Изобретение относится к текстильному машиностроению и может быть использовано во вс ех видах ткацких станков для передачи ремизным рамкам
программно-управляемого движения.
/
Целью изобретения является по вы- шение надежности ремизоподъемной каретки, быстродействия и расширение технологических возможностей
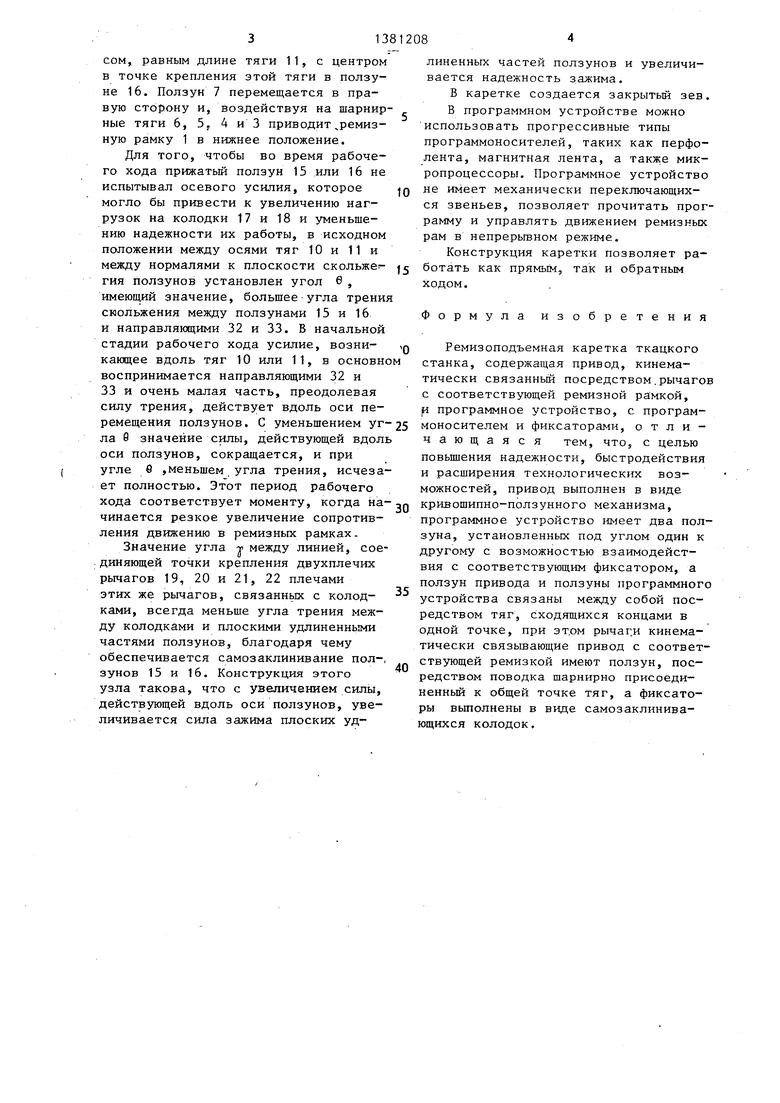
На фиг. 1 изображена принципиальная кинематическая схема каретки; на фиг. 2 - схема оптико-электромагнитного программирующего устройства; на фиг. 3 - ремизная рамка.
Ремизоподъемная каретка содержит ;ремизные рамки 1, направляющие вертикальные стойки 2, шарнирные кинематические связи 3-6, последняя из которых соединена с ползуном 7,получающим программно-управляемое возвратно-поступательное движение. Пово- ;док 8 и тяги 9, 10 и 11 соединены между собой в одной точке 0. Нижний ;конец тяги 9 связан с ползуном 12 :кривошипно-ползунного механизма. :Кривошип 13 получаетдвижение от главного вала станка и через шатун 14 приводит в движение ползун 12. Тя1ги 10 и 11 соединены с ползунами 15 и 16 таким образом, чтобы между их осями и нормально к плоскости движения ползунов образовался угол, б . Плоский удлиненный конец 15 или 16 ползунов 15 и 16 перемещается между зажимными самозаклинивающимися колодками 17 или 18 программного, устройства, которые установлены на плечах двухплечих рычагов 19, 20 и 21, 22, Вторые плечи рычагов 19 и 20 являются якорями электромагнитов 23 и 24, а вторые плечи рычагов 21 и 22 связаны с пружинами 25 и 26 возвра- .та. Программоноситель 27 приводится в движение барабанчиками 28 и проходит между прочитывающими головками 29 программного устройства. Элементы 30-33 являются направляющими для ползунов 7,12,15и16.
Ремизоподъемная каретка работает следующим образом.
После прочитки программы подается команда на электромагниты 23 и 24, связанные между собой таким образом, чтобы при включении одного электро- 1магнита другой отключается, т.е. Исключается одновременное включение электромагнитов, Прочитка новой программы осуществляется в период, когда
0
5
0
5
0
5
0
5
0
5
ползун 12 перемещается от нижнего положения к верхнему, а включение электромагнитов в период, когда ползун 12 движется в обратном направлении. Этим обеспечивается беспрепятственное движение ползунов 15 или 16 в исходное положение.
Если включен электромагнит 23, а 24 отключен, то тогда электромагнит притягивает якори, установленные на вторых плечах двухплечих рычагов 19, заставляя их поворачиваться вокруг осей, и колодки 17, выбирая зазор прижимаются с двух сторон к поверхности удлиненного конца 15 ползуна 15. Это приводит к заклиниванию ползуна 15 и он в дальнейшем до конца цикла играет роль неподвижной опоры для тяги 10.
При движении ползуна 12 вверх точка О крепления тяг будет перемещаться в левую сторону от линии перемещения ползуна 12 по окружности радиусом, равным длине тяги 10, вокруг точки крепления этой тяги в ползуне 15. Ползун 7 перемещается в левую, сторону и, воздействуя на шарнирные тяги 6, 5, 4 и 3 приводит ремизную рамку 1 в верхнее положение. Ползун 16 скользит вверх по направлякнцей 33. Крайнее положение механизма при полном подъеме ползуна 12 приведено на фиг. 1 пунктирными линиями. При обратном движении ползуна 12 точка О возвращается в свое исходное положение О и цикл завершается. Если программа не из менилась, т.е. необходимо поднять рассмотренную ремизную рамку, то снова зажимается ползун 15 и механизм работает по описанному циклу.
В случае изменения программы, т.е. при необходимости перемещения ремизной рамки вниз электромагниты 23 отключаются, включаются электромагниты 24 и вследствие этого колодки 18 прижимаются к поверхности удлиненного плоского конца 16 ползуна 16 и заклинивают его. А колодки 17 под воздействием пружины 25 отходят от . поверхности удлиненного плоского конца 15 ползуна 15 на расстояние , что позволяет ползуну 15 свободно перемещаться по направляющей 32.
Во время последующего движения ползуна 12 вверх точка О перемещается в правую сторону от линии перемещения ползуна 12 по окружности радиу
сом, равным длине тяги 11, с центром в точке крепления этой тяги в ползуне 16. Ползун 7 перемещается в правую сторону и, воздействуя на шарнирные тяги 6, 5, 4 и 3 приводит ремизную рамку 1 в нижнее положение.
Для того, чтобы во время рабочего хода прижатый ползун 15 или 16 не испытывал осевого усилия, которое могло бы привести к увеличению нагрузок на колодки 17 и 18 и уменьшению надежности их работы, в исходном положении между осями тяг 10 и 11 и между нормалями к плоскости скольже- гия ползунов установлен угол 6, имеющий значение, большее угла трения скольжения между ползунами 15 и 16 и направляющими 32 и 33. В начальной стадии рабочего хода усилие, возни- кающее вдоль тяг 10 или 11, в основно воспринимается направляющими 32 и 33 и очень малая часть, преодолевая силу трения, действует вдоль оси перемещения ползунов. С уменьшением угла б значение силы, действующей вдоль оси ползунов, сокращается, и при угле б ,меньшем , угла трения, исчезает полностью. Этот период рабочего хода соответствует моменту, когда начинается резкое увеличение сопротивления движению в ремизных рамках.
Значение угла j между линией, соединяющей точки крепления двухплечих рычагов 19, 20 и 21, 22 плечами этих же рычагов, связанньгх с колодками, всегда меньше угла трения между колодками и плоскими удлиненными частями ползунов, благодаря чему обеспечивается самозаклинивание пол-, зунов 15 и 16. Конструкция этого узла такова, что с увеличением силы, действующей вдоль оси ползунов, увеличивается сила зажима плоских уд
0
5
,Q 5
0
5
0
линенньгх частей ползунов и увеличивается надежность зажима.
В каретке создается закрытый зев. В программном устройстве можно использовать прогрессивные типы программоносителей, таких как перфолента, магнитная лента, а также микропроцессоры. Программное устройство не имеет механически переключающихся звеньев, позволяет прочитать программу и управлять движением ремизных рам в непрерьгоном режиме.
Конструкция каретки позволяет работать как прямым, так и обратным ходом.
Формула изобретения
Ремизоподъемная каретка ткацкого станка, содержащая привод, кинематически связанный посредством.рычагов с соответствующей ремизной ра:мкой, р программное устройство, с программоносителем и фиксаторами, отличающаяся тем, что, с целью повьш1ения надежности, быстродействия и расширения технологических возможностей, привод выполнен в виде кривошипно-ползунного механизма, программное устройство имеет два ползуна, установленных под углом один к другому с возможностью взаимодействия с соответствующим фиксатором, а ползун привода и ползуны программного устройства связаны между собой посредством тяг, обходящихся концами в одной точке, при эт.ом рычаг.и кинематически связьшающие привод с соответствующей ремизкой имеют ползун, посредством поводка шарнирно присоеди- ненньй к общей точке тяг, а фиксаторы вьшолнены в виде самозаклинивающихся колодок.
Hl/
/ff
| название | год | авторы | номер документа |
|---|---|---|---|
| Ремизоподъемная каретка для ткацкого станка | 1978 |
|
SU739143A1 |
| Двухподъемная негативная ремизоподъемная каретка ткацкого станка | 1990 |
|
SU1813130A3 |
| Ремизоподъемная каретка к ткацкому станку | 1979 |
|
SU861422A1 |
| Ремизоподъемная каретка для ткацкого станка | 1975 |
|
SU973678A1 |
| Ремизоподъемная каретка к ткацкому станку | 1976 |
|
SU735680A1 |
| Механизм управления ремизоподъемной каретки ткацкого станка | 1979 |
|
SU1087580A2 |
| Ремизоподъемная каретка ткацкого станка | 1986 |
|
SU1331920A1 |
| Ремизоподъемная каретка для ткацкого станка | 1977 |
|
SU659658A1 |
| Механизм управления ремизоподъемной каретки ткацкого станка | 1976 |
|
SU609796A1 |
| ПРИВОД РЕМИЗНЫХ РАМ РЕМИЗОПОДЪЕМНОЙ КАРЕТКИ | 2000 |
|
RU2167964C1 |
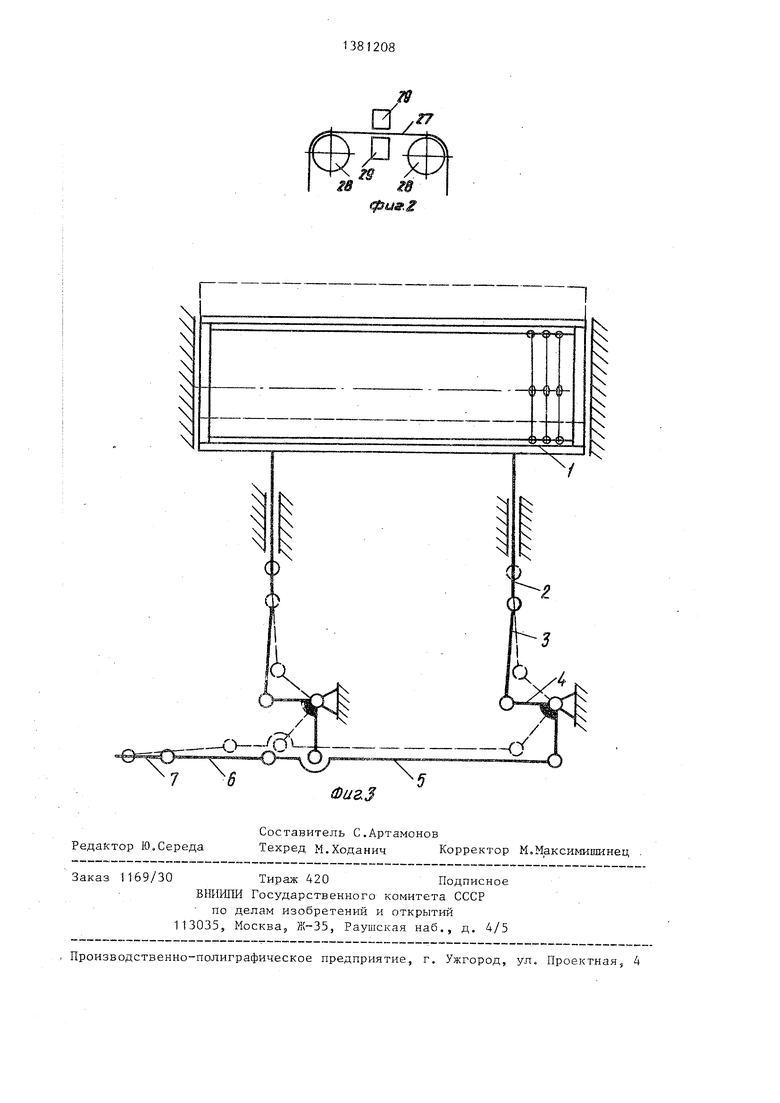
Изобретение относится к области текстильного машиностроения и может быть использовано во всек.типах ткацких станков для передачи ремизным рамкам программно-управляющего движения И позволяет повысить -надежность И быстродействие и расширить техно №j tS. логические возможности ремизоподъемных кареток. Ремизоподъемная каретка содержит привод,, кинематически связанный посредством рычагов с соответствующей ремизной рамкой, и программное устройство с программоносителем И фиксаторами, при этом привод выполнен в виде кривошипно-шатунного механизма 12-14, программное устройство имеет два ползуна 15 и 16, установленных под углом ОДИН к другому, а ползун привода и ползуны программного устройства связаны между собой тягами 9, 10 и 11 в точке О, с которой шарнирно связан посредством поводка 8 ползун 7j причем фиксаторы выполнены в виде самозаклинивающихся колодок 17 И 18, управляемых от электромагнитов 23 и 24. 3 ил. fS ff G Ю (Л с: 17 13 со 00 ГчЭ .«
о
) rU--l:
6
aj
| РЕМИЗОПОДЪЕМНАЯ КАРЕТКА | 0 |
|
SU316247A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
