со
00
го
СП
4
Изобретение (иносится к авюч,; iiua.ain производственных процессов, предна:}начен() для приведении дегилей в определенное заданное положение и их выдачи на но.ицик1 последующей обработки, контроля, сборки и может быть испо..чьзовано в ра 4личпы: областях промьинленности при о|11-;и1и:1акии гибких автоматизированных хололпоштам- ПОБОЧНЫХ и сборочных производств.
Цель изобретения - повышение производительности, точности ориентирования и расширение технологических возможностей при одновременном упрощении устройства за счет возможности ориентации у(1 юйс1- вом деталей, обладаюпхих осевой асимме рией во внешних или внутренних контурах, что позволит расширить область использования устройства.
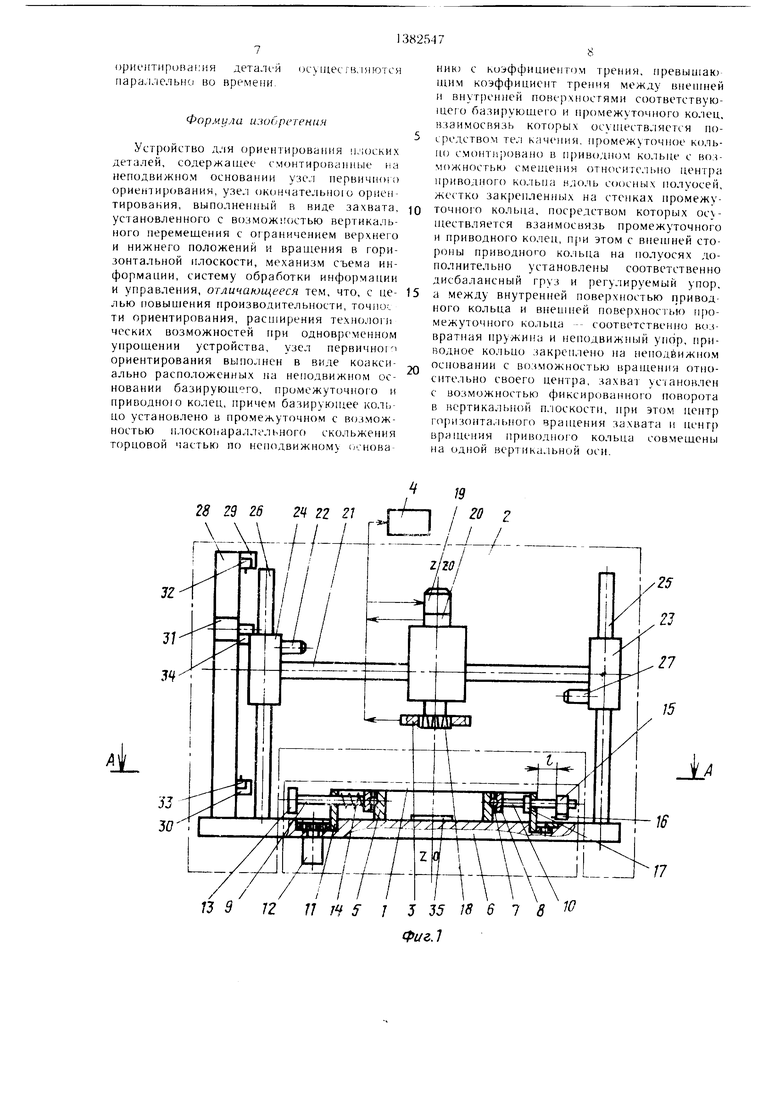
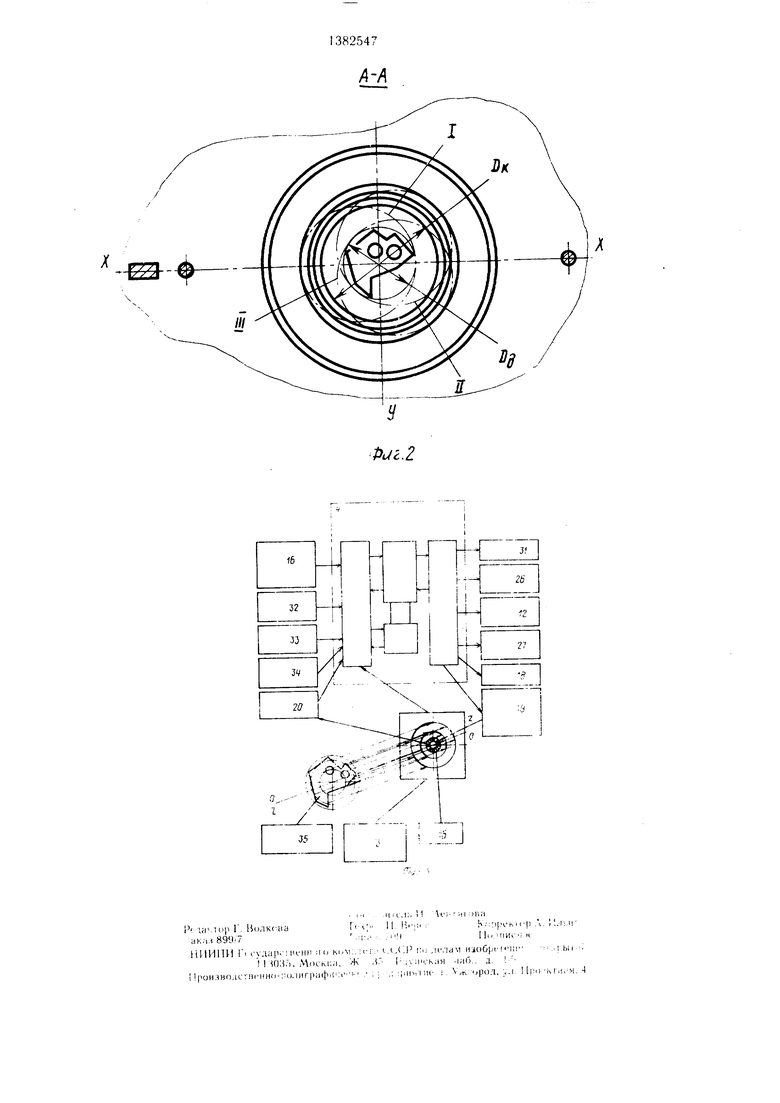
На фиг. представлено устройство для ориентирования плоских деталей; на фиг. 2 разрез А-А на фш. 1, на фиг. Л связи датчиков устройства съема инфс)(1мации, исполнительных приводных устройств и механизмов с системой обработки ипфо мации и унравления.
Устройство .чля ориентирования плоских деталей содержит узел 1 первичного ориен тирования и лсл 2 окончательного ориентирования Д(-1але| |, механизм 3 сьслк информации и систему 4 обработки инфо мапии и упраьлечия.
Узел iivp:,(M4) ориснти)) ..);; c, жит 6,.fi H nin -, кольцо 5, 1 г1ног);1еинос с BI 3: ОЖ1Н)С ьк) г. .ocKoiiajin, |ЛСль гЮ1 о сколь- жени/- ni ч;.стьк) но 1 1;одви;кном ,
J-.HOBaii; H : к :jij-ij : ПИеМТоМ :;н ИИЯ, ПГ BhUJlcirf H : ко ф( ( ;;nf H ; реН ; :v
BiieiHift I. ii п i .и ннеГ iioRCjixHOi 1 1.;и ,-; ветстве ; ;, 0,1 ;ир H)Ui- ro и примо/:-, .,-г( колеи, взаямосвизь которых осу . гвл-г -: ся посредством качения (возми/кнс) гакжо применение 11: енмагической и.1и гидра.ьличе ской связ). Промежуточное Ko. ibiu.- Н гвя зано носре..ст.шм жестко закрепленных в его стенках соосных (кхмуссей 9 и 10 с приводи :.м кольцом 11, обо )у;1ованным г риво. цчым механизмом 2. На полуоси 9 со cTopoib,, BHeiii ней поверхности приводного кольца 1 сга новлен дисбалансчый груз 13, а межд ренней и внешней поверхностью COOISUMCT венно приводного ко.чьца 11 и нромсжугоч мого колец 8 - возвратная пружина II На полуоси 10 со стороны вне1нней ионерх ности приводного кольца 11 ycranoB:iet( ре гулируемый утюр lo с закрецленны.м на нем датчиком 16 конечного положения базирующего юльца 5 (корючное положение базм.- рующего кольца 5 соответствует оконч ник.) процесса первичного ориентирования де тали), а .между В {ешней и внутренней по- вет хностями соотвелственно промежуточно го кольца 8 и приводного кольца 11 уста новлен неподвижный упор 17. При этом ба зируюшее кольцо 5, промежутг)чное кольцо 8 и приводное кольцо 11 расположены коаки-.алыи) Приводное к(у 1ьцо IS выпо.-нено с возможностью тoл.кo вращения от .оси- тельно своем) центра ь оризон- ально плоскости (.ВИ31, приводного кольца И с промежуточным K.n. ibHOM t носредствоу полуосей и и (к к 1. нечивает нозможн(л; Г1- ;laдиa. Il,н(гo смеп1ения промежут()чн()|-о кольца Н относительно центра 1 риводнп1;| кольца II
Узе;1 2 окончатсльног- ориентировании соде)жит захват 18 с )ов.1енным на нем
механизмом 3 съема информации (установка механизма 3 на захвате 18 осуществляется, в частности, при liiiU fi. ineHHH механизма 3 в виде датчика типа «чувствительная поверхность (ДЧН). Захват 18 снабжен прис водным yclpoйcтвi М 19 позиционного тина (для осушествления вращения захвата в горизонтальной н.чоскости при угловом ориентировании дега.ей), механически связанным с датчиком 20 упоного положения захвата. Захват 18 yciaiiOB. ieH tia горизонталь0 ном валу 21 таким образом, что цептр горизонтального врашения захвата 18 и врантения нриводно10 ко.чьца 11 совмещены на одной Ь . ртикальной оси. При этом концы вала 21 вмоити)ованы в каретки 22 и 23 с - 03м)Ж1ик тью фиксированного поворота вала 2; н;; 180° OTHOI ите. своей оси (для обеснечения возможности поворота захвата 18 в вертикальной плоскости) Каретки 22 и 2. установлены с возможное тьк вс рти- .аль;1О10 перемещения соогвот ственно на
г манр..вляклцих 14 и .. К(з зак ;С:-ленны:. Нс1 неподвижном оснсьчпни ч, it.- ка ют ках 22 и 23 vooTpi твенно yci ан(Л5.тепы jipn вод 11ертикалт,Н IЧ) пег.емсшения и при- г,ол 27 ф ИКсирова: ;н Ч о OHfJi Tra вал 2.
Ма Непо;, НИЖНОМ с.)1ом;; ...ч ( С на1 11раиля:.пцеч 24 жс -тко -/-«KI еплен мтейн 28, rjfrv;;.л ен1:1)1Й Н1-пч-и1; 1 snopoivi 29, нижним упором 30 и С1)(-дн:)м июром 31. и.1полнен11)ми таким (;браз;),: что каре :-- ка 22 имеет возможность ..-л.-зничсского ;.он так1 фоьания с рас1к. 1;)жен11; :ми на кро.н- штейне 28 упорами 29 3 (за счег чегс Ч П астся всзуо.4 нос-1 f. фик . уцпи по . НОГИ тельио ;;сьова|-.я I ;;ед||ий vi.op 3 вьи.ч.-л- ,1.1ожно,:тью фиксации и выполняет й/уг.кцию
фикс:;,п(|рт каретки 22 -тли ограничения U(;- ложенц.ч захвата 8 па Д(1 1олиительном уровг- (в зав11симости от положения поверхности ориеит 1ру дет,1. ill сп носигель- но повер/Hi v ги ус: -I d 3 с ьемг. инфорQ мации v ;орь 29--31 оборуд 1ваны соот- t .г 1 венно датчиками верхно -;. 32, нижнего 33 г. среднего 34 положений захвата 18 УохйшЛесгсая связь захвата 18 с установлен ым на нем устройством 3 съема информации ( случая выполнения ус: рои:;тва 3
i в виде ДЧП) выпол.неня таким образом, м о н;ы вращении .м)а 8 в гори.зонталь- ной плоскости мех.ч (изма о съема информация чеподвижгк; о, не- iiri, л.)НО основания 6,
0
5
ложения захвата 1 6 на трех уровнях). нен ги:)дг- 1жиым (с в в ,пвух положениях)
ii , вязь мехами,5ма Л сьома И1|фо|)1п с ориентиру мой дета.чью cio ;(амкиу1а с мо менпа захв ,а детали 35 до завершения операции окоичалелыюго о на итиронниия. IJu чодЕЛ датчиков 16, 32, 3/), 34 и 20 и оптветст- веино кинечиого моложеини бази 1 Ю1ие10 ко. ьца 5. углового по.ю/кеиия захвату 18, BepxiitT o , нижнего и среднего положения захвата 1«| механизма 3 1 ьема информ,а11ии Г1одк,лк)че)|ы к соответс вующим входам сиетемы 4 обработки информации и управле- мин, Г1одк. 1юченной своими выходами к г.ри- водному механизму 12, иодвиж юму упору 31 приводному устройству 19 позиционного типа, приводам 26 и 27 вертикального перемещения и фиксированного вертика.чьного поворота.
Механизм 3 съема информации кроме выполнения в виде ДЧП может быть В1)1гюл- нен в виде те;1евизионного датчика видеоинформации.
Устройство работает следующим образом. Ориентируемая деталь 35 подается из загрузочного устройства (не показано) на поверхность неподвижного основания 6 в зону, ограниченну о внутренней човерхно-тью базирующего кольца 5, которое в ис.сд|1ом состоянии расположено коаксиально с приводным кольцом 11 и промежуточным коль цом 8. Приводное кольцо 11 приводится во вращение от приводного механизма 12, за | уска( М(я о по команде исте.мы 4 обрабогкп информации и управлен1;я, и через ) и 10 / риводи7 во вращение промс/суточное кольц|1 8, кинематически связанное ме()ез тела 7 .качения с базирующим кольцом 5. При пращении промежу гочного кольца Н на дисба.1аисный г)уз 13, закрепленный на 1олуоси 9, действуо Ц чггробежиая си.ча, под действием которой дисбалансный груз 13 перемешается в направлении от центра вра- И1ен1:я приводного коль.па И, перемещая одновременно нромежуточное 8 и ; ,ирую- шее 5 ко.мьца. Предел перемеп1ения дисоа- лан . ного груза 13 адается при ( астройке устройства установкой регу. ируемого угк; ра 15 на величину /, .оюрая выби1)ается из условия
. -D .),
деОк - внутренний диаметр базирующего
кольца 5; D , - ди..метр описанной относительно
детали 35 окружности минима: ьн;.
возможным радиусом.
В процессе вращения и перемещения вдоль направляющих полуосей 9 и 10 ба зирующее ко;1ьцо 5 занимает последователь но по.южения 1, И и т. д , что оивноомьш/ обкатке окружности диаметром .0. вокруг окружности диаметром .Од с центром р. точке О. При этом внутренняя поверхность ба- .зируюшего к.)льца 5, контактируя с ориентируемой дегалью 35, приводит ее в зонх описанн1П1 огносителыг детали 3-5 окружное
0 о s 0
5
д 5
ти мипи. 1.1льно ио.зможным лиамет)о.м L) с центро.м в точке О, чем досгигается одновременное центрирование детали относите, 1ь- И1 осей Х.Х и VV, г. г. .1НЯ(гс-я операция первично о )иен И11ования дета.чи 35. В процессе перемещения полуоси 10 с закрепленным па ней ре1улируемым у1и.) ом 15 пос;:е.ч- ини достигает своего конечного положения, определяемого моменп. г.: сраб.ч . ынанпя датчика 16 конечног ).:ения базирующего кольца 5. При наличии сигнала датчика 16 конечного положения базирчюпкмо ко. 1ьца 5 система 4 обработки информации и управ.1е- ния после некоторой выдержки времени (достаточной для совершения приводным кольцом 11 одного-дву.ч оборотов) производит отключение приводного механизма 12, после чего приводное ко.льцо 1 останавливается и промежуточное кольцо 8 совместно с базирующим кольцом 5 под воздействием возвратной пружины 14 Бозврап1ае1ся в исходное состояние, опреде,пяемое положением неподвижпого упора 17. В моменг отклк)- чения приводного механизма 12 ориентируемая деталь 35 находится в зоне описанной относительно ее вчешпего конгура окружности минимально возможн1)1м радиусом, т. е. операция окончательного (.1риентирова- ния завершена. Для выполнения операции ок(Л1чательног о орпен гирования по cHina. iy системы 4 обрябо|ки HHif opMaiuin и управ- . вк.)ЮчаеТ М привод 26 всрт ика,1ЬН1)ГО |1е |..(-ме.ення, установ.ленный на каретке 22. При эгок карегки 22 и 23 опускаются |1доль iiai-равляюших 24 и 25 совместно с вмонтированным в них ва. юм 21 и соответственно с ,становленным на валу 21 захвагом 18 и при достижении кареткой 22 нижнего упо- )а 30 захнат 18 занимает свое нижнее положение, в котором осчшествляетси захват пе 1вично ориентированной дета.чи 35. . 1омент достижения захватом 18 CBoei o край не нижнего положения фиксируется системой 4 обработки инфор.мамии и , 1ения по сигналу с датчика 3-3 нижнего положения, в соо ветств1ы с которым си тема 4 обработки информа 1ии и управления подает команду на зах1:-ат 18 и некоторой выдержки времени, 1 еобходимого д,1Я надежно- 10 захвата ориентируемой детали 35, осуществляет реверс привода 26 вертикального перемещения, который возвращает каретки 22 и 23 в Bepxi ee положение, ог ределяемое 3 зависимости от положения поверхносги (зриептируемой детали 35 верхним 29 или средним 31 упорами. С/ьем информации о пол(.)Ж е1тии ориентируемой дета, 1и 35 осуществляется устройством 3 съема информации, находяпшмся в фиксированном заданном положении и представляюп1им собой в .lannoM копкретпом п})имере выполнения ycTjKuuiBa ориентирования датчик типа (дискрстп.чя чувстви гельная поверхность (сокращенно ДЧП( точечного типа. Информация, юстуиакниая с уст ройст ва 3
информации, обрабатывается системой 4 информации и управления в процессе возврата захвата 18 в его верхнее положение. В системе 4 обработки информации и управления осуществляется определение значения угла доориентирования детали 35 в горизонтальной плоскости путем нахождения разности между значениями угловых координат выбранных характерных точек деталей 35 в координатах ДЧП и требуемых значений координат этих точек, записанных в память системы 4 обработки информации и управления при ее настройке. При этом характерные точки деталей 35 выбираются таким образом, что исключается неоднозначность при считывании информации о положении поверхности ориентируемой детали 35 относительно поверхности устрой,ства 3 съема информации прямой (лицевой) или обратной (инверсной) поверхностями вверх. Это позволяет системе 4 обработки информации и управления кроме значения угла доориентирования в горизонтальной плоскости определять необходимость переворота деталей 35 относительно оси XX (оси вращения вала 21), который может осуществляться по команде системы 4 при выдаче ориентированных деталей на позицию последующей технологической обработки. Положение поверхности ориентируемой детали 35 отно сительно поверхности устройства 3 инф()рмг:ции определяется системой 4 обработки информации и управления сравнением информационных массивов, полученных с ДЧП в ряде хирактерных гочек, с массивгши, хирактеричуюп|,ими tiiHMoe или инверсное iio. j j- -;HHe opHCHTHpye. деталей 35, Htixo- дящи.мися в 1амяти системы 4 обработки информации н управления. На основании ,)езультатов сравнения системой 4 обработки информации и управления вырабатываются сигналы, определяющие дальнейшую работу устройства.
Ири этом, если ориентируемая 35 расг о. Юл.ена прямой (лице: ой) поверхностью по отношению к поверхности устройст на . 5 с ьема инфс.рмации, ю подъем кареток 22 и 23 и соотв тстаенно захвата 18 осуществляется до дос1ижения кареткой 1 : упора 29, что определяется моментом срабс тывания датчика 32 верхнего положения каретки 22. при наличии сигнала, с KOTOpoi o ,:с команде системы 4 обработки информй НИИ и управлении осуществляется отк./1юче- ние привода 26 вертикального перемещения. В случае крайнее верхнее положение jaxRaTa 18 ограничено упором 29, а опреде ление значения угла доориентирования детали 35 в горизонтальной плоскости производится по значениям координат точек де тали 35, находящимся в памяти системы 4 обработки информации и управления, cooi ветствующим прямому положению дета ли J5.
Если ориентируемая деталь ..55 расп ло- жена обратной стороной (инверсной) по отнощению к поверхпг)1 ти устройства 3 съема информации, то подьем капеток 22 и 23 с захватом 18 осуществляется ю срабат1.|ва- ния датчика 34 среднего положения каретки 22. по сигналу с которогг) система 4 обработки информации и |рив.тения выдает команду на выдвижение подвижного среднего упора 31, ограничивающее дальнейщее
0 вертикальное перемещение каретки 22 и опре деляющего крайне верхнее положение . хвата 18 в данном случае. При этом для опре деления значения угла доориентирования в горизонтальной плпс косги используются значения координат характерных точек
5 ориентируемых деталей в памяти системы 4 обработки информации и уп : авления, соответствующие инверсному Г1о;1ожению детали 35.
При достижении каретками 22 и 23 и соот0 ветственно захвата 18 своего крайне верхнего положения, определяемого в зависимости от положения поверхности (прямого или инверсного) детали 35 относительно поверхности устройства 3 : ьема информации либо верхним упором 29 (при прямом поло5 жении детали 35), либо подвижным упором 31 (при инверсном положении детали 35), система 4 обработки информации и управления на основании полученных значечий ра: . ности координат Bbi.iat-r комаплу нн прив(. , 1юе устройство 9 i: iчиционно о гипа захвата 18, .И) отработке кото мй осупгесгв 1яется поворот детали 35 вращение.м захвата 18 на )ужный угол ь горизонтальной плоскости. I е. вьиюлняется операция олонч Г1 льн : g ориентирования.
)г - Ьсли крайне верхнее положещк каре
ток 22 и 23 и захвата 18 о: раничивг:ется подвижным средним упором 31 ( инверсном положении детали 35), то система 4 обрабог- кн информации и управления одновременно
0 с выполнением операции г.- ового ориентирования выдает команду i;-j привод 27 фиксированного поворота вала 21, по которому производи.ся фиксированный поворот на 180 ЗгЧ.вата 18 Р вертикальной плоскости. Рас юяние между поро.м 29 верхнею положения и 11,)движным средним упором 31 выбирается 1аким иСразом, что не.ии исимо от того, выполняется и,-и не выполняется операция переворота на 180 детали 35 от- носнтель.чо Rii.n;) 21, сориентироваг-ная деталь 35 выдается на позицию последующей те. нологнческой обработки на одним и том ; Г горизонтально./ уровне относительно О . .-ли ия 6 устройства.
В момент достижения захватом 18 крайне верхнего положения з pa6o4VK) зону узла 1
5 первичного ориентирования поступает гледу- .ая деталь 35. Далее процесс ориентирования деталей повто ;яет я с той разницей, ТО операции 11ервц1;и(:го и окончательного
0
5
0
7
()риеитирова1:ия детаЛ1 й параллельно во времени.
(jcyiuecrB.isiFOTCH
Формула изобретения
Устройство д. 1Я ориентирования плоских деталей, содержащее смонтированные на неподвижном основании y:w.: первичишо ориентирования, узел окончате.чьною ориентирования, выполненный в виде захвата, установленного с возможностью вертикального перемещения с ограничением верхнего и нижнего положений и вращения в горизонтальной нлоскости, механизм съема информации, систему обработки информации и управления, отличающееся тем, что, с целью повышения производительности, точное ти ориентирования, расширения технологи ческих возможностей при одновременном упрощении устройства, узел первичного ориентирования выполнен в виде коакси- ально расположенных на неподвижном основании базирующ°го, промежуточного и приводною колец, причем базирующее кольцо установлено в промежуточном с возможностью нлоскоьараллс льного скольжения торцовой частью по непОдТ,вижному основа8
0
5
0
НИК) с коэффициентом трения, превышаю щим коэффициент трения между вне1нней и внутрен)1ей поверхностями соответствую- |цего базирующего и промежуточного колец, взаимосвязь которых осуществляется посредством те;| качения, промежуточное К(хпь- цо смонт111)овано в приводном кольце с возможностью смещения отнс1сигс, 1ьно центра нриводного ко.льиа вдоль соосных нолуосей, жестко зак)е11ленных на стенках промежуточного кольца, посредством которых осуществляется взаимосвязь промежуточного и приводного колец, этом с внешней стороны приводного кольца на нолуосях дополнительно установлены соответственно дисбалансный груз и регулируемый упор, а между внутренней поверхностью приводного кольца и внешней поверхносгыо ri)o- межуточного кольца -- соответственно возвратная пружина и неподвижный унор, приводное кольцо закреплено на ненодвижном основании с возможностью вращения относительно своего центра, захват установлен с возможностью фиксированного поворота в вертикальной плоскости, нри этом центр горизонта. 1ыюго вращения захвата и цент) вращения нриводног о кольца совмещены на одной вертика.1ьной оси.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации валов | 1984 |
|
SU1202803A1 |
| Устройство для ориентации деталей | 1990 |
|
SU1706835A2 |
| Гибкая производственная система | 1989 |
|
SU1672704A1 |
| Станок для обработки деталей | 1972 |
|
SU552180A1 |
| Манипулирующее устройство | 1982 |
|
SU1093537A1 |
| Полуавтомат для сборки изделий типа галетных переключателей | 1981 |
|
SU1069971A1 |
| Устройство для перемещения и ориентирования штучных заготовок | 1987 |
|
SU1433588A1 |
| Манипулятор | 1974 |
|
SU547336A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| Автоматизированная транспортно-накопительная система | 1987 |
|
SU1458163A2 |
И ;оГ1рет( иис относится к ав юмати.ш- ции nixiM .и1),.(.-тнениы ii|i)i eccoB, ntie.uia- I la iCiio ,: я .(ведения дета.иЧ в ,; д:(И|;о( ;о.|ожен11 и их выдачи па по.ицин) iioe,. ie- .; K. iiii. M : ::;|)с.Г|1 ггки, кс 1|тр(1., сборки, и мо- ; .г т бы Ь 11С1 .(Х 11):к)вапо мри 0|)гини lanHH -iO.Ki; ;).;;o.4;i ;iiiT.)ir -ночны.х производств. 11 юп .е ме no:iBu iiii ; повысить производи i е. и. 1И)оце( са ))(. итироваиия, точ- i;(jc;i, I M) В1.1и пие:пг. приеитировать детали I ll . И мк )ат)но1 | руи11Ы, к то.м чис- ,| II, .. rt.,.: анлиие occBoii асимметрией (jTHociiгельио своих внеиши.х и ннугрепии.х геометрических коитурон. Эго достигается тем, что в у.зле ориентирования операции 11ервичио|-о ориеитированияцентрирования .четалсм по осям ХХ и YV и оконч,:- Te.iiHoio ориентирования yi ioBoio ориеитирования деталей выполняются различными ф икиионально независи 11 1ми Hciu.).iinrre;ib- ными механизмами, сол.е 1жани1ми коакси- алыю расположенные на ненодг.ижиом основании :1(1нводное, промежуточное и оази- руюип е Ko.uHia, кинематически CF язaнныe ,и-/..Г . сопой Г: неподвижным основанием. N с I poiic I во с ьема ин4н)1ма1и И ijiiipMii iyeT СИ1 lia ib, нчс ; viiaiOHuie в счн-темч )11ГКИ И11(|1орм,пин н управ.. : ч нонанни оГ)Г.(1Гки полученньгх с |гналс р. игушеств- ОЯ1 iCH иы.чача команд на разли пп.н Hciio. i- HMii льные ме.;1ни.1мы устро11ства. -)им обес- нечиваск. - нозможиост1, орие1ггиро|- 1ния .те- та.:ей. or.ia.iaioHUix occ Boii асимметрией. 3 ил. (Л
28 29 26 24 22 21
/ / /
dL
3 J
--CZZ
