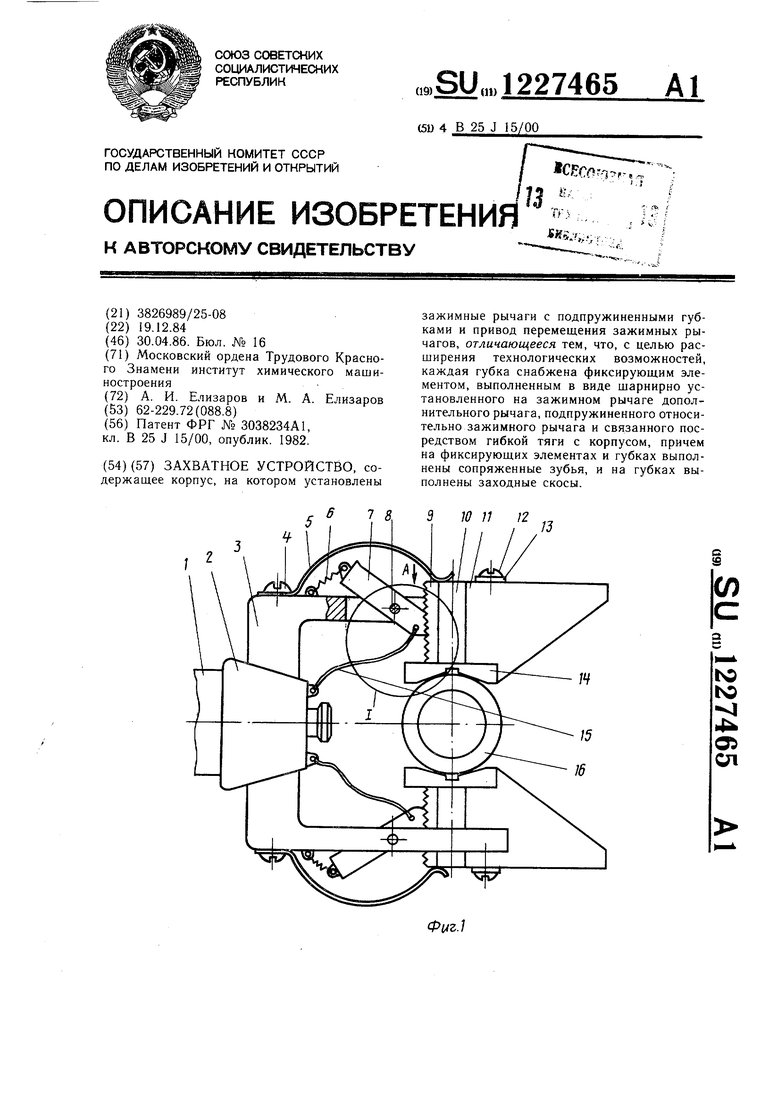
На фиг. 1 показано захватное устройство, общий вид; на фиг. 2 - узел 1 на фиг. 1; на фиг. 3 - вид А на фиг. 1.
Рука манипулятора 1 несет на себе привод 2, управляющий перемещениями зажимных элементов рычагов 3. К каждому рычагу 3 винтом 4 прикреплена пластинчатая пружина 5. Пружина 6 растяжения постоянно поджимает зубчатую часть фиксирующего элемента 7, установленного на оси 8, к зубчатой рейке 9, выполненной на внутренней стороне губки 10. Губка 10 помещена в пазу рычага 3 с возможностью радиального (в направлении к центру захватного устройства) перемещения. Другая сторона губки оформлена в виде копира 11. На копире 11 винтом 12 закреплен ограничитель 13, удерживающий губку 10 в исходном положении, которое он занимает под действием пружины 5. С противоположной от пружины 5 стороны на губке 10 выполнена рабочая часть 14, от внещнего края которой отходит наклонная поверхность заходных скосов копиров 11, выходящая за пределы внутренней полости рычага 5. С другого края губка 10 имеет прорезь для размещения зубчатой части фиксирующего элемента 7 при максимальном расходе рабочих губок 10. Зубчатая часть фиксирующего элемента 7 связана с неподвижным корпусом привода 2 гибким нерастяжимым тросом 15. Зажимная деталь 16 помещается между рабочими губками 10. Если длина губки 10 превыщает половину расстояния между внещними плоскостями рычагов 3, то наличие ограничителей 13 необязательно. В этом случае исходное положение губок 10 определяется рабочими частями 14 губок, которые сомкнуты до упора одна в другую.
Захватное устройство работает следующим образом.
В исходном положении привод 2 разводит рычаги 3 в крайнее положение. При этом нерастяжимые гибкие тросы 15 натягиваются и выводят зубья фиксирующего элемента 7 из зацепления с рейками 9 (см.
5
фиг. 2). Губка 10 под действием пружин 5 сдвигается до упора ограничителей 13 в копиры 11, рабочие поверхности 14 губок сходятся На расстояние, определяемое условиями зажима самой маленькой детали данной партии. Это расстояние определяется диаметром наименьшей детали и величиной холостого хода рычагов 3, пока зубчатые части фиксируемых элементов 7 войдут в зацепление с рейками 9 и заклинят губки 10 в
О пазах рычагов 3.
Для захвата очередной детали универсальное ЗУ за счет осевого выдвижения манипулятора 1 надвигается на деталь за- ходными скосами копира 11. Поскольку зубчатые части фиксирующих элементов 7 выве- дены из зацепления с рейками 9, губки 10 под давлением заготовки на заходные скосы копира 11, преодолевая усилия пружин 5, перемещаются в пазах рычагов 3, и рабочие поверхности губок 10 раздвигаются на расQ стояние, достаточное для охвата очередной детали 16. Таким образом может быть охвачена деталь любого типоразмера от самой малой до самой большой, помещающейся между рабочими губками 10 при их предельном разведении до упора в рычаги 3 (с учетом холостого хода этих рычагов). При этом расстояние между рабочими губками устанавливается автоматически без дополнительных затрат рабочего времени.
После надвигания захватного устройства на деталь управляющее устройство подает команду на привод 2 и рычаги 3 начинают сближаться. При этом натяжение гибких тросов 15 ослабевает, зубчатые части фиксирующих элементов 7 поворачиваются в сторону реек 9, их зубья входят в зацепление с зубьями реек 9 и губки 10 заклиниваются в пазах рычагов 3. Давлений детали 16 на губки 10 облегчает зацепление зубьев фиксирующего элемента 7 и рейки 9. Рабочие губки 10 зажимают деталь 16.
При разжиме рычагов 3 фиксирующие
элементы 7 некоторое время удерживают губки 10, которые отходят от детали 16, освобождая ее. Затем тросы 15 натягиваются выводят зубчатые части фиксирующих элементов 7 Из зацепления с рейками 9, и губки 10 возвращаются в исходное положе5 ние.
Предложенное устройство может быть использовано и для зажима деталей за внутренние поверхности. Для этого все оснащение каждого рычага надо повернуть на
Q 180° вокруг оси параллельно оси манипулятора, а для крепления тросов установить на корпусе удлиненные кронштейны. При этом устройство обеспечивает захват деталей разных типоразмеров без дополнительной переналадки.
5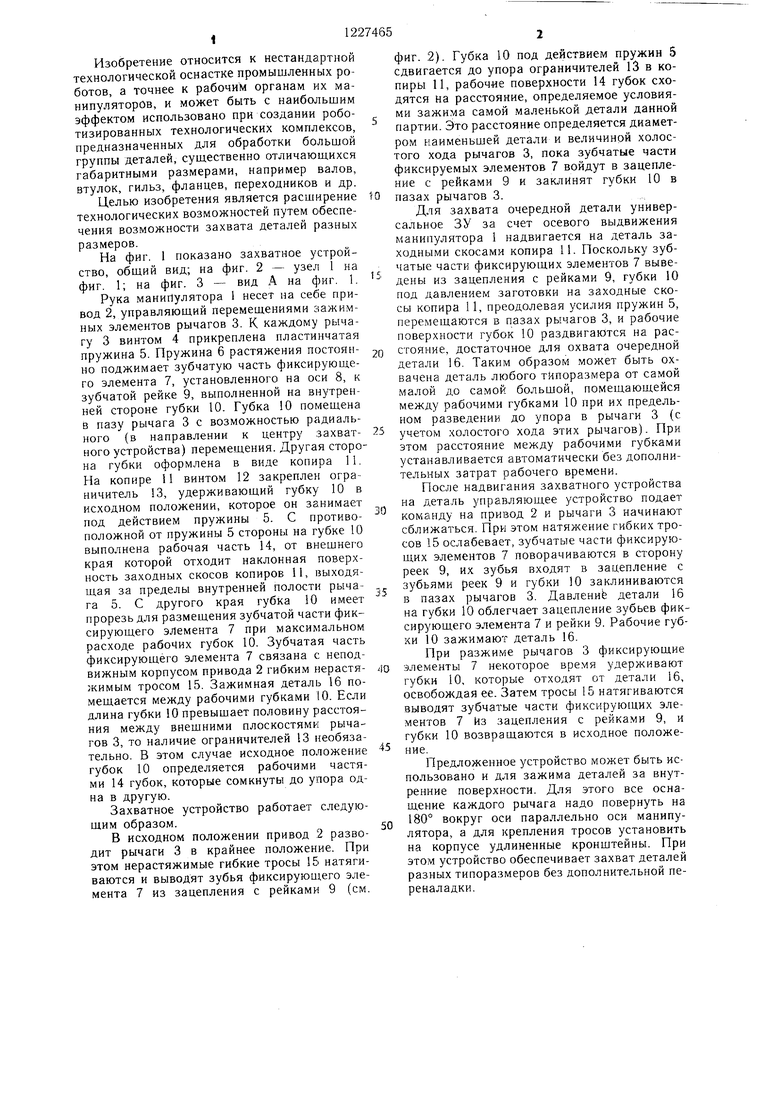
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Захватное устройство | 1989 |
|
SU1708603A1 |
| Захватное устройство робота | 1987 |
|
SU1423373A1 |
| Захватное устройство | 1986 |
|
SU1355483A1 |
| Транспортно-технологический ротор | 1987 |
|
SU1498565A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Автооператор | 1988 |
|
SU1593905A1 |

ВидА
фие.З
| Патент ФРГ № 3038234А1, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
