i
(Л
а
со
00
Р
«X
8 и воздействутот встречно на стопу дозируемых листов. Рабочие элементы (РЭ) кинематически связаны с приводом, котор1 й позволяет производить отсекание стопы от дозированного пакета 5 и фиксирует РЭ при снятии лишних листов с оправки 6. РЭ могут дополнительно перемещаться относи381658
тельно траверсы 8 в радиальном ня - равлении вокруг осей К и по пазу 13 в осевом направлении. При движении снятой с оправки 6 лишне11 части стопы относительно плунжера 3 вверх осуществляется отделение сцепившихся с ней листов пакета 5. 1 з.п. ф-лы, . 2 ил.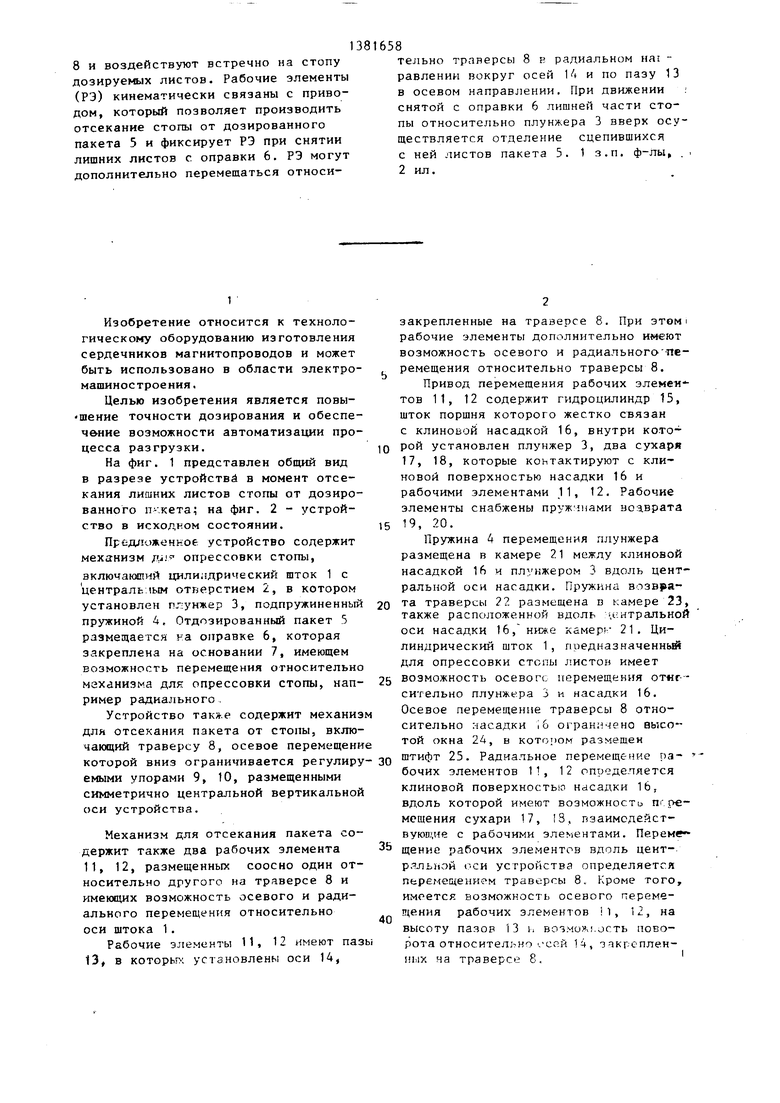
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дозирования пакетов магнитопроводов | 1990 |
|
SU1734168A1 |
| Устройство для дозирования пакетов магнитопроводов | 1988 |
|
SU1603492A2 |
| Устройство для дозирования пакетов магнитопроводов | 1979 |
|
SU904110A1 |
| Устройство для сборки пакетов магнитопроводов электрических машин | 1983 |
|
SU1153378A1 |
| Автомат для изготовления пакетов магнитопроводов электрических машин | 1982 |
|
SU1078540A1 |
| Полуавтомат для сборки сердечников электрических машин | 1986 |
|
SU1415337A1 |
| Автомат для сборки пакетов магнитопроводов электрических машин с валом | 1979 |
|
SU864442A1 |
| Устройство для дозирования пакетов магнитопроводов | 1987 |
|
SU1508316A2 |
| Автомат для изготовления пакетов магнитопроводов электрических машин | 1984 |
|
SU1334294A1 |
| Устройство для пакетирования пластин магнитопроводов электрических машин | 1977 |
|
SU752639A1 |
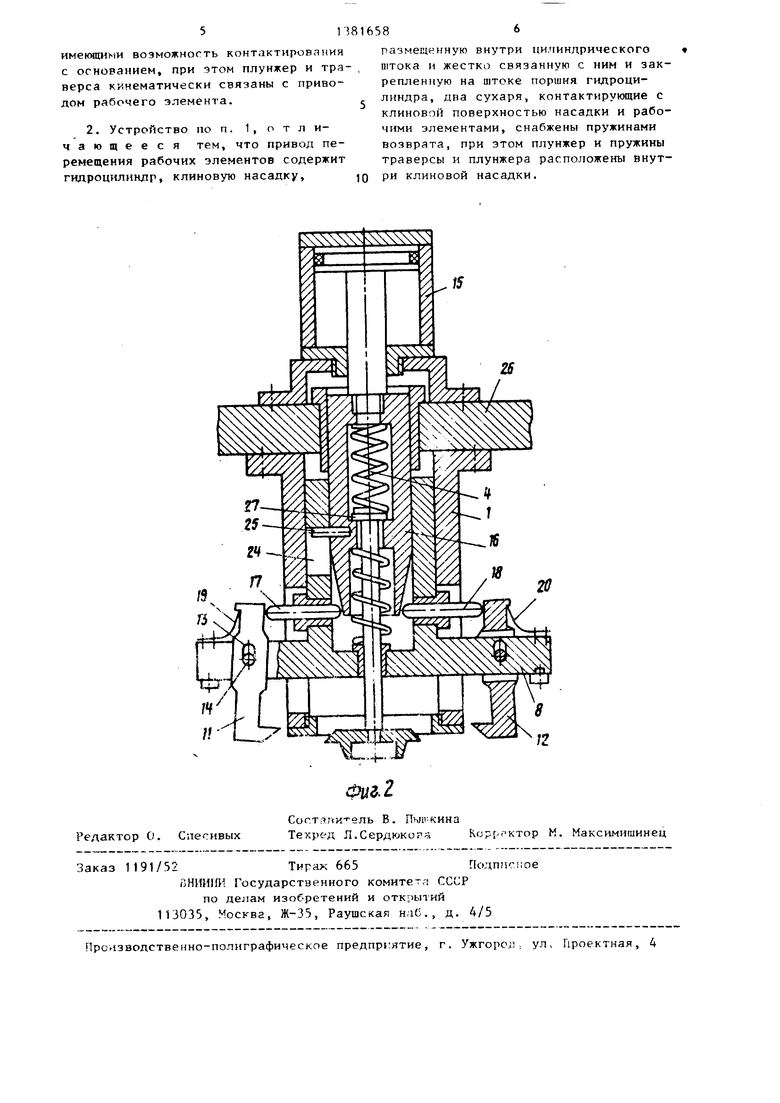
Изобретение относится к технологии производства магнитопроводов и м.б. использовано в области электромашиностроения. Цель изобретения - повышение точности дозирования и обеспечение возможности автоматизации процесса разгрузки. Для повьппе- ния точности дозирования и автоматизации процесса разгрузки устройства в его механизме для отсекания стопы имеются два рабочих злемента 11, 12, которые размещены соосно на траверсе
Г
Изобретение относится к технологическому оборудованию изготовления сердечников магнитопроводов и может быть использовано в области электромашиностроения.
Целью изобретения является повы- ение точности дозирования и обеспечение возможности автоматизации процесса разгрузки.10
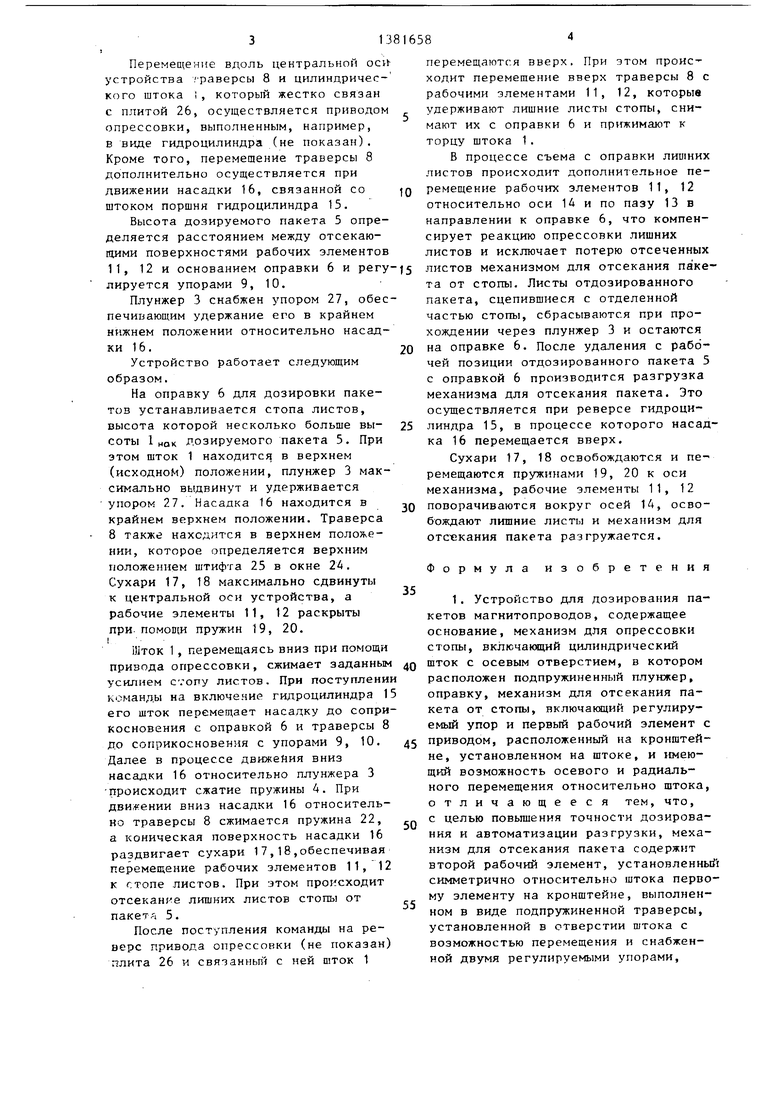
На фиг. 1 представлен общий вид в разрезе устройств в момент отсекания лишних листов стопы от дозированного П .кета; на фиг. 2 - устройство в исходном состоянии.15
Предложенное устройство содержит еханизм опрессовки стопы,
включаюший цилиндрический шток 1 с центральным отверстием 2, в котором установлен плунжер 3, подпружиненный 20 пружиной 4, Отдозированный пакет 5 размесчается на оправке 6, которая закреплена на основании 7, имеющем возможность перемещения относительно механизма для опрессовки стопы, нап- 25 ример радиального,
Устройство также содержит механизм для отсекания пакета от стопы, включающий траверсу 8, осевое перемещение которой вниз ограничивается регулиру- 30 емыми упорами 9, 10, размещенными симметрично центральной вертикальной оси устройства.
Механизм для отсекания пакета соержит также два рабочих элемента 35 11, 12, размещенных соосно один относительно другого на траверсе 8 и меющих возможность осевого и радильного перемещения относительно
,40
оси штока 1.
Рабочие элементы 11, 12 имеют пазы 13, в которьге установлены оси 14,
закрепленные на траверсе 8. При этом рабочие элементы дополнительно имеют возможность осевого и радиального -перемещения относительно траверсы 8.
Привод перемещения рабочих элемеитов 11, 12 содержит гидроцилиндр 15, шток поршня которого жестко связан с клиновой насадкой 16, внутри которой установлен плунжер 3, два сухаря 17, 18, которые контактируют с клиновой поверхностью насадки 16 и рабочими элементами 11, 12. Рабочие элементы снабжены пруж- .иами ноаврата 19, 20.
Пружина 4 перемещения плунжера размещена в камере 21 между клиновой насадкой 16 и плунжером 3 вдоль центральной оси насадки. Пружина возврата траверсы 22 размещена в камере 23 также расположенной вдоль i,t-:HTpальмой оси насадки 16, ниже камер -- 21, Цилиндрический шток 1, предназначенный для опрессовки степы листов имеет возможность осевого перемещения от«г- сительно плунжера 3 и насадки 16. Осевое перемещение траверсы 8 относительно насадки i& ограничено высотой окна 24, в котором размещен штифт 25. Радиальное перемещение па- бочих элементов П, 12 определяется клиновой поверхностью насадки 16, вдоль которой имеют возможность пгре- мощения сухари 17, 18, пзаимодейст- с рабочими элементами. Перемв щение рабочих элементов вдоль цент- РЛЛЫ10Й оси устройства определяется перемещением траверсы 8. Кроме того, имеется возможность осевого перемещения рабочих элементов il, 12, на высоту пазор 13 ii возмож.ость поворота относительно . СР-й 14, закрепленных на траверсе 8.
Перемещение вдоль центральной oc устройства раверсы 8 и цилиндрического штока I, который жестко связан с плитой 26, осуществляется приводом опрессовки, выполненным, например, в виде гидроцилиндра (не показан). Кроме того, перемещение траверсы 8 дополнительно осуществляется при движении насадки 16, связанной со штоком поршня гидроцилиндра 15.
Высота дозируемого пакета 5 определяется расстоянием между отсекаю- пшми поверхностями рабочих элементов 11, 12 и основанием оправки 6 и регу лируется упорами 9, 10.
Плунжер 3 снабжен упором 27, обеспечивающим удержание его в крайнем нижнем положении относительно насадки 1 6 .
Устройство работает следующим образом.
На оправку 6 для дозировки пакетов устанавливается стопа листов, высота которой несколько больше вы- соты 1 HQK дозируемого пакета 5. При этом шток 1 находите в верхнем (исходном) положении, плунжер 3 максимально выдвинут и удерживается
упором 27. Насадка 16 находится в крайнем верхнем положении. Траверса 8 также находится в верхнем положении, которое определяется верхним положением штифта 25 в окне 24. Сухари 17, 18 максимально сдвинуты к центральной оси устройства, а рабочие элементы 11, 12 раскрыты
при. помощи пружин 19, 20. I
Шток 1 , перемещаясь вниз при помощи
привода опрессовки, сжимает задаиньм усилием стопу листов. При поступлении команды на включение гидроцилиндра 15 его шток перемещает насадку до соприкосновения с оправкой 6 и траверсы 8 до соприкосновения с упорами 9, 10. Далее в процессе движения вниз насадки 16 относительно плунжера 3 -происходит сжатие пружины 4. При движении вниз насадки 16 относительно траверсы 8 сжимается пружина 22, а коническая поверхность насадки 16 раздвигает сухари 17,18,обеспечивая перемещение рабочих элементов 11, 12 к стопе листов. При этом происходит отсекание лишних листов стопы от пакета 5.
После поступления команды на реверс привода опрессовки (не показан) плита 26 и связанны с ней шток 1
д
5
0
5
0
5
0 5 „
5
перемещаются вверх. При этом происходит перемещение вверх траверсы 8 с рабочими элементами 11, 12, которые удерживают лишние листы стопы, снимают их с оправки 6 и пр1тжимают к торцу штока 1 .
В процессе съема с оправки лишних листов происходит дополнительное перемещение рабочих элементов 11, 12 относительно оси 14 и по пазу 13 в направлении к оправке 6, что компенсирует реакцию опрессовки лишних листов и исключает потерю отсеченных листов механизмом для отсекания пакета от стопы. Листы отдозированного пакета, сцепившиеся с отделенной частью стопы, сбрасываются при прохождении через плунжер 3 и остаются на оправке 6. После удаления с рабочей позиции отдозированного пакета 5 с оправкой 6 производится разгрузка механизма для отсекания пакета. Это осуществляется при реверсе гидроцилиндра 15, в процессе которого насадка 16 перемещается вверх.
Сухари 17, 18 освобождаются и пе- ремещаются пружинами 19, 20 к оси механизма, рабочие элементы 11, 12 поворачиваются вокруг осей 14, освобождают лишние листы и механизм для отс екания пакета разгружается.
Формула изобретения
имеющими возможность контактирования с основанием, при этом плунжер и тра- верса кинематически связаны с приводом рабочего элемента.
.
Фиг. 2
Редактор О. Спесивых
В. Пыи кина
Теу-р -Д Л.Сердкжора М. Максимишинец
размещенную внутри цилиндрического штока н жестко связанную с ним и закрепленную на штоке поршня гидроцилиндра, два сухаря, контактирующие с клиновой поверхностью насадки и рабочими элементами, снабжены пружинами возврата, при этом плунжер и пружины траверсы и плунжера расположены внутри клиновой насадки.
| Устройство для дозирования пакетов магнитопроводов | 1979 |
|
SU904110A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
