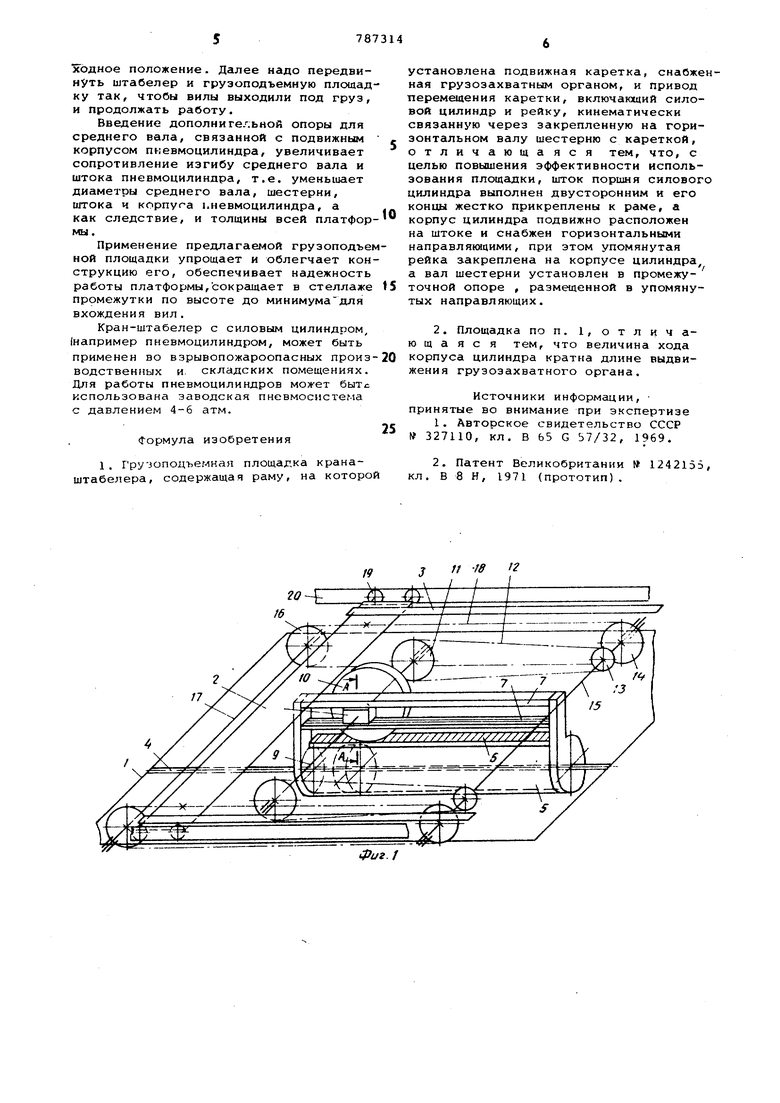
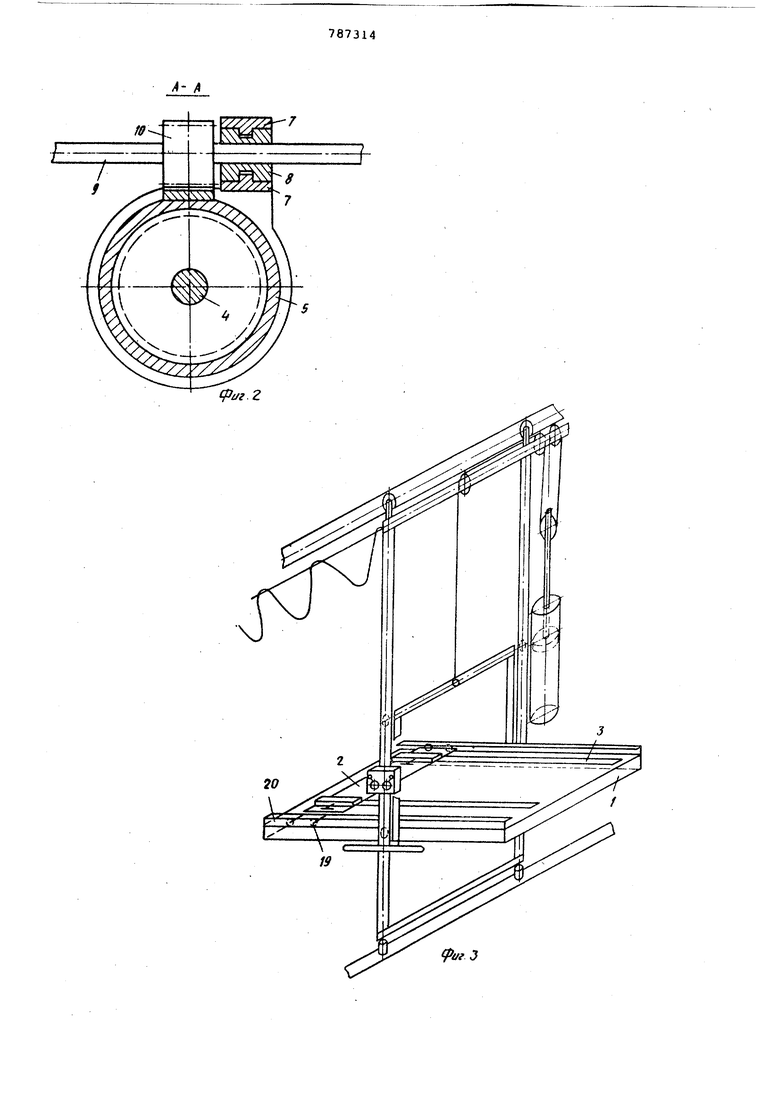
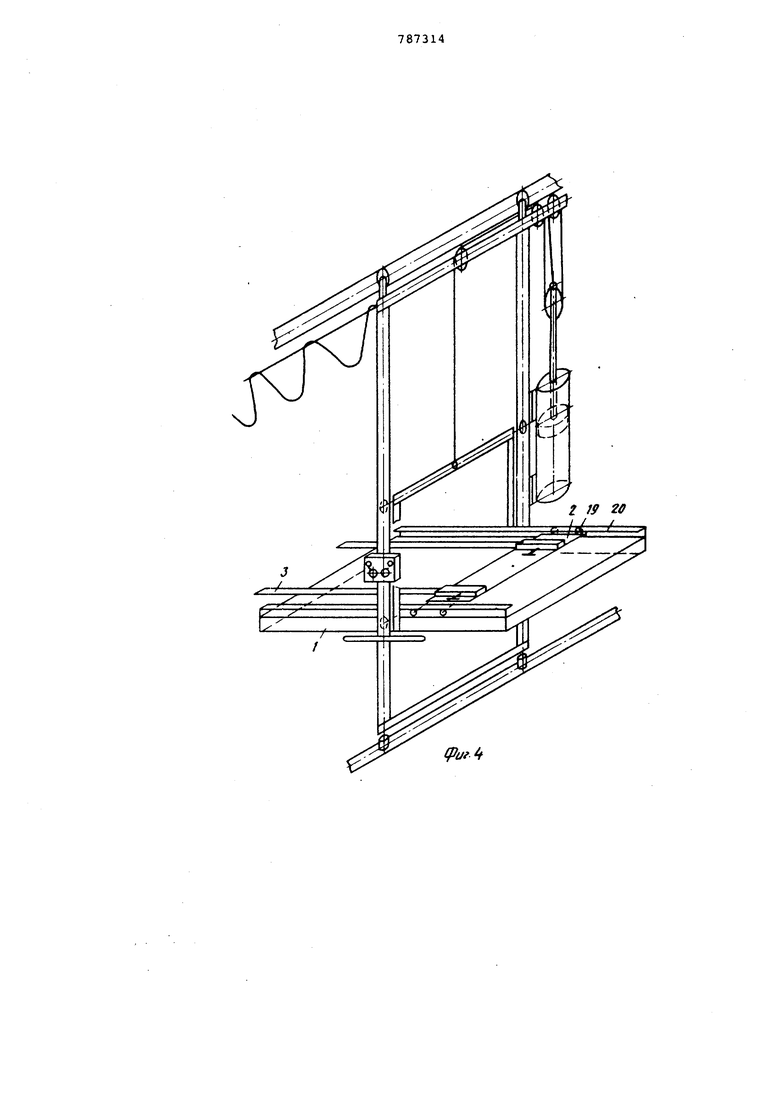
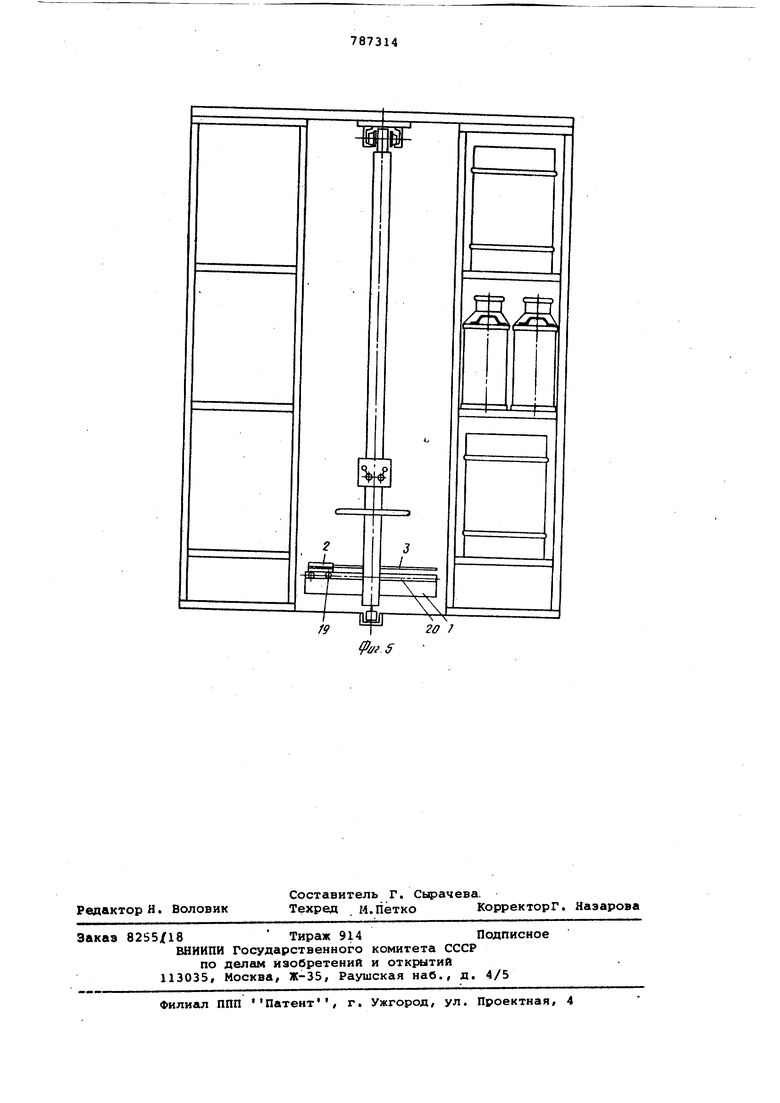
Изобретение относится к оборудованию складов, в частности к грузоподъе ным площадкам кранов-штабелеров, и мо жет быть использовано в различных отраслях промышленности, преимущественн для работы во взрывоопасных помещения Известна грузоподъемная площадка, содержащая раму, на которой установлена подвижная каретка, снабженная грузозахватным органом, и привод перемещения каретки 1. Недостатком известной площадки является то, что оиа не может быть использована во взрывоопасных и пожароопасных помещениях, поскольку в качестве привода использован электродвигатель . Известна грузоподъемная площадка, содержащая раму, на которой установлена подвижная каретка, снабженная грузозахватным органом, и привод перемещения каретки, включающий силовой цилиндр и рейку, кинематически связанную через закрепленную на горизонтальном валу шестерню с кареткой Известную площадку можно использовать во взрывоопасных и пожароопасных помещениях, однако она обладает сложной конструкцией и увеличенной высотой , что снижает эффективность использования площадки. Цель изобретения - повышение эффективности использования площадки. Цель достигается тем, что шток поршня силового цилиндра выполнен двусторонним и его концы жестко прикреплены к раме, а корпус цилиндра подвижно расположен на штоке и снабжен горизонтальными направляквдимн, при этом упомянутая рейка закреплена на корпусе цилиндра, а вал шестерни установлен в промежуточной опоре, размещенной в упомянутых направляющих. При этом величина хода корпуса цилиндра кратна длине выдвижения грузозахватного органа. На фиг. 1 изображена кинематическая схема грузоподъемной площадки; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - штабелер с вилами, направленными вправо (в исходном положении), общий вид; на фиг. 4 - штабелер с вилами, направленными влево (сдвинутыми от исходного положения), общий вид; на фиг. 5 - положение штабелера в стеллажах. Грузоподъемная площадка -- порЖит горизонтальную раму 1, на котороп установлены каретки 2 с грузозахватными органами, например с вилами 3. Вилы 3 могут переставляться в пазах (не показаны) каретки влево или вправо, а концы вил 3 стопорится в пазах фиксаторами (не показаны).Приводом каретки служит силовой цилиндр, например пневмоцилиндр, шток 4 которого концами закреплен на раме 1. На подвижном корпусе 5 пневмоцилиндра .расположена зубчатая рейка 6, служащая для кинематической связи пневмоцилиндра с кареткой 2. Корпус 5 пневмоцилиндра снабжен направляющими 7, между которыми заключена дополнительная опора, выполненная в виде ползуна 8 с отверстием для среднего вала 9, на котором жестко закреплена шестерня 10, входящая в зацепление с рейкой б. Кинематическая связь пневмоцилиндра с кареткой 2 осуществляется посредством рейки 6, шестерки 10, установле ной на валу 9, звездочек 11 на этом же валу, цепи 12, звездочек 13 и 14 крайнего правого вала 15, звездочек 1 крайнего левого вала 17. Цепи 18, надетые на звездочки 14 и 16, жестко скреплены с кареткой 2, несущей на се бе вилы 3. Каретка 2 имеет ролики 19 для передвижения в направляющих 20, Пневмоцилиндр расчитан так, что ми нимальное усилие, которое он создает Под действием сжатого воздуха в 4 атм от заводской пневмосети,обеспечивает грузоподъемность штабелера. Максимальный ход корпуса пневмоцилиндра невелик, поэтому для наибольше го выдвижения вил требуется увеличени передаточного числа, которое осуществляется за счет зубчато-реечной и цепных передач. При помощи этого пере даточного числа можно осуществить желаемую кратность видвижения вил от хода подвижного корпуса пневмоцилиндр Кран-штабелер работает следующим образом. При взятии груза из стеллажа кранштабелер с грузоподъемной площадкой передвигается к определенной полке так, чтобы вилы выходили под груз. Ес ли груз надо взять, например, из парового сГтеллажа/то каретка 2 должна находиться в левом исходном положени В этом случае пнбвмокран (не показан площадки включается на передвижение каретки 2 с вилами 3 вправо. При пос туплении сжатого воздуха корпус 5 пневмоцилиндра начинает передвигатьс так как шток 4 концами закреплен раме 1. Рейкаб, закрепленная на корпу се 5, вращает шестерню 10 с валом 9, далее вращение передается на звездоч ки 11 вала 9, цепи 12, звездочки 13 и 14 вала 15, звездочки 16 вала 17 и цепи 18, скрепленные скареткой 2, которые передают движение каретке 2 вилами 3 из исходного положения впра во. После полного выдвижения вил 3 п груз включается пневмокран на подъем грузоподъемной площадки, чтобы приподнять груз над полкой, потом переключить пневмокран платформы на передвижение каретки с вилами влево до исходного положения. Затем кран-штабелер передвигается к месту разгрузки, и груз устанавливается на подставку видвижением каретки с вилами 3. Если после этого требуется установить груз в левый стеллаж, то надо переставить вилы в пазах каретки влево и правые концы вил 3 застопорить в пазах каретки, затем включением пневмокрана установить каретку в правое исходное положение, при этом вилы 3 будут направлены влево. Переключением пневмокрана передвигают каретку с вилами влево под груз, приподнимают груз над полкой, переключают пневмокран и передвигают каретку с вилами в правое исходное положение. Груз будет стоять на вилах в ытабелере. Затем передвигают штабелер вручную до нужной полки Б левом стеллаже и устанавливают гру.з .Установка производится в обратном порядке. В случае наезда вил площадки на стеллаж или на груз, может произойти разрыв кинематическЬй связи между рейкой 6 и шестерней 10, т.е. выход их из зацепления. Для предотвращения такого аварийного состояния, независимо при наезде на правый или левый стеллаж или груз, введена дополнительная опора для вала 9, связанная с корпусом 5 пневмоцилиндра, которая выполнена в виде ползуна 8 с отверстием для вала 9, а вкладыш заключен между направляющими 7, закрепленными на корпусе 3 пневмоцилиндра. Выход из зацепления шестерни с рейкой при наезде на препятствие позволяет корпусу пневмоцилиндра под давлением сжатого воздуха переместиться из исходного в крайнее положение (перед началом выдвижения вил корпус 5 пневмоцилиндра и каретка 2 с вилами 3 находятся в исходном положении), при этом не приводя в, движение каретку с вилами. При остановке корпуса в крайнем полржении шестерня 10 с рейкой 6 входят в зацепление и кинематическая связь между ними восстанавливается.Возвратить корпус пневмоцилиндра с рейкой из крайнего в исходное положение в таком случае без повторного разрыва кинематической связи невозможно,так как каретка с вилами в момент наезда на препятствие стоит почти в исходном положении, Для продолжения работы после наезда на препятствие надо пневмокран пневмоцилиндра площадки переключить на обратное направление (подать сжатый воздух в другую полость пневмоцилиндра) , тогда корпус пневмоцилиндра передвинется в исходное положение до упора, одновременно и каретка с вилами снова перейдут в крайнее исходное положение. Далее надо передвинуть штабелер и грузоподъемную площад ку так, чтобы внлы выходили под груз, и продолжать работу. Введение дополнительной опоры для среднего вала, связанной с подвижным корпусом пкевмоцилиндра, увеличивает сопротивление изгибу среднего вала и штока пневмоцилиндра, т.е. уменьшает диаметры среднего вала, шестерни, иггока и корпуга ьневмоцилиндра, а как следствие, и толщины всей платфор мы. Применение предлагаемой грузоподъе ной площадки упрощает и облегчает кон струкцию его, обеспечивает надежность работы платформы,сокращает в стеллаже промежутки по высоте до минимума для вхождения вил. Кран-штабелер с силовым цилиндром, (например пневмоцилиндром, может быть применен во взрывопожароопасных проиэ водственных и. складских помещениях. Для работы пневмоцилиндров может бытс использована заводская пневмосисгема с давлением 4-6 атм. Формула изобретения 1 . Грузоподъемная площадка кранаштабелера, содержащая раму, на которо установлена подвижная каретка, снабженная грузозахватным органом, и привод перемещения каретки, включающий силовой цилиндр и рейку, кинематически связанную через закрепленную на горизонтальном валу шестерню с кареткой, отличающаяся тем, что, с целью повышения эффективности использования Площадки, шток поршня силового цилиндра выполнен двусторонним и его концы жестко прикреплены к раме, а корпус цилиндра подвижно расположен на штоке и снабжен горизонтальными направляющими, при этом упомянутая рейка закреплена на корпусе цилиндра, а вал шестерни установлен в промежуточной опоре , размещенной в упомянутых направляющих. 2. Площадка по п. 1, отличающаяся тем, что величина хода корпуса цилиндра кратна длине выдвижения грузозахватного органа. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 327110, кл. В 65 G 57/32, 1969. 2.Патент Великобритании 1242155, кл. В 8 Н, 1971 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемная площадка крана-штабелера | 1979 |
|
SU918219A1 |
| Грузоподъемная площадка крана-штабелера | 1985 |
|
SU1283199A1 |
| Грузозахватное устройство стеллажного крана-штабелера | 1990 |
|
SU1773813A1 |
| Грузоподъемная площадка крана-штабелера | 1986 |
|
SU1384503A2 |
| Грузоподъемная площадка крана-штабелера | 1987 |
|
SU1530535A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Грузозахватное устройство стеллажного крана-штабелера | 1990 |
|
SU1752724A1 |
| Грузоподъемная площадка стеллажного крана-штабелера | 1984 |
|
SU1174349A1 |
| КРАН-ШТАБЕЛЕР | 1968 |
|
SU426938A1 |
| Грузозахватное устройство крана-штабелера | 1986 |
|
SU1382767A1 |
Фиг.
