1
Изобретение относится к транспорт- га.1м средствам с мускульным приводом, а именно в веломобилям.
Цель изобретения - удобство управ- ления.
На фиг.1 изображен мускульный привод, обхгщй вид; на фиг.. - привод, например, как тренажер для гребцов; на фиг.З - то же, при использовании на прицепе; на фиг.4 - то же, при использовании на роликовой доске.
Мускульный привод .содержит элемент управления, СОСТОЯРЩЙ из рукояток 1 и 2. Рукоятка 1 закреплена на оси с возможностью вращения. Ось 3 через кронштейн 4 прикреплена к блоку 5 с винтовой канавкой с. Блок 5 закреплен на оси 6 с возможностью врар1ения. Ось 6 через крошчтейн 7 прикреплена к оси 8 рукоятки 2, Длины крошчтейнов 4 и 7 равны. Рукоятка 2 имеет возможность перемещения вдоль оси 8 и связана с перемещением отпора 9, подпружиненного пружиной 10. Стопор 9 взаимодействует с отверстием 11 на оси 3.
На блоке 5 закреплен и намотан один конец гибкой связи 12, другой . конец которой намотан на шкиве 13, имею1чем канавку с пространственным спиральным профилем. Шкив 13 через обгонную мз фту (храповик) 14 связан с вращением приводного вала 15 колес Шкив 3 связан с рамой 16 спиральной пружиной 17. Конец гибкой связи 12 крепится к участку спиральной канавки шкива 13, наиболее удаленному от оси шкива, так что сматьшание гибкой связи с него начинается с более при- блю-сенных к оси участков и кончается более отдаленными. Возможно крепление конца гибкой связи 12 к участку канавки, более приближенному к оси, и сматывание ее в обратном порядке.
Для визуального наблюдения за установленным передаточным отношение трансмиссии к оси 6 блока 5 в месте схода с него гибкой связи 12 прикреплена планка 18 со шкалой. Шаг рисок равен шагу винтовой канавки блока 5. Установленное передаточное отношение водитель определяет по совмещению гибкой связи 12 с риской шкалы.
Мускульньп1 привод работает следую щим образом.
В режиме привода водитель подтягивает к себе рукоятки 1 и 2, что чере гибкую связь 12 вызывает вращение
13
ю
15 20 25
30 а, ,с 40
м
-,
з
827352
щкива 13, а через обгонную муфту 14 и вращение приводного вала 15. При холостом ходе рук от себя гибкая связь 12 сматывается на шкив 13 спиральной пружиной 17.
В режиме изменения передаточного отношения водитель рукой отжимает рукоятку 2 от рукоятки 1 (при этом стопор 9 выходит из отверстия 11) и вращает рукоятку 1 с блоком 5 вокруг оси 6 в желаемую сторону, сматывая или наматывая гибкую связь 12 на блок 5. После установки желаемого передаточного отношения, сделав один или несколько оборотов, рукоятки фиксируются одна относительно другой при их совмещении стопором 9 через пружину 10. Изменение передаточного отношения достигается за счет того, что используется в процессе привода уже другой участок спиральной канавки щкива 13, более удаленный или более приближенный к оси шкива 13.
На фиг.2 гибкая связь 12 дополнительно перекинута через блок 19, закрепленный на раме 16. Управление осуществляется ногами через упоры 20, которые прикреплены к поворотной вилке 21 переднего поворотного колеса. Данный вариант особенно с подвиж- ным сиденьем может найти применение как тренажер для гребцов.
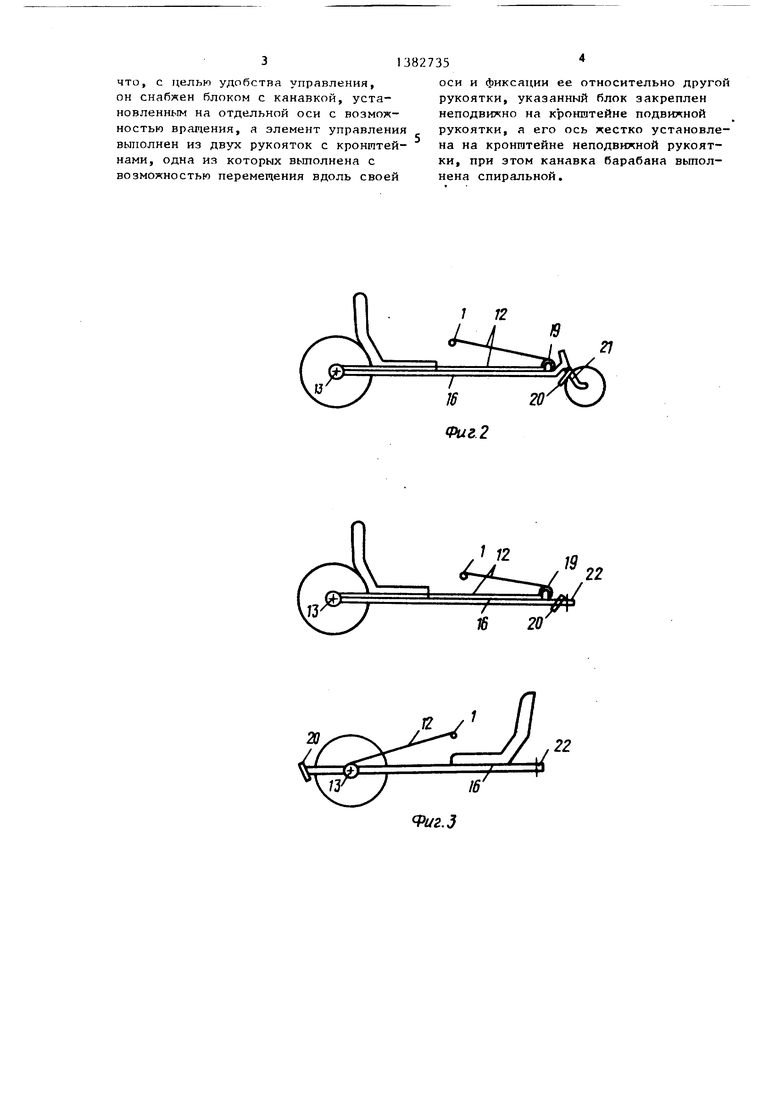
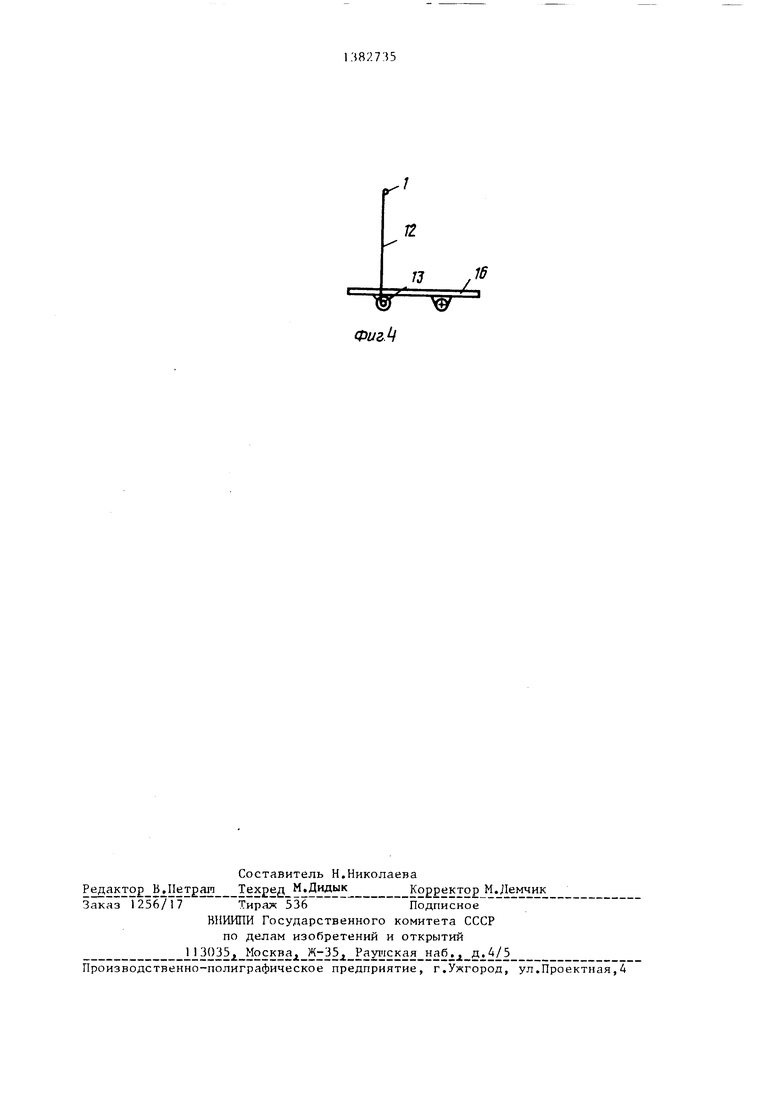
На фиг. 3 показан мускульный привод на прицепах к веломобилю. Прицепы снабжены проушиной 22, цепля- емой к веломобилю. Водитель веломобиля, устав работать ногами, может пересесть на прицеп, поменявшись с пассажиром и перейдя на ручной привод. Указанный привод можно применять и к роликовой оске (фиг.4), сделав одно из колес приводным, что повышает скоростные возможности доски, развивает дополнительные группы мышц и повьппает круговой эффект.
Формула изобретения
Мускульный привод транспортного средства, содержащий элемент управления, связанный тягой с механизмом изменения передаточного отношения, который посредством гибкой тяги связан с подпружиненным бара баном, на котором выполнена канавка для размещения указанной гибкой тяги, при этом барабан размещен на оси ведущего колеса, отличаю шийся тем.
50
55
что, с целью удобства управления, он снабжен блоком с канавкой, установленным на отдельной оси с возможностью вращения, а элемент управления выполнен из двух рукояток с кронштейнами, одна из которых вьтолнена с
возможностью перемещения вдоль своей
2735
оси и фиксации ее относительно другой рукоятки, указанный блок закреплен неподвижно на кронштейне подвижной рукоятки, а его ось жестко установлена на кронштейне неподвижной рукоятки, при этом канавка барабана вьтолнена спиральной.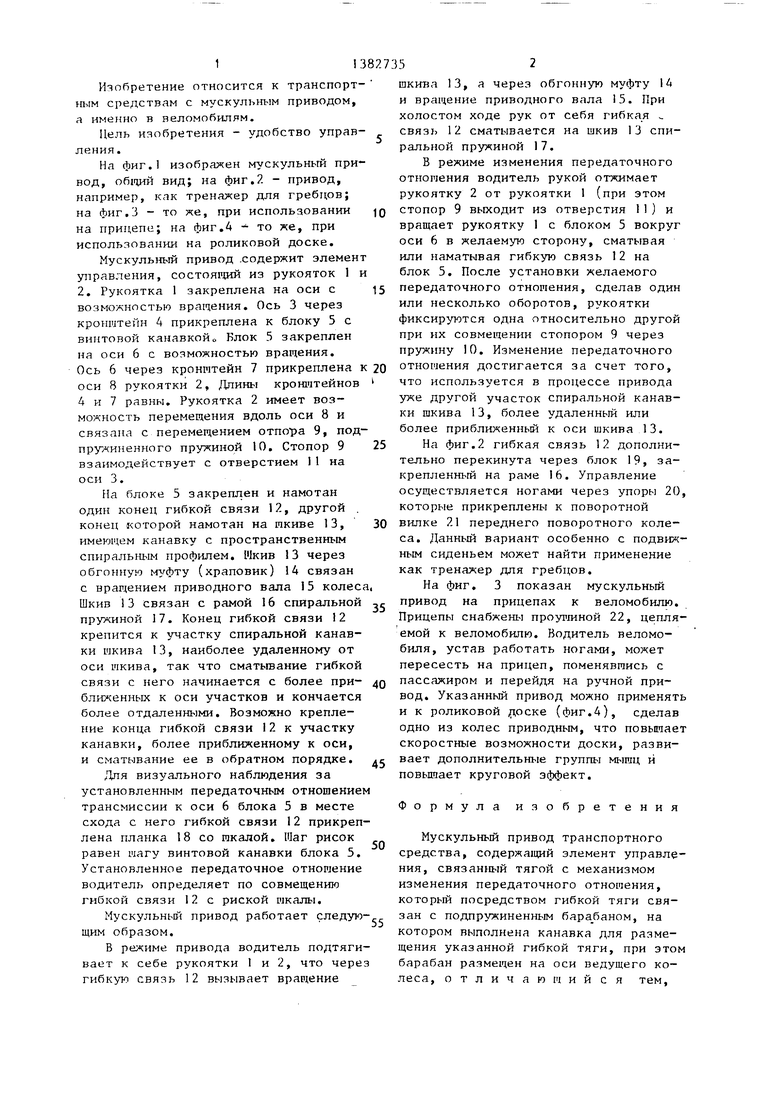
| название | год | авторы | номер документа |
|---|---|---|---|
| Мускульный привод транспортного средства с возвратно-поступательным движением педалей | 1986 |
|
SU1373619A1 |
| ВЕЛОСИПЕД С ЛИНЕЙНЫМ ПРИВОДОМ С ПЕДАЛИРОВАНИЕМ И ДВИЖЕНИЕМ АКАДЕМИЧЕСКОЙ ГРЕБЛИ | 2009 |
|
RU2413649C1 |
| Транспортное средство | 1987 |
|
SU1468815A1 |
| Веломобиль | 1986 |
|
SU1399210A1 |
| ВЕЛОСИПЕД С ДВИЖЕНИЕМ АКАДЕМИЧЕСКОЙ ГРЕБЛИ | 2007 |
|
RU2348563C2 |
| САМОКАТ | 2012 |
|
RU2520634C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| Устройство для приведения в действие транспортных средств мускульной силой человека | 1987 |
|
SU1512849A1 |
| ПРИВОД ДЛЯ ВЕЛОСИПЕДОВ И ВЕЛОМОБИЛЕЙ | 2005 |
|
RU2294859C1 |
| Веломобиль | 1989 |
|
SU1702869A3 |
Изобретение предназначено для использования в веломобилях или прицепах к ним. Цель изобретения - удобство управления. Мускульный привод включает рукоятки 1 и 2, связанные с приводным валом 15 через гибкую связь 12, намотанную на шкив 13 с канавкой имеющей пространственный спиральный В W (7 профиль, обгонную муфту 14, спиральную пружину 17 К одной из рукояток через рычаг прикреплен блок 5, на который намотана гибкая связь 12. Блок 5 находится на оси 6, к которой через кронштейн 7 прикреплена другая рукоятка, причем оси 6 и 8 рукояток параллельны друг другу. Гибкая связь крепится к участку спиральной канавки шкива, наиболее удаленного от оси шкива. Одна из рукояток может перемещаться вдоль своей оси. Подпружиненный стопор 9 взаимодействует с другой рукояткор{ в момент соосного совмещения рукояток. Блок 5 имеет винтовую канавку, а к оси 6 блока 5 в месте схода с него гибкой связи прикреплена планка 18 со шкалой. 4 ил. ё (Л СА:) оо ю оо ел Фиг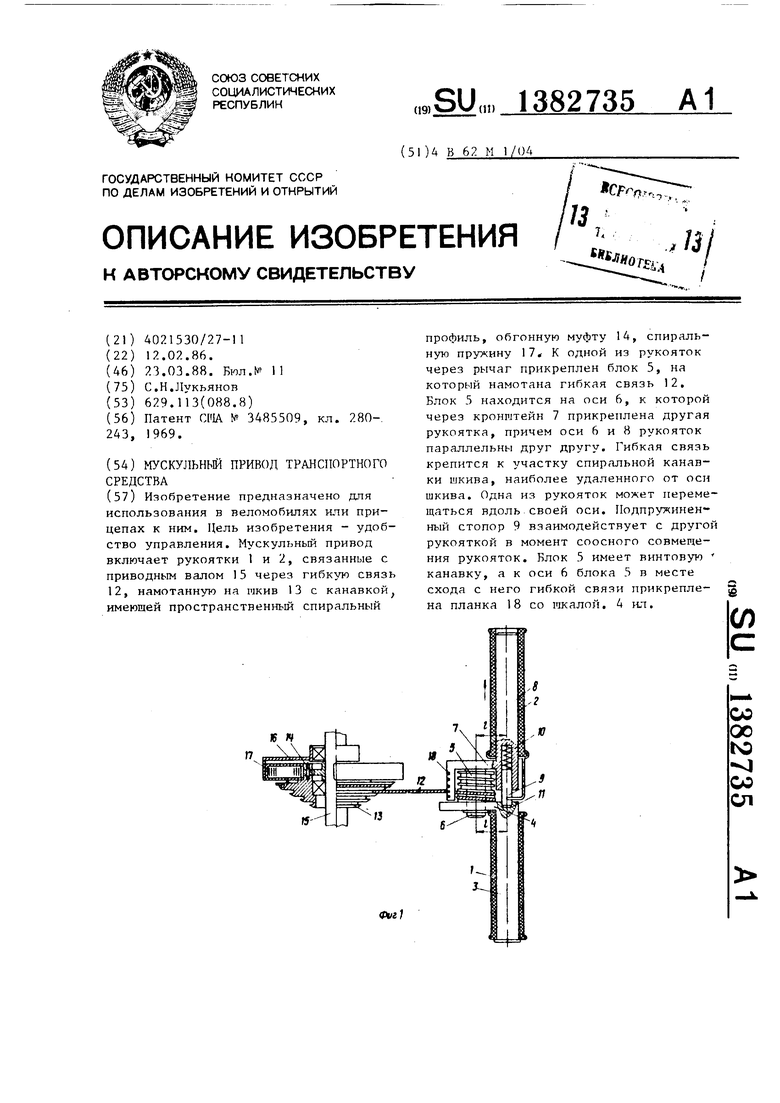
; г2
ч.
г Ю 20
(puz.J
ГЗ/
Фиг.
| Патент CHIA № 3485509, кл | |||
| СПОСОБ ПОЛУЧЕНИЯ ЧИСТОГО ГЛИНОЗЕМА И ЕГО СОЛЕЙ ИЗ СИЛИКАТОВ ГЛИНОЗЕМА, ПРОСТЫХ ГЛИН И. Т.П. | 1915 |
|
SU280A1 |
| Вагонетка для кабельной висячей дороги, переносной радиально вокруг центральной опоры | 1920 |
|
SU243A1 |
