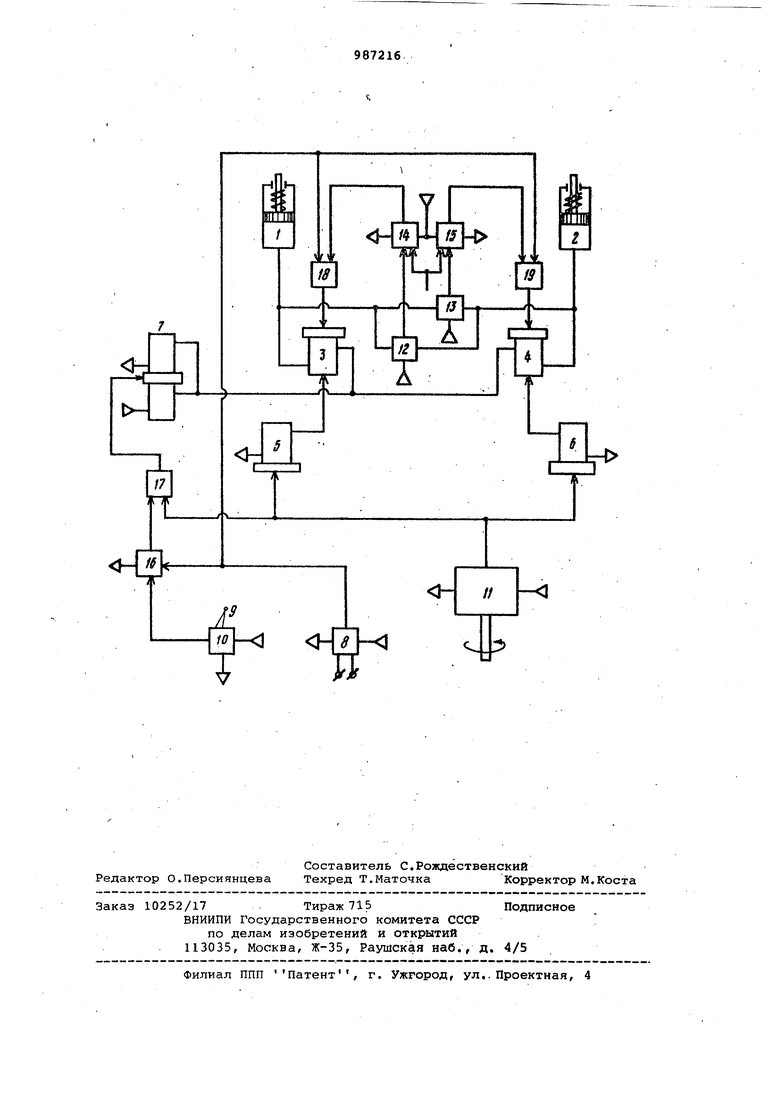
чертеже не изображены), цепь защиты, включающую электропневмоклапан и электрическую цепь (на чертеже не изображена), тормозную рукоятку 9 с пневмопреобразойателем 10, эадаюЩее устройство 11, кинематически связанное с главным валом подъем ной машины (на чертеже не изображены) , реле 12 и 13, триггеры 14 и 15 с раздельными входами, логический элемент ДА 16 и логические элементы ИЛИ 17, 18 и 19. тормозные цилинд ры 1 и 2 через клапаны 3 и 4 соедин ны с выходом регулятора 7 давления, подключенного к источнику сжатого воздуха (на чертеже не изображен), и с клапанами 5 и б, выходы которых соединены с атмосферой. Выход элект пневмоклапана 8 соединен с управляю щим входом элемента ДА 16 и через элементы ИЛИ 18 и 19 - с камерами управления клапанов 3 и 4, к другим входам .элементов ИЛИ 18 и 19 через триггеры 14 и 15 подсоединены выход реле 12 и 13 сравнения, входы которых соединены с тормозными цилиндрами 1 и 2, Выход пневмопреобразова теля 10 тормозной рукоятки 9 через элементы ДА 16 и ИЛИ 17 соединен с камерой управления регулятора 7 дав ления, выход задающего устройства 1 соединен с камерам управления регулирующих клапанов 5 и 6 и с другим входом элемента ИЛИ 17. Рукоятк 9 имеет положения заторможено и расторможено. Пневматическая, система управлени тормозом шахтной подъемной машины работает следующим образом. В исходном состоянии давления в системе нет, подъемная машина затор можена, клапаны 3 и 4 закрыты, регулирующие клапаны 5 и б открыты, тормозные цилиндры 1 и 2 соединены через клапаны 3-6 с атмосферой, тор мозная рукоятка 9 находится в положении заторможено, регулятор 7 давления закрыт. При подаче от источника питания сжатого воздуха на вход регулятора давления и замыкании цёпи защиты подъемной установки (зарядке машины включается электропневмоклапан 8, пневматический сигнал с выхода кото рого открывает элемент ДА 16, соеди няя выход пневмопреобразователя 10 тормозной рукоятки 9 с камерой управления регулятора 7 давления, а также через элементы ИЛИ 18 и 19 открывает клапаны 3 и 4, отсоединяя тормозные цилиндры 1 и 2 от регулирующих клапанов 5 и б и соединяя их .с выходом регулятора 7 давления. Дл движения машины тормозная рукоятка переводится в положение расторможено, пневматический сигнал с выхода пневмопреобразователя 10 проходит через открытый элемент ДА 16 и элемент ИЛИ 17 в камеру управления регулятора давления и открывает его,, сжатый воздух из регулятора 7 через клапаны 3 и 4 проходит в цилиндры 1 и 2 и растормаживает машину. При начале движения машины задающее устройство 11 в зависимости от направления движения и профиля пути формирует аналоговый пневматический сигнал, который проходит в камеры управления регулирующих клапанов 5 и 6 и закрывает их с усилием, пропорциональным давлению первой ступени предохранительного торможения в тормозных цилиндрах 1 и 2. По окончании движения маашны тормозная рукоятка 9 возвращается в положение заторможено, при этом если она была переведена меипинистом резко и сигнал на ее выходе стал равен О, что соответствует резкому приложению полного тормозного момента при движении машины и вызовет недопустимо большое замедление, создающее аварийную ситуацию, тЬ за счет сигнала от задающего устройства 11, прошедшего в камеру управления регуля,тора 7 давления, через элемент ИЛИ 17 вместо сигнала управления от тормозной рукоятки 9, торможение будет осуществляться с допустимым замедлением. При остановке машины сигнал с выхода задающего устройства 11 принимает значение С, камеры управления регулирующих клапанов 5 и б и регулятора 7 давления соединяются с атмосферой, При необходимости в предохранительном торможении при движении машины разрывается электрическая цепь защиты, электропневмоклапан 8 выключается, в результате чего элемент ДА 16 закрывается, отсоединяя тормозную рукоятку 9 от регулятора 7 давления, клапаны 3 и 4 закрываются, отсоединяя тормозные цилиндры 1 и 2 от регулятора 7 давления и соединяя их с клапанами 5 и 6, Давление воздуха в цилиндрах 1 и 2 резко падает до величины предохранительного торможения, подъемная машина затормаживается с допустимым замедлением. После остановки сигнал с выхода задающего устройства 11 принимает значение клапаны 5 и б открываются, соединяя цилиндры 1 и 2 с атмосферой, тормозной момент при этом максимальный . В случае отказа одного из регулирующих клапанов, например клапана 5,что повлечет за собой резкое падение давления воздуха в цилиндре 1 и увеличение его тормозного момента до максимума, реле 12 сравнения по достижении разности давлений в цилиндрах 1 и 2 определенной заданной величины выдает дискретный сигнал, который поступает на вход триггера 14, запоминается им и через элемент ИЛИ 18 открывает клапан 3, Цилиндр 1 соединяется с регулятором 7 давления, отрабатывающим на выходе ту же установку, что и регулирующие клапаны 5 и б. Причем, если давление в цилиндре 1 упало ниже заданного, регулятор 7 давления поднимает его до необходимой величины. Таким образом осуществляется дублирование регулятором 7 давления неисправного клапана 5.
Сброс памяти триггеров 14 .и 15 с раздельнь1ми входами осуществляется сигналом, подающимся на нулевые входы триггеров по окончании предохранительного торможения.
Таким образом, в предлагаемой пневматической системе режим предо.хранительного торможения имеет двухступенчатый характер, при этом торможение осуществляется с постоянным замедлением; величина тормозного момента первой ступени регулируется в зависимости от направления движения и профиля пути и обеспечивает заданное допустимое замедление, при котором исключается обрыв каната вследствие динамического удара; исключается возможность аварии из-за неправильных действий - резкого рабочего торможения - машиниста подъемной установки, так как в любом случае тормозной момент не превысит допустимый момент предохранительного торможения; осуществляется контроль исправности средств предохранительного торможения - регулирующих клапанов и активное дублирование в случае отказа одного из них регулятором давления, отрабатывающим тот же режим торможения.
Использование предлагаемого изобретения позволяет повысить безопасность и надежность пневмоприводов
управления тормозами шахтныхподъемных машин.
Формула изобретения
Пневматическая система управления тормозом шахтной подъемной машины, содержащая тормозные цилиндры, регулятор давления с камерой управле0ния, регулирующие клапаны, входы управления которых соединены с выходом задающего устройства, кинемати чески связанного с главным валом машины, трехлинейные клапаны, входы
5 которых соединены с выходом регулятора давления, а выходы - с тормозными цилиндрами и через регулирующие клапаны - с атмосферой, тормозную рукоятку с пневмопреобразовате.лем и цепь защиты, отличаю0щаяся тем, что, с целью повышения безопасности и надежности,она снабжена двумя реле сравнения,двумя триггерами с раздельными входги-ти,логическим элементом ДА и тремя логиче5скими элементами ИЛИ,причем выход пневмопреобразователя тормозной рукоятки соединен с входом элемента ДА,выход которого соединен с одним из входов первого элемента ИЛИ, другой
0 вход которого соединен с выходом задающего устройства, а выход соединен с.камерой управления регулятора давления, управляющий вход элемента ДА связан с цепью защиты, соеди5ненной с одним из входов второго и третьего элементов ИЛИ, к другим входам последних через триггеры подключены выходы соответствующих реле сравнения, причем входы каждого ре0ле сравнения соединены с двумя тормозными цилиндрами.
Источники информации, принятые во внимание при экспертизе 45 1. Авторское свидетельство СССР № 772971, кл. В 66 D 5/28, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления предохранительным тормозом подъемной машины | 1982 |
|
SU1115988A2 |
| Устройство для управления предохранительным тормозом подъемной машины | 1981 |
|
SU1094828A1 |
| Устройство для управления предохранительным тормозом подъемной машины | 1989 |
|
SU1636316A1 |
| Устройство для управления тормозом подъемной машины | 1987 |
|
SU1423492A1 |
| Устройство управления предохранительным тормозом подъемной машины | 1984 |
|
SU1549891A2 |
| Устройство для управления предохранительным тормозом подъемной машины | 1982 |
|
SU1119956A2 |
| Устройство управления предохранительным тормозом подъемной машины | 1982 |
|
SU1115987A2 |
| Устройство для управления рабочим торможением подъемной машины | 1974 |
|
SU644702A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1757981A1 |
| Устройство для управления тормозом подъемной машины | 1988 |
|
SU1523511A1 |