(Л
оо со
ISO
СО
Изобретение относится к подъемно- транспортной технике, в частности к грузозахватным устройствам.
Целью изобретения является повышение надежности работы путем обеспечения контроля положения груза в зеве корпуса.
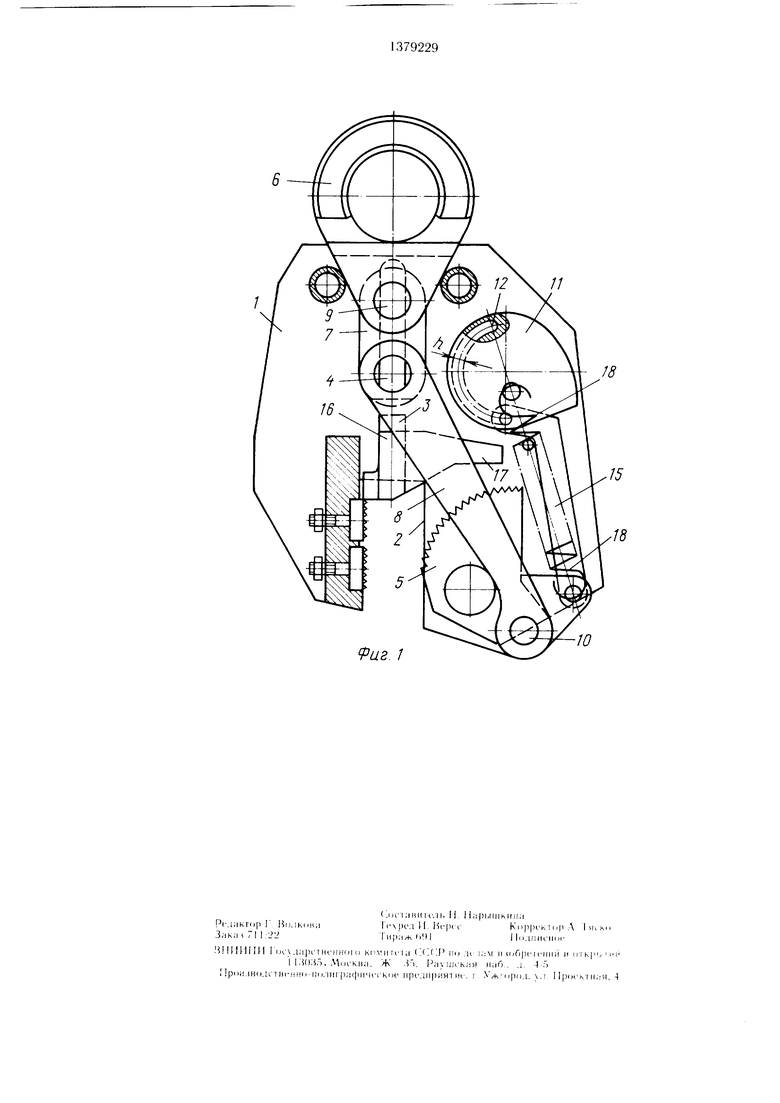
На фиг. 1 показано грузозахватное устройство, обищй вид; на фиг. 2 то же, вид со стороны рукоятки.
Грузозахватное устройство содержит корпус с вертикальным зевом 2 для установ- ки его на груз - металлический лист, и нанравляюа1ей 3, в которой обеспечено перемещение оси П1арнира 4. Грузозахватное устройство состоит из зажимного кулачка 5, парнирно установленно1 о на кор- пусе I, одно плечо которого имеет криволинейный профи.-1Ь, повторяющий . югариф- мическую спираль (у которой угол ос к зажимаемому листу состав. 1яет 25, с зубчатой пасечкой, хвостовик которого связан с подвеской 6 посредством связи 7 и тя- ги 8, соедир|енных П1арнирами 9 и 10. Грузозахватное устройство состоит также из фиксатора положения зажимного кулачка 5, выполненного в виде эксцентрика 1I с цилиндрической торцовой частью с прорезью 12 повторяющей цилиндрическую часть, и торцовой рабочей частью, выполненной по ло- |-ариф.мической спирали, рукояткой 13 и шкалы 14.
Кроме того, устройство содержит дополнительную тягу 15, связанную нижним концом с основной тягой 8, верхний конец которой установлен в прорези 12 планкой 16 с консолью 17, устаиов.аенной в направ;|яющей 3. Эксцентрик 1 1 подпружинен пружиной 18.
Устройство работает следующим образом.
Перед его установкой на листовой материал новоротом рукоятки 13 против часовой стрелки до предела зажимной кулачок 5, вращаясь, убирается в корпус 1 посредством эксцентрика II, доиолнительной тяги 15 и пружины 18. В таком состоя- НИИ корпус 1 устанавливается на листовой материал. Поворотом рукоятки 13 по часовой стрелке пружина 18 поджимает зажимной кулачок 5 к поверхности .чиста и создает усилие предварительного зажатия. В момент создания пружиной 18 максимального усилия предварительного зажатия логарифмическая спираль эксцентрика 11 набегает на консоль 17 планки 16 и под воздействием усилия, прикладываемого к рукоятке 13, передает на кро.мку листа усилие распора, выталкивающее лист из зева 2 корпуса 1.
При этом проверяется достаточно ли усилие пружины 18 для создания предварительного зажатия и состояние зубьев зажимного кулачка 5, что контролируется по шкале 14 на корпусе 1 грузозахватного устройства, при этом происходит запирание листа в зеве 2 корпуса 1. При подъеме листа усилие грузоподъемного ме- хапизма, прикладываемое к подвеске 6, прижимает зажимной кулачок 5 посредством связи 7 и тяги 8 к листовому материалу, захватывая его. 1ри этом рукоятка 13 по шкале 14 постоянно указывает на положение кромки ;|иста в устройстве посредством планки 16, эксцентрика 11 и пружины 18.
5
. 0
0 , 0
0
5
Формула изобретения
Грузозахватное устройство, содержащее корпус с вертикальным зевом в нижней части, связанный посредством подвижного в вертикальной плоскости вдоль направляющей П1арнира с подвеской для крюка грузоподъемного механизма, щарнирно закрепленный на одной из вертикальных частей корпуса зажимной кулачок, щарнирно зак- ренленную на хвостовике последнего нижним концом тягу, верхний конец которой закреплен на шарнире связи корпуса с подвеской, установленной на оси над зажимным кулачком, и подпружиненный относительно нижнего конца тяги, фиксатор положения зажимного кулачка, отличающееся тем, что, с целью повышения надежности работы путем обеспечения контроля положения груза в зеве корпуса, оно снабжено шарнирно связанной с нижним концом основной тяги дополнительной тягой, установленной в указанной направляющей, выполненной в корпусе, плапкой с консолью д.чя взаи.модействия ее нижней части с консолью для взаимодействия ее нижней части с грузом, жестко закрепленной на одном конце фиксатора положения за- жимно1 о кулачка рукояткой и жестко закрепленной на корпусе со стороны рукоятки щка- лой, при этом фиксатор положения зажимного кулачка жестко закреплен на другом конце оси и выполнен в виде эксцентрика с цилиндрической торцовой частью с прорезью, повторяющей цилиндрическую часть, для расположения в ней свободного конца дополнительной тяги и торцовой рабочей частью, выполненной по логарифмической спирали для взаимодействия с верхней частью консоли.
//
Ю
9аг
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1991 |
|
SU1781158A1 |
| Саморасцепляющееся грузозахватное устройство | 1981 |
|
SU992386A1 |
| Рычажно-эксцентриковый захват | 1986 |
|
SU1440850A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Одноканатный крановый захват для грузов | 1945 |
|
SU68906A1 |
| Автоматическая каретка подвесной канатной установки | 1973 |
|
SU495223A1 |
| Грузозахватное устройство | 1988 |
|
SU1548151A1 |
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |
| Автоматический зажим к волочильным станкам | 1931 |
|
SU33515A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1119969A1 |