(21)4156048/27-1I
(22)15.10.86
(46) 23.03.88. Бюл. № 11
(71)Центральное конструкторское бюро Министерства речного флота РСФСР в г. Горьком
(72)Э.П. Арустамов и В.А. Волков (53) 629. 12.015 (088.8)
(56) Авторское свидетельство СССР № 738934, кл. В 63 В 21/00, 1978.
(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ШВАРТОВКИ И ПЕРЕМЕЩЕНИЯ СУДОВ ВДОЛЬ .ПА
(57) Изобретение относится к судостроению, в частности к устройствам для автоматической швартовки и перемещения судов вдоль причала. Цель изобретения - повысить надежность и расширить технологические возмож
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической швартовки и перемещения судов вдоль причала | 1978 |
|
SU738934A1 |
| Устройство для автоматической швартовки и перемещения судна вдоль причала | 1986 |
|
SU1384466A1 |
| Устройство для швартовки и протяжки судов вдоль причала | 1973 |
|
SU600020A1 |
| ЛЕНГИПРОРЕЧТРАНС) | 1965 |
|
SU171286A1 |
| Комплекс для разгрузки судов | 1982 |
|
SU1079537A1 |
| Устройство для швартовки судна к причалу | 1979 |
|
SU870242A1 |
| БЕРЕГОВОЙ ШВАРТОВНЫЙ КОМПЛЕКС, БЕРЕГОВОЙ ОПОРНЫЙ ШВАРТОВНЫЙ МОДУЛЬ (ВАРИАНТЫ), УНИВЕРСАЛЬНАЯ МАГНИТНАЯ ЗАХВАТНАЯ СЕКЦИЯ (ВАРИАНТЫ), МАГНИТНАЯ ЯЧЕЙКА | 2024 |
|
RU2834110C1 |
| ШВАРТОВНОЕ УСТРОЙСТВО ДЛЯ СУДОВ | 1992 |
|
RU2029822C1 |
| ШВАРТОВНЫЙ ЗАХВАТНЫЙ МОДУЛЬ (варианты) | 2023 |
|
RU2808875C1 |
| Захватное устройство для швартовки и перемещения судна вдоль причала | 1984 |
|
SU1237549A1 |
29
(Л
со
СХ)
ьо
00
оо
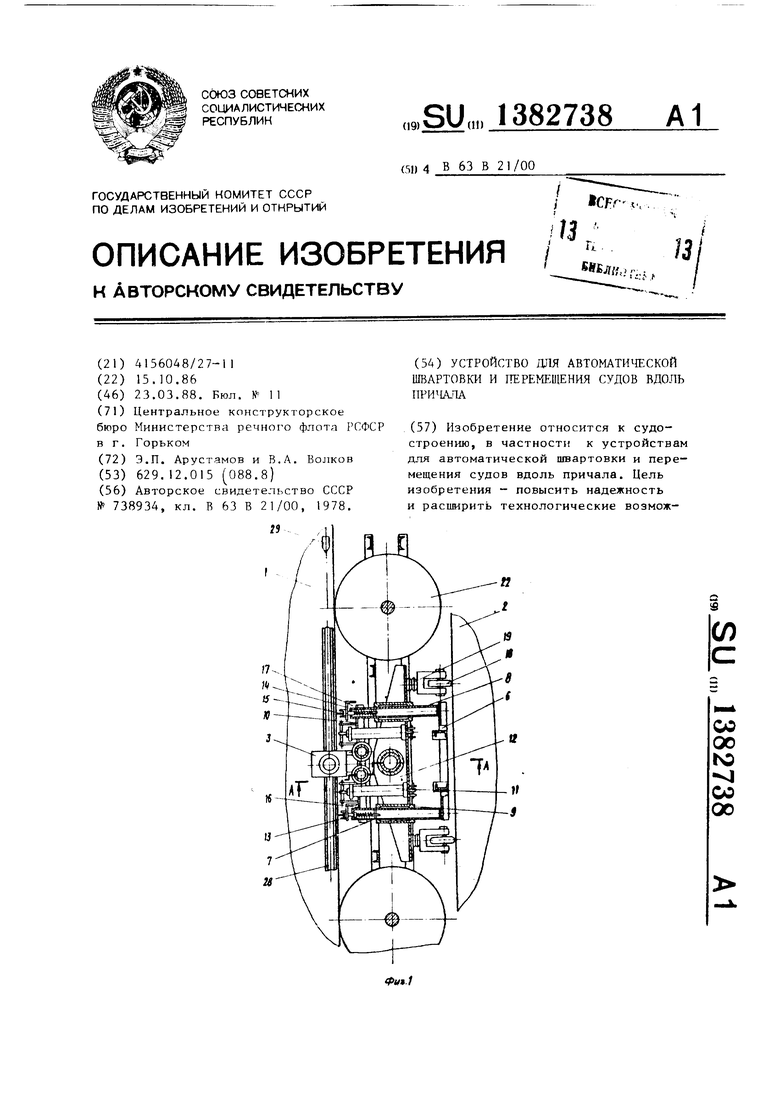
ности путем увеличения зоны сраба- 1Ъ1вания автоматического захвата. Устройство перемещения судна 1 вдоль причала 2 состоит из захвата 3 и привода, смонтированных на каретке 6 скалок 7 и 8, установленных в направ- ляюощх 9, и соединенных тягой 10, к которой прикреплены гидроцилиндры 11, соединенные с подвеской 12. На cKajmax 7 и 8 установлены датчики
1
Изобретение относится к судостроению, в частности к устройствам для автоматической швартовки и перемещения судов вдоль причала.
Цель изобретения - повышение надежности и расошрение технологических возможностей путем увеличения зоны срабатывания автоматического захвата.
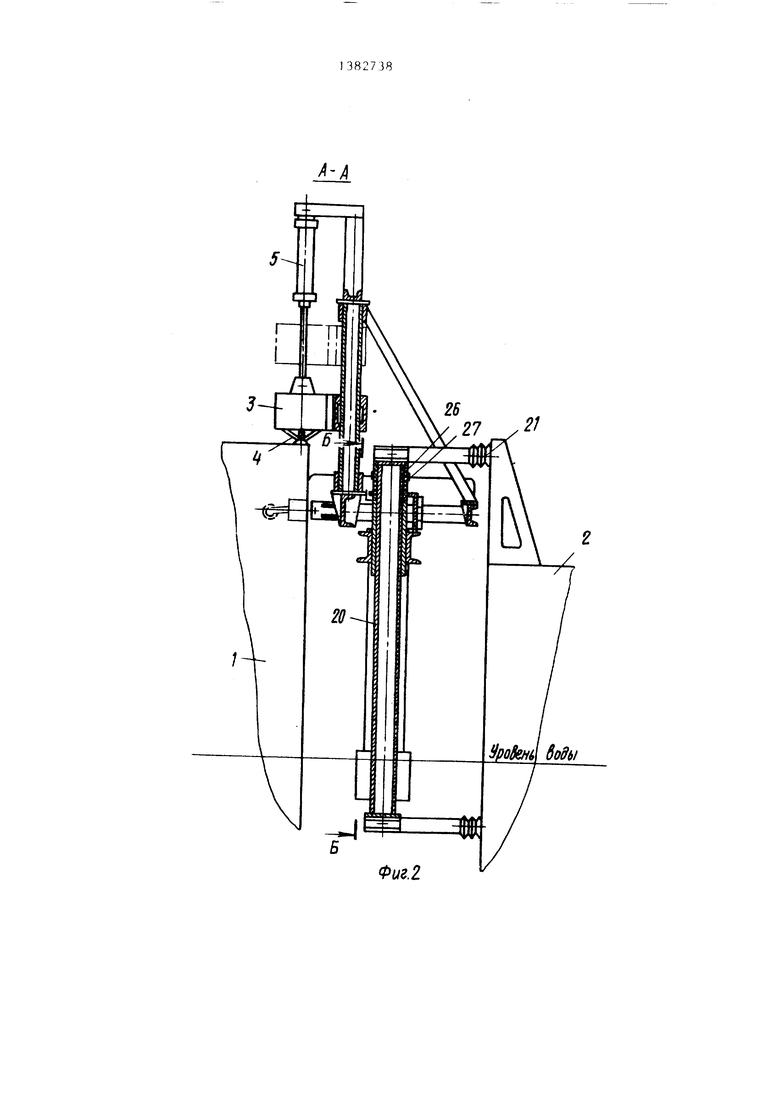
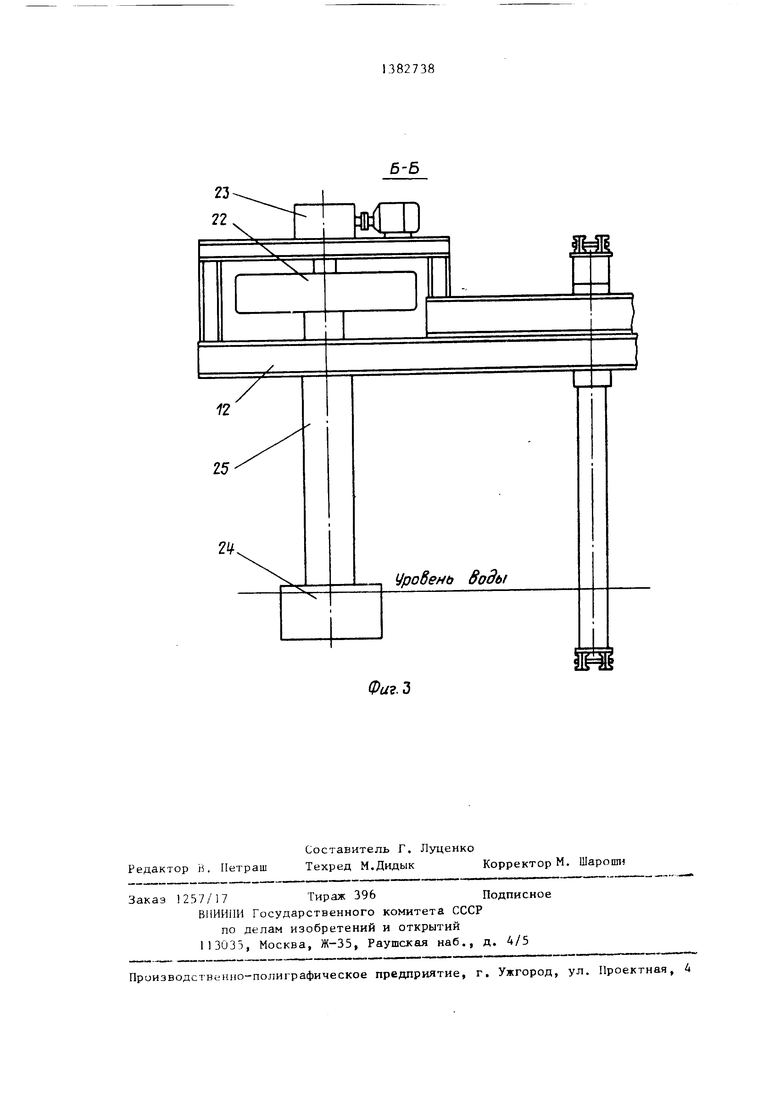
На фиг. 1 показано устройство вид сверху, разрез; на фиг. 2 - разрез А-Л на фиг. 1; на фиг. 3 - разрез Б-В на фиг. 2.
Устройство для автоматической ишартовки и перемещения судна 1 вдол причала 2 состоит из захвата 3 с захватными органами 4 и приводом 5, смонтированных на каретке 6 скалок 7 и 8, установленных в направляющих 9, соединенных между собой тягой 10 к которой прикреплены гидроцилиндры 1 1. Второй конец гидроцилиндров соединен с подвеской 12. На скалках 7 и 8 установлены соответственно датчики 13 и 14, KOHij i которых выполнены в виде гуськовых роликов 15. Датчик 13 взаимодействует с конечным выключателем 16, а датчик 14 взаимодействует с конечным выключателем
18,подпружиненными пружинами 19, и смонтирована на направляющей 20, соединенной с причалом 2 пружинами 21. На подвеске 12 установлены пневм баллоны 22, оснащенные реверсивным приводом 23. Подвеска 12 соединена
с понтонами 24 штангами 25. В верхней части подвески упановлен буфер- отбойник 26 с 27.
13 и 14, концы которых выполнены в виде гуськовых роликов 15. Датчик 13 взаимодействует с выключателем 16, а датчик 14 - с выключателем 17. Подвеска 12 снабжена роликами 18, подпружиненными пружинами 19, и на ней установлены пневмобаллоны 22. На палубе судна 1 установлен рельс 28, на котором закреплен автоспуск 29. 3 ил. .
На палубе судна 1 установле) рельс 28, на котором закреплен автоспуск 29.
Устройство работает следующим образом.
Судно 1, подходя к причалу 2, прикасается к датчику 13 в виде гусь- кового ролика 15, утапливая его в
0 скалку 7. При этом срабатывает конечный выключатель 16. Одновременно или вслед за-этим утапливается датчик 14 в скалку 8 и срабатывает конечный выключатель 17. При срабатывании коi; нечных выключателей 16 и 17 захват 3 от привода 5 опускается на рельс 28, установленный на судне 1, и от давления захвата 3 на рельс 28 срабатывает захватный орган 4.
20 Под действием навала судна 1
скалки 7 и 8 перемещаются в направляющих 9 и через тягу 10 воздействуют на гидроцилиндры 11, которые в этот момент выполняют функцию амор25 тизатороВо Судно 1 либо при1шмает промежуточное положение между начальным и конечным, либо касается пневмобал- лонов 22. В этих случаях через заданный промежуток времени включают30 ся гидроцилиндры 11, обеспечивая плотное прижатие судна 1 к пневмо- баллонам 22.
Воздействие бортовой качки судна I компенсируется работой пружин 19 JC, и 21, а вертикальное перемещение
судна 1 на волне компенсируется перемещением каретки 6 с подвеской 12 и закрепленным на каретке захвагом 3 по направляющей 20. Разворот каретки 6 под действием сил, направленгалх
вдоль ДП судна, компенсируют пружины 19 роликов 18,
Пневмобаллон) 22, вращаясь поц действием поступательного движения судна , вращают привод 23, осушеств- .шя торможение судна с(гачада в режиме мультипликации, а затем электродинамического торможения. Если необходимо осуществить перемещения судна 1 вдоль причала 2 н ту или другую сторону, включается реверсивный привод 23 вращения пневмобаллонов в соответствующую сторону.
При загрузке судно 1 изменяет осадку и захват 3, опускаясь вместе с судном, через каретку 6 и штанги 25 воздействует на понтоны 24, утапливая их в воду.
После загрузки судна и протяжки его вдоль причала автоспуск 29 действует на захват 3 и захватный орга
4открывается. Под воздействием выталкивающей сил1з1 понтон 24 возвращает соединенную с ним каретку 6 вверх, в исходное положение, а гусь- ковые ролики 15 выходят из зацепления с судном, возвращая датчики 13 и - тоже в исходное положение, освобождая конечные выключатели 16 и 17, тем самым подавая команды; приводу
5на пoд ь м saxBaia 3 в верхнее (исходное) положение, Г идронилиндрам
1 на выдвижение карегки 6. Скорость подъема подвескн 12 регулируется обжатием буфера-отбойника 26 с помощью хомута 27.
0
5
Формула изобретения
Устройство для автоматической швартовки и перемещения судов вдоль причала, содержащее амортизаторы с пневмобаллонами, привод и узел захвата и протяжки с пружинными элементами и автоспуском, включающий каретку,установленную Б направляющих,смонтированных на причале, и захватный орган, установленный на каретке и взаимодействующий с привальным брусом судна, отличающее ся тем, что, с целью повышения надежности и расширения технологических возможностей путем увеличения зоны срабатывания автоматического захвата, оно снабжено подвеской с ро.пиками, а пневмобаллоны амортизаторов - реверсивными приводами, каретка выполнена с установленными в направляющих с возможностью перемещения в них скалками, соединенными между собой тягой, 5 которая снабжена гидроцилиндрами,
при этом скалки выполнены с расположенными на их концах, обращенных к судну, датчиками, сопряженными с конечными выключателями, а другими концами скалки присоединены к подвес0
0
5
ке, причем последняя выполнена с направляющей, закрепленной на причале дJИ ее линейного возвратно-поступательного перемещения, и с понтонами, соединенными с подвеской штангами, при этом верхняя часть подвески снабжена буферным отбойником, а захватный opraii посредством кронштейна соединен с одним из понтонов.
27 /
Фиг.2
23 22
Уровень 8оды
Фа.Ъ
