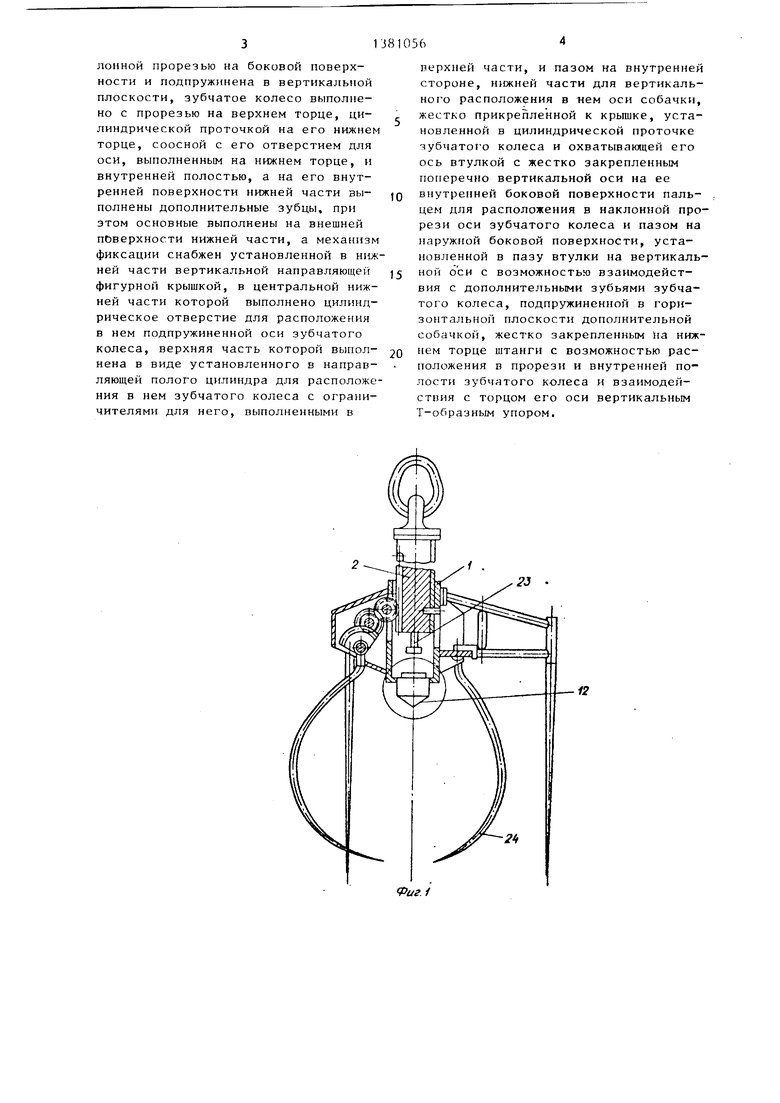
фиг. 2
Изобретение относится к подъемно- транспортной технике, в частности к механизмам фиксации положения рычагов грузозахватных устройства.
Цель изобретения - повьшшние надежности ,
На фиг. 1 показан общий вид механизма фиксации положения рычагов
того колеса 5 собачка А западает в зуб 11 зубчатого колеса 5, препятствуя его повороту.
При подъеме штанги 2 Т-образный упор 23 свободно проходит через прорезь 7 зубчатого колеса 5 и рычаги 24 сходятся. Т-образный упор 23 вьше- ден из внутренней полости 9 зубчато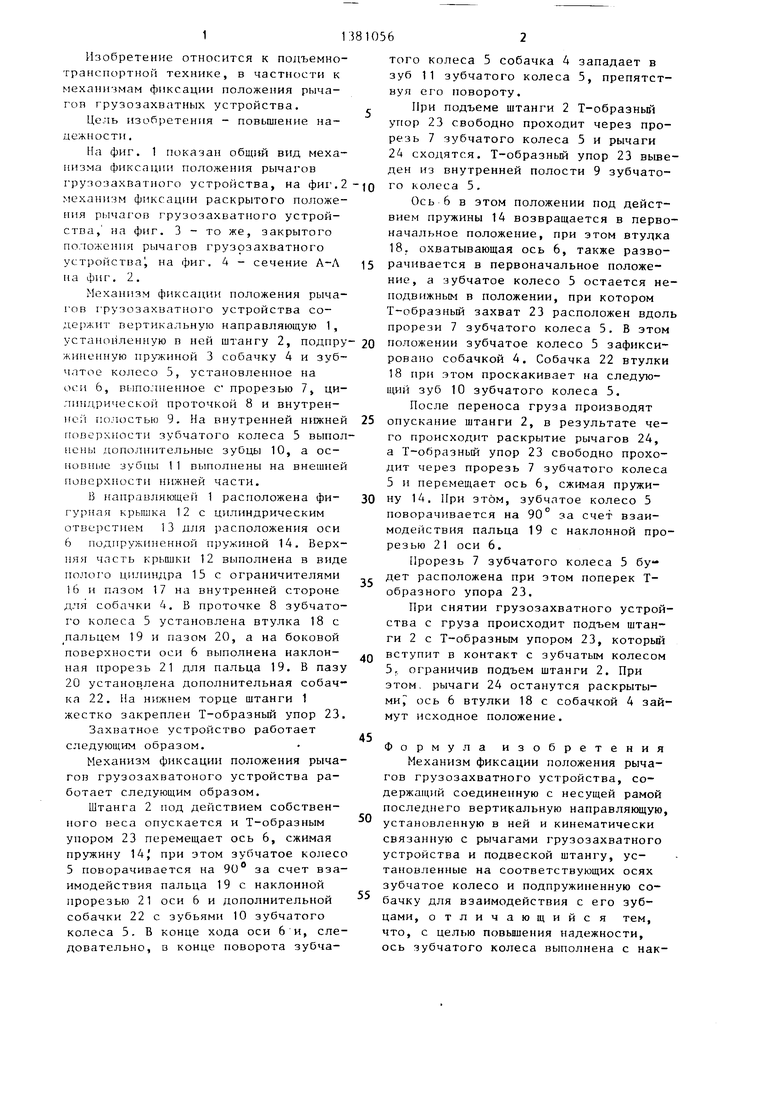
| название | год | авторы | номер документа |
|---|---|---|---|
| Пишущая машина | 1934 |
|
SU43012A1 |
| Грузозахватное устройство | 1986 |
|
SU1399251A1 |
| Телеграфный приемник | 1925 |
|
SU9321A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Тормоз грузовой тележки | 1979 |
|
SU906766A1 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| ПИШУЩАЯ МАШИНА | 1930 |
|
SU24411A1 |
| Индексирующий и транспортирующий механизм | 1988 |
|
SU1614752A3 |
| Захватное устройство для ящиков | 1979 |
|
SU918241A1 |
| Устройство для подвязки растений к шпалерной проволоке | 1979 |
|
SU923450A1 |
Изобретение относится к подъемно-транспортной технике, в частности к механизмам фиксации положения рычагов грузозахватного устро1 ства. Целью изобретения является повышение надежности. Механизм фиксации положения рьг-iaroB грузозахватного устройства содержит ось 6 зубчатого колеса 5, которая обеспечивает поворот втулки 18 и зубчатого колеса 5 на постоянный угол, что повышает надежность. 4 ил. (Л со 00 ел О5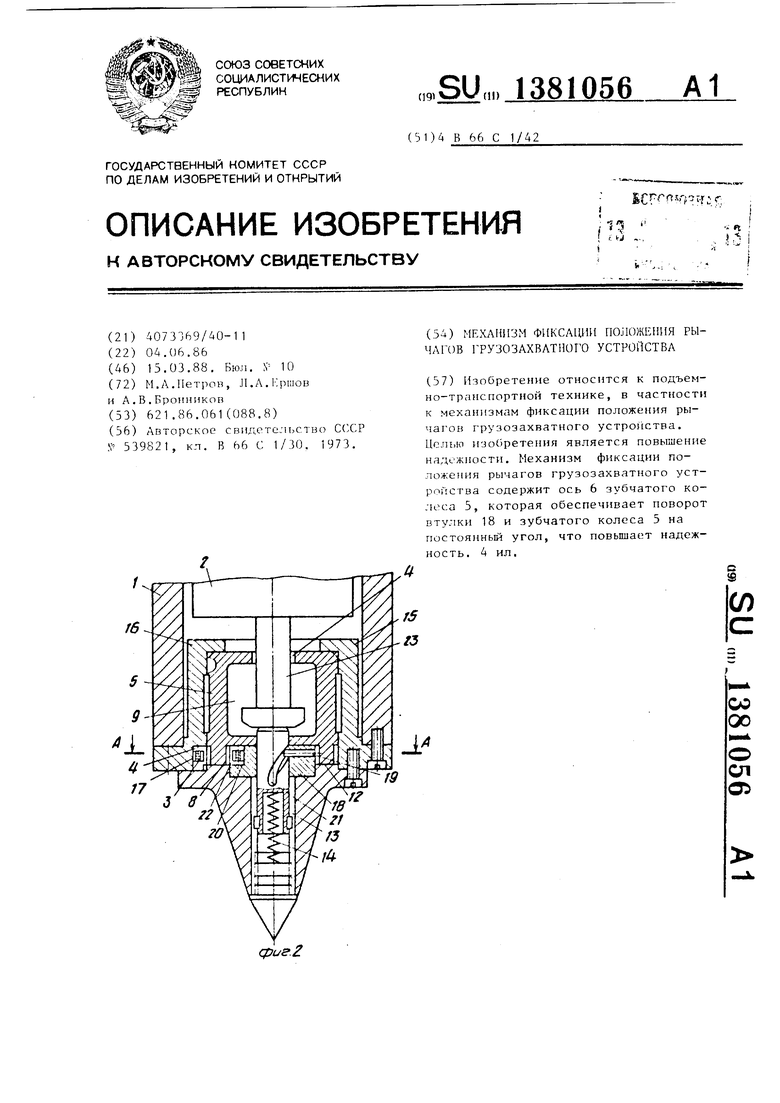
грузозахватного устройства, на фи1 . го колеса 5,
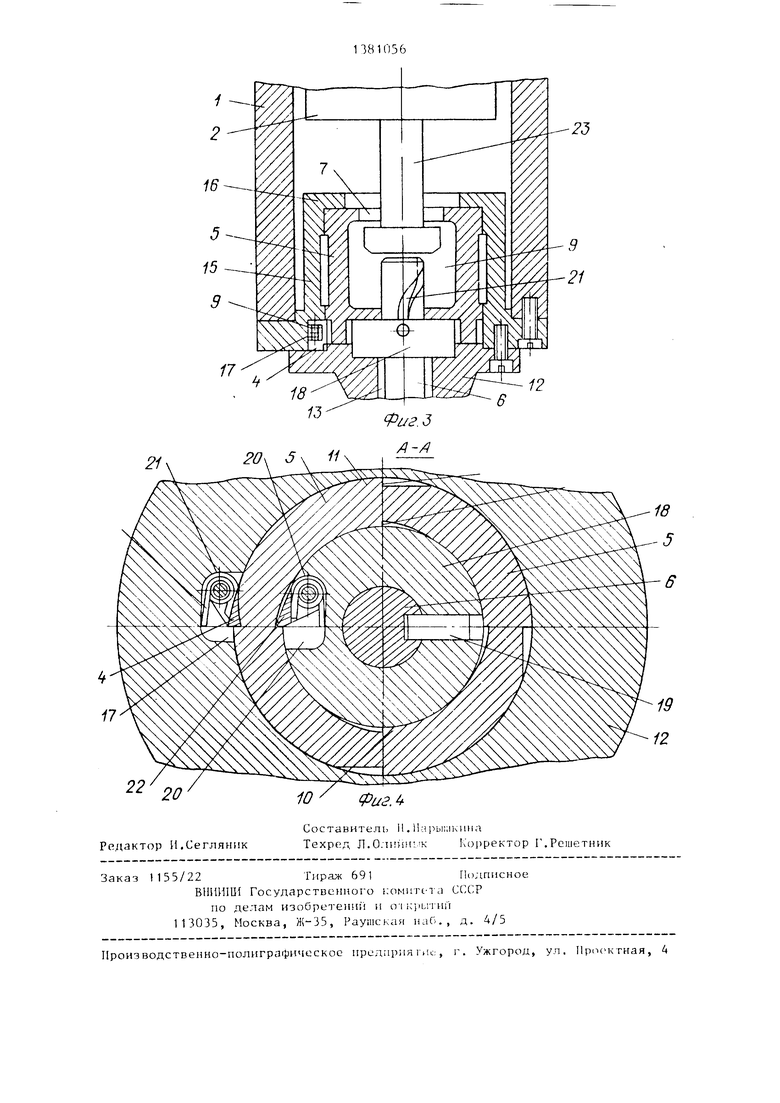
механизм фиксации раскрытого положа- Ось 6 в этом положении под действия рычаг ов грузозахватного устройства, на фиг. 3 - то же, закрытого положения рычагов грузозахватного устройства, на фиг. 4 - сечение А-Л 15 на фиг. 2.
Механизм фиксации положения рычагов г рузозахватного устройства содержит вертикальную направляющую 1, устанонленр ую в ней штангу 2, подиру- 20 положении зубчатое колесо 5 зафикси- жипеиную пр жиной 3 собачку 4 и зуб- ровано собачкой 4. Собачка 22 втулки
вием пружины 14 возвращается в перво начальное положение, при этом втудка 18. охватывающая ось 6, также разворачивается в первоначальное положение, а зубчатое колесо 5 остается не- подвижньм в положении, при котором Т-образный захват 23 расположен вдол прорези 7 зубчатого колеса 5, В этом
чатое колесо 5, установленное на оси 6, выполненное с прорезью 7, ци- линцрическоГ проточкой 8 и внутренне; полостью 9. На внутренней нижней г1(1верхности зубчатого колеса 5 выпол- нс1П)1 дополнительные зубцы 10, а основною зубцы 11 выполнены на внешней гюцерх 1ости нижней части.
В направляющей 1 расположена фигурная крышка 12 с цилиндрическим отверстием 13 для расположения оси 6 подпружиненной пружиной 14. Верхняя часть крышки 12 выполнена в виде полого ци.чиндра 15 с ограничителями 16 и пазом 17 на внутренней стороне для собачки 4. В проточке 8 зубчатого колеса 5 установлена втулка 18 с пальцем 19 и пазом 20, а на боковой поверхности оси 6 выполнена наклонная прорезь 21 для пальца 19. В пазу 20 установлена дополнительная собачка 22. На нижнем торце штанги 1 жестко закреплен Т-образный упор 23.
Захватное устройство работает следующим образом.
Механизм фиксации положения рычагов грузозахватоного устройства работает следующим образом.
Штанга 2 под действием собственного веса опускается и Т-образным упором 23 перемещает ось 6, сжимая пружину 14, при этом зубчатое колесо 5 поворачивается на 90 за счет взаимодействия пальца 19 с наклонной прорезью 21 оси 6 и дополнительной собачки 22 с зубьями 10 зубчатого колеса 5. В конце хода оси 6 и, следовательно, в конце поворота зубча Ось 6 в этом положении под дейстположении зубчатое колесо 5 зафикси- ровано собачкой 4. Собачка 22 втулки
вием пружины 14 возвращается в первоначальное положение, при этом втудка 18. охватывающая ось 6, также разворачивается в первоначальное положение, а зубчатое колесо 5 остается не- подвижньм в положении, при котором Т-образный захват 23 расположен вдоль прорези 7 зубчатого колеса 5, В этом
0
18 при этом проскакивает на следующий зуб 10 зубчатого колеса 5.
После переноса груза производят 5 опускание штанги 2, в результате чего происходит раскрытие рычагов 24, а Т-образньй упор 23 свободно проходит через прорезь 7 зубчатого колеса 5 и перемещает ось 6, сжимая пружину 14. При зтом, зубчатое колесо 5 поворачивается на 90° за счет взаимодействия пальца 19 с наклонной прорезью 21 оси 6.
Прорезь 7 зубчатого колеса 5 будет расположена при этом поперек Т- образного упора 23.
При снятии грузозахватного устройства с груза происходит подъем штанги 2 с Т-обраэным упором 23, который вступит в контакт с зубчатым колесом 5, ограничив подъем штанги 2. При этом, рычаги 24 останутся раскрытыми ось 6 втулки 18 с собачкой 4 займут исходное положение.
5
0
Формула изобретения Механизм фиксации положения рычагов грузозахватного устройства, содержащий соединенную с несущей рамой последнего вертикальную направляющую, установленную в ней и кинематически связанную с рычагами грузозахватного устройства и подвеской штангу, установленные на соответствующих осях зубчатое колесо и подпружиненную собачку для взаимодействия с его зубцами, отличающийся тем, что, с целью повышения надежности, ось зубчатого колеса выполнена с наклонной прорезью на боковой поверхности и подпружинена в вертикальной плоскости, зубчатое колесо выполнено с прорезью на верхнем торце, цилиндрической проточкой на его нижнем торце, соосной с его отверстием для оси, выполненным на нижнем торце, и внутренней полостью, а на его внутренней поверхности нижней части выполнены дополнительные зубцы, при этом основные выполнены на внешней поверхности нижней части, а механизм фиксации снабжен установленной в нижней части вертикальной направляющей фигурной крышкой, в центральной нижней части которой выполнено цилиндрическое отверстие для расположения в нем подпружиненной оси зубчатого колеса, верхняя часть которой выполнена в виде установленного в направляющей полого цилиндра для расположения в нем зубчатого колеса с ограничителями для него, выполненными в
верхней части, и пазом на внутренней стороне, нижней части для вертикального расположения в нем оси собачки,
жестко прикрепленной к , установленной в цилиндрической проточке зубчатог о колеса и охватывающей его ось втулкой с жестко закрепленным поперечно вертикальной оси на ее
внутре1гней боковой поверхности пальцем для расположения в наклонной прорези оси зубчатого колеса и пазом на наружной боковой поверхности, установленной в пазу втулки на вертикальной оси с возможностью взаимодействия с дополнительными зубьями зубчатого колеса, подпружиненной в горизонтальной плоскости дополнительной собачкой, жестко закрепленным tia нижнем торце штанги с возможностью расположения в прорези и внутренней полости зубчатого колеса и взаимодействия с торцом его оси вертикальным Т-образным упором.
22
2:5
%с.4
| Механизм фиксации захватного устройства | 1973 |
|
SU539821A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
