Изобретение относится к робото- texHHKe и может быть использовано в. Промышленных роботах при автоматиза- Ции технологических процессов.
Целью изобретения является увеличение грузоподъемности и расширение технологических возможностей за счет определения конфигурации захватываемой Детали,
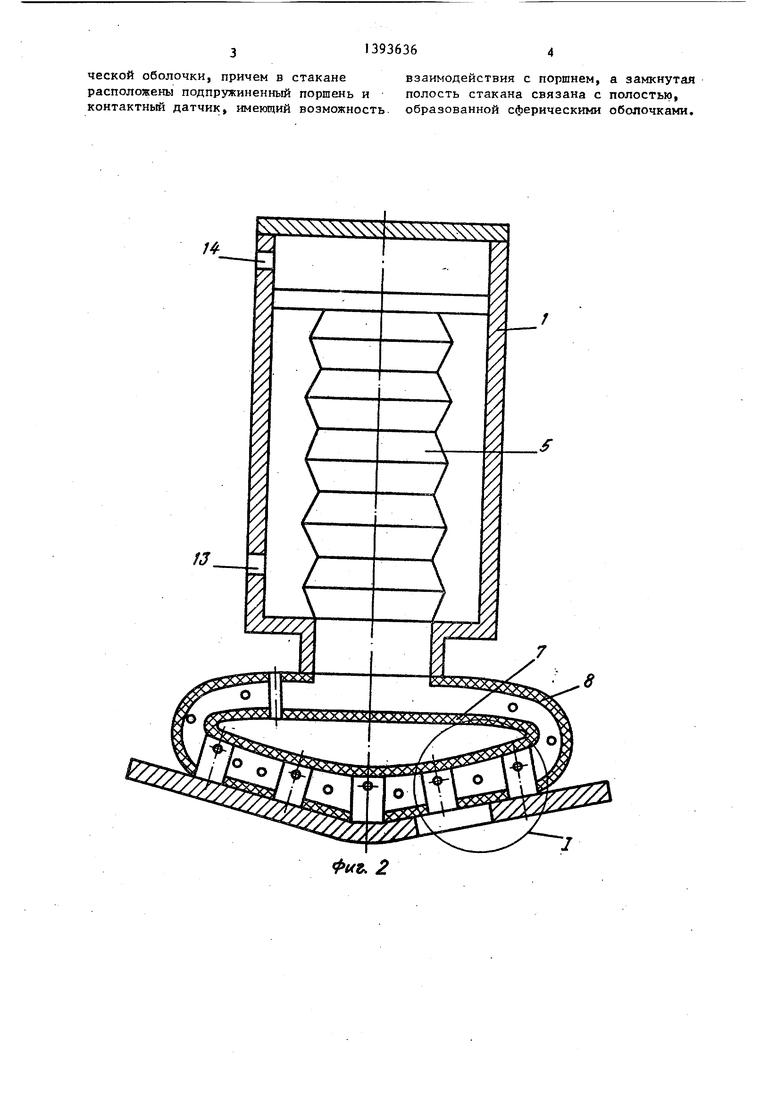
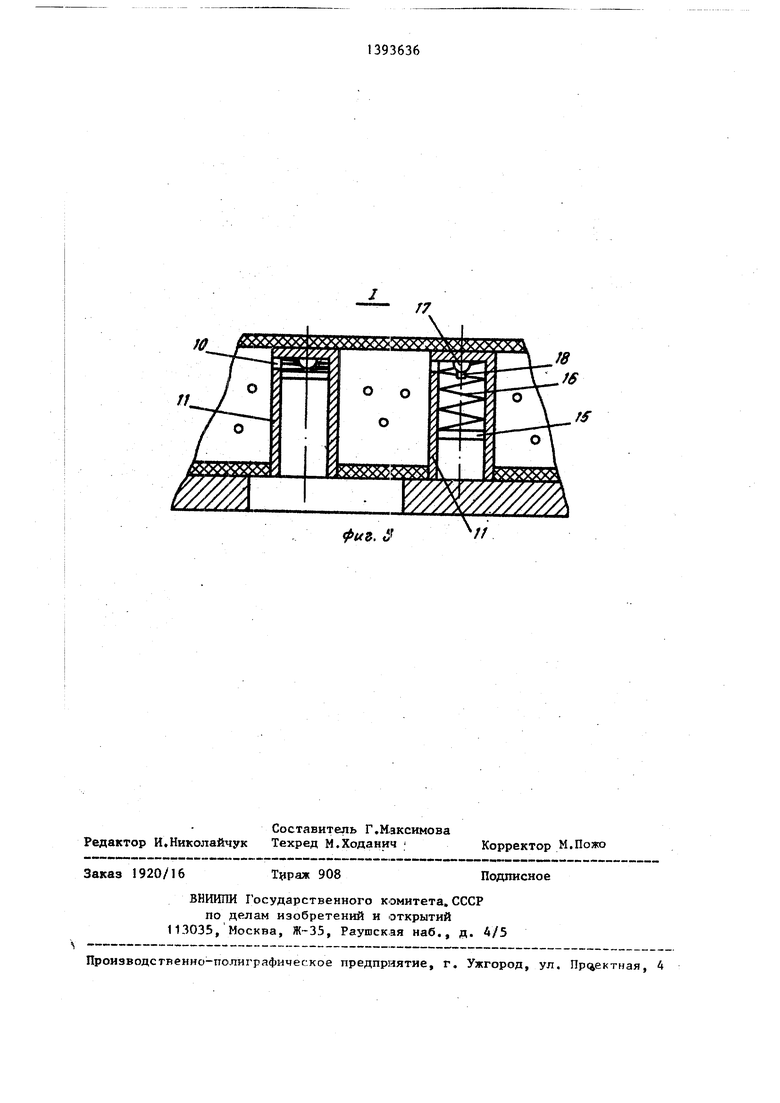
На фиг. 1 схематически показан схват робота, разрез; на фиг, 2 - то ке, в рабочем положении, на фиг,3 - узел I на фиг, 2.
Схват содержит корпус 1 с крыта- кой 2, В цилиндрической полости 3 корпуса 1 расположен поршень 4, с Йижней поверхностью которого соединен сильфон 5, Полость последнего Связана посредством патрубка 6 с по- jnocTbK), образованной сферическими УПРУГИМИ оболочками 7 и 8 и заполнен йой сыпучим гранулированным вещест- |вом 9j например пластмассовыми грану ами, а также соединена посредством атрубков 10 с полостью присосрк, вы олненных- в виде цилиндрических стак ов 1I, радиально расположенных меж- ду оболочками 7 и 8.-Полость внутри ;оболочки 7 связана с атмосферой по .Средством вставки - отверстия 12 в верхней полусфере оболочек 7 и 8 В |нижней части корпуса I имеется отвер ;стие 13, а в верхней - отверстие 14, IB полостях стаканов 11 расположены Ьоршни 15, подпружиненные с помощью Ьружин 16 относительно стаканов 11, рупорные элементы 17, на которых установлены контактные датчики 18, соединенные с блоком з равления робота (не показан).
Схват работает следующим образом.
При опускании охвата на предмет упругие сферич еские оболочки 7 и 8 деформируются в соотЕ;етствии с формой поверхности захватьшаемого пред- мета и давление в полости внутри оболочки 7 уравнивается с атмосферным псредством отверстия 12, В это время поршень. 4 нахЬдится в нижнем положении, при котором сильфон 5 сжат. При подаче сжатого воздуха в полость 3 корпуса 1 через отверстие 13 поршень 4 идет вверх и растягивает сильфон 5, создавая разреясешге в полости, образованной оболочками: 7 и 8, а также в полостях стаканов 1I, При этом поршни 15 перемешаются к центру сферических оболочекс, создавая разреже
O
0
jj 5 5
45 5055
0
ние в полостях стаканов 11, контактирующих с деталью, за счет чего деталь оказывается захваченной, В тех стаканах 11,которые не контактируют с деталью, сила сжатия пружин 16 поршнями 15 больше, эти поршни под воздействием атмосферного давления снаружи перемещаются до упора в элементы 17. Под действием созданного разрежения в полости, образованной оболочками 7 и 8, гранулированное вещество 9 как бы затвердевает, увеличивая жесткость оболочек, В тех стаканах 11, поршни 15 которых переместились до соприкосновения с упорными элементами 17, замыкаются контакты датчиков 18, сигналы с которых поступают в блок управления робота, анализируя которые последний определяет конфигурацию захватываемой детали.
При подаче сжатого воздуха в верхнее отверстие 14 поршень 4 идет вниз, сжимая сильфон 5, при зтом давление в полостях стаканов 11 и в полости, образованной оболочками 7 и В, возрастает, поршни 13 перемещаются к детали, и деталь освобождается. Оставшиеся поршни возвращаются в исходное состояние под действием пружин 16, размыкая контакты датчиков 18, Давление внутри оболочки 7 через отверг, стие 12 уравнивается с атмосферным ri оболочки 7 и 8 восстанавливают свою форму.
Формула изобретения
Универсальный скват робота, содержащий цилиндрический.корпус, в полости которого размещены поршень и сильфон, один конец которого закреплен на поршне, а другой - на корпусе, и сферическую упругую оболочку, установленную на корпусе, полость которой связана с полостью сильфона, отличающийся тем что, с целью pa :шиpeния технологических возможностей и увеличения грузоподъемности, он снабжен дополнительной сферической упругой оболочкой, расположенной внутри первой оболочки, и при- сосками, радиально размещенными в полости, образованной сферическими оболочками и заполненной гранулированным веществом, при этом полость дополнительной сферической оболочки связана с атмосферой, присоски выполнены в виде стакановS установленных открытым торцом в сторону основной сфери313936364
ческой оболочки, причем в стакане взаимодействия с поршнем, а замкнутая расположены подпружиненный поршень и полость стакана связана с полостью, контактный датчик, имеющий возможность образованной сферическими оболочками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Схват манипулятора | 1984 |
|
SU1178588A1 |
| Манипулятор | 1982 |
|
SU1007965A1 |
| Вакуумный схват | 1989 |
|
SU1689066A1 |
| Вакуумный схват манипулятора | 1988 |
|
SU1521587A1 |
| Вакуумный схват манипулятора | 1986 |
|
SU1421533A1 |
| Схват манипулятора | 1986 |
|
SU1380938A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| Вакуумный схват | 1989 |
|
SU1763174A1 |
Изобретение относится к области робототехники и может быть использовано в промьшшенных роботах при автоматизации технологических процессов Целью изобретения является расширение технологических возможностей и увеличение грузоподъемности. Для этого внутри (Сферической упругой оболочки 8 установлена дополнительная сферическая упругая оболочка 7, а полость, образованная сферическими .г оболочками, заполнена гранулированным веществом 9. Между сферическими оболочками радиально расположены присоски, выполненные в виде стаканов 11. В стакане 11 размещены подпружиненные поршень и контактный датчик, имеющий возможность взаимодействия с поршнем. При растяжении сильфона 5 в полости, образованной оболочками 7 и 8, а также в полостях стаканов П создается разрежение. При этом поршни перемещаются к центру сферических оболочек, а гранулированное вещество 9 как бы затвердевает, увеличивая жесткость оболочек. В тех стаканах 11, которые не контактируют с деталью, поршни под воздействием атмосферного давления перемещаются до упора в контактные датчики, сигналы с которых поступают в блок управления. Таким образом может производиться определение конфш урации захватываемой детали. 3 ил.(Л
/
Фиъ. 2
8
w
Составитель Г.Максимова Редактор И.Николайчук Техред М.Ходанич Корректор М.Пожо
Заказ 1920/16
Тураж 908
ВНИИПИ Государственного комитета.СССР
по делам изобретений и открытий 113035, Москва, , Раушская наб., д. 4/5
/8
фиъ. Jf
Подписное
| Схват | 1984 |
|
SU1214409A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
