25 21
А - А
12
73
rt
(Л
00 00
ю
оо ел
И;юбретение транспортным и
к подъеммо- устройствам, в
относится складским
частности к устройствам, предназначенным для доставки и нсрегрузки штучных грузов и грузов в таре на приемные столы рабочих мест механообрабатывающих цехов и быть использовапс; в различных областях промыи1ленн()сти.
lie. ibH) изобретения является снижение : нергоемкосги за счет умень 11ения ве)1И- ка.чьно 11е)ем1мпаем()11 массы.
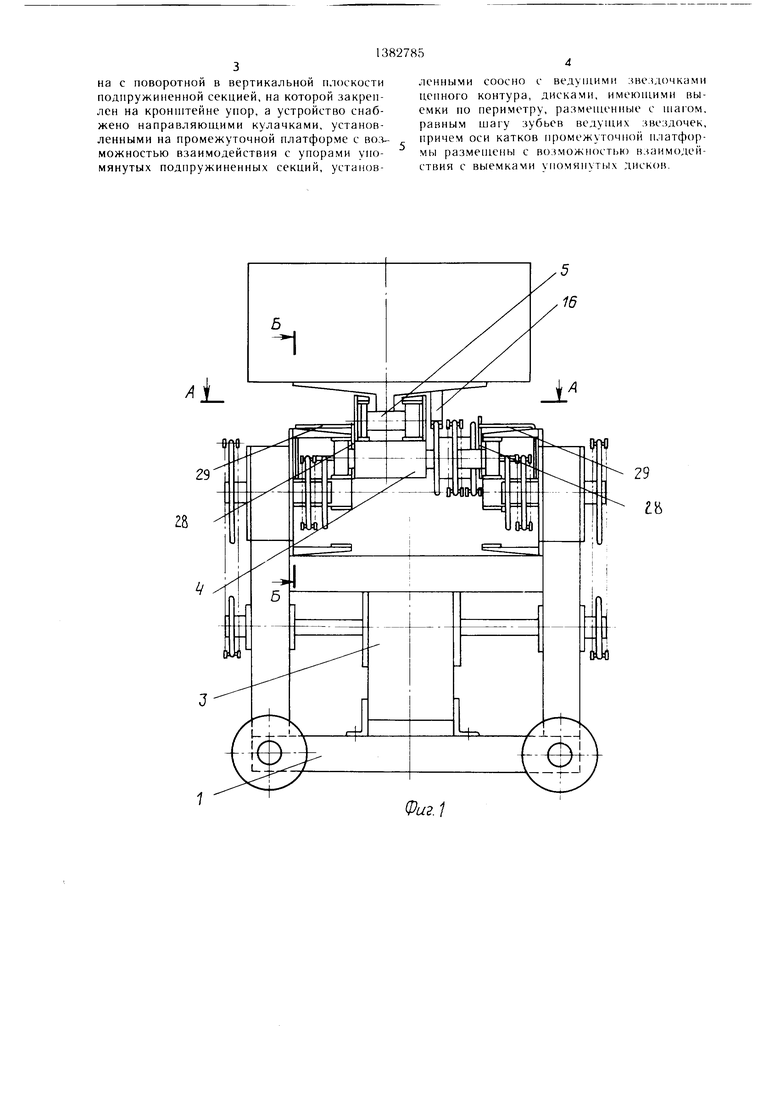
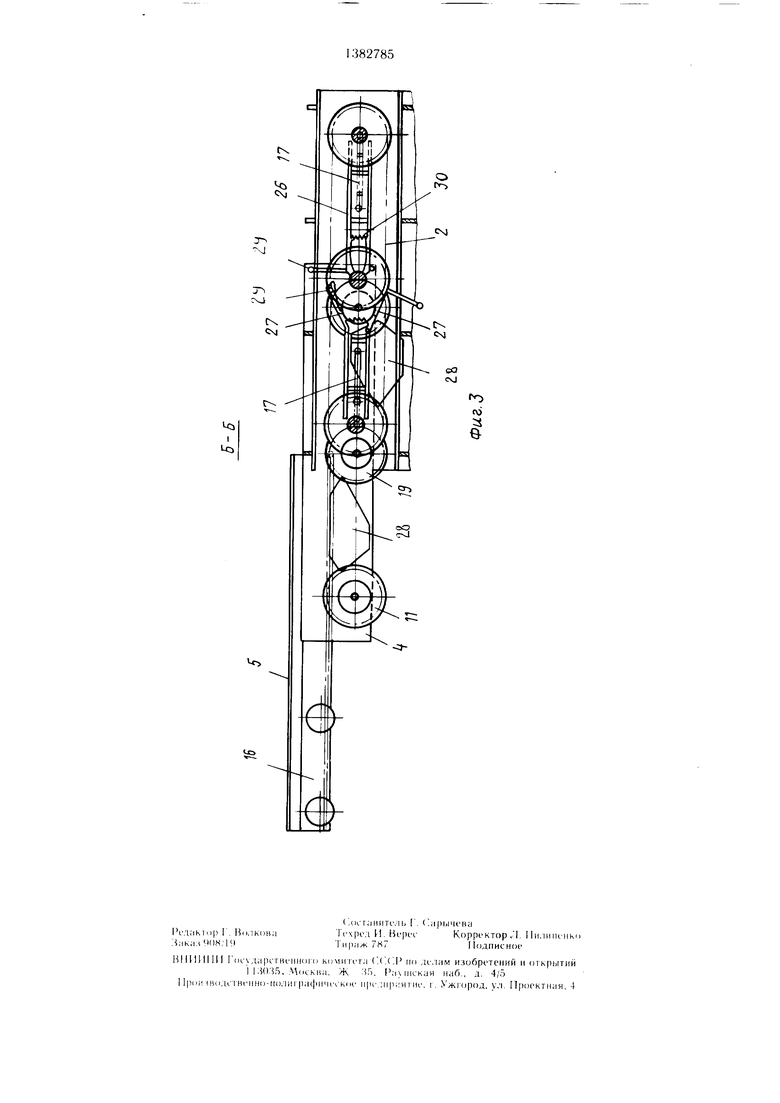
На фиг. I дано предлагаемое устройство, вид спереди; tia . 2 разрез Л Л па фп|. 1; fia ifjni. 3 разрез Ь Ь па фиг. I.
Уст|1оП1, гво иключаег в себя самоходное осповапие 1, приводную utMii. 2, работакь iuyK) от привода Л, пень передает движение промежуточно п.:|;п((;и)рме 4 и через систему звездочек усганов.ченной па пей грузопе- сушей пла1ф(1рме Г). Ог одпого привода осу- П1есгвляегся .телескопическое вы.авижепие платформ и ooi cTopoHi.i и их или опускание.
Для того в устройстве имеется ось- водило f). П1а пирно связанное с цепью 2 и с нромежу ro4Hoii n.iai формой 4, а ii самой нлагч|н)рме смон i ированы оси 7 и 8, па кою па(. ажепы с воз.можнос ) врапк ния дна блока из ipc (вездочек 9 14. Звездочки К) и 13 охвачены цепью 15. Звездочки И и 12 зацеп,К пы с цен1)К) Ifi, закреп.ЦЧ1 ной на грчзонеслчней пла-1 форме 5, а зие-.- дочки . и 14 входя в зацепление с отрезками цени 17, акре|1,1енн1 1ми па осшшанпи 1. На ось ииди,) Г) г нозм1)жнос 1Ы) Bjiann ния шикч сн Г,1(1К Hi дв X звездочек 18 и 19. Звездочка 19 к процессе перемеп1епия промежуточпой пла I ljiopMiji зацеп, 1ЯС Тся с отрезками IU4in 1 с замкпутой цс межугочп(111 пл; охваченньн це 23 25. Диски окружности с дочек 2(1 22. 1
а звездочка 18 зап1Ч1лена )К) I,), )аспо,1оженпой в npcj- 1()орме 4. Зне.5дочки 20 22, 1Ч1ар1ЧЦ)1 с дисками
,10
выпо,1пены с впадинами по niai OM. равным niaiy З1нм- ,ри с|)едпем или пижпем положении устройства в Э1Н впадины заходя г консольные конны осей 7 и 8 и води.по G. 11ромежуточпая n,. ia 1ч()орма nepeMcnui- ется по пап|и1В.1ЯК)|Цим 26 и 27 на шести катках, пасаж1Ч1пьгх па осях 7 и 8 и иодиле 6. В средпе11 часгп ус ( роист ва, где расположе- па звездочка 21, имеется разрыв в паправ- лякмце 2Г). В момен 1()П1зонтально1 о пере- меп1епия промежу гочной нлатфо)мы разр1)1в нерекр1 гг inaptinpno закрегкимшыми подпру- жипепными направ, 1Я1)П1ими 27. 11е)едоиус- капием n,in подьемом п, 1атфо )мы паправляю- 1цие подпимакпся в |)езу, 1ыате воздействия кулачков 28 n,iar4iopMbi 4 па упор 29 направляющей 27. Возвра нап|)авляю1цих осу- П1еств.;1яе гея п)ужипами 30.
Устройство рабогает следующим образом.
При включепии привода i но часовой
стрелке Ш ПЕ, 2 по редс TSOM водила ( неремешае нр1тц жу ||)чную платформу 4 в.. 1ево
5
5
5
в горизонтальной плоскости (фиг, 3), Оси 7 и 8 и водило 6 выходят из впадин дисков 23 25 и дальнейшей опорой для катков платформы служат направляющие 26 и 27.
При перемещении промежуточной платформы звездочка 9 получает вращение благодари зацеплению ее с неподвижным отрезком цепи 17, а вместе с пей получают вращение звездочки 10, 11 и 22, а через цепной замкнутый контур 15 звездочки 18, 13,
12, 14, 21 и 20. За ечет зацепления вращаемой звездочки 12 с не|Ц)движной ценью 16 грузонесушая платформа 5 получает телескопическое перемепк пие влево (фиг. 3). KOI да звездочка 9 п)и перемещении платформы 4 вьгходит из «аценления с одпи,м отрезком пепи 17, то дальнейптсе движение г рузонесунтей платформы осуществляется ,веЗ:И)чкой , которая входит в .зацеп.. 1е- пие с дру ИЧ отрезком цени 17.
Выдвижспие платформь: происходит до
0 тех пор, покак ось-водило fi пе западет во впадипу диска 25. В (}м случае при подходе ка1ка к звездочке 21 поднимается . le- вая на11)ав,:|яю1цая 27, в ре.зультате воздействия кулачков 28 на ynoj) 29 (фиг. 3). 11ри врапишии дисков 25 п 21 обе платформы опускаюкя и кладут i )уз на нриемпый стол, расположенный слева от устройс 1ва и имею- паз по оси. Г1.:|атформы опускаются че- )е 5 паз с юла до крайнего нижнего положения и при дал1)НеЙ1нем движении цени 2
Q обе платформы в онущеппом положении скла- дь ваются вп)аво, т.е. во,)врап1аклся в io|in- оптальпой п;|()скости до среднего нижнего исходного положения. 11од 1«)здействием мьц- паправляюп1ие 27 ходпое иоложеппе.
пружип iiO под ьем- впз15ран1ак)тся в ис0
5
0
5
При
враптении привода ||)(1тив часовой стрелки плат()к)рмы )Ь1двчган тся в онуптен- ном положении в.:1ево, поднимаются, снимают г()уз с njineMnoro стола, расположеннсло слева 01 устройства, и возвращаются в среднее верхнее положение. Из верхнего исход- пого по. южепия при врап1ении привода 3 против часовой стрелки платформы выдвигаются вправо и осуп1есгвляю1 укладку и об ьем аналог ично о|шсапному вын1е.
Формула изобретения
)узочное устройстве для нггучных | рузов, содержатцее осповапие с опо)ными паправляюпшми, имеюптими онираюншеся па пос.чедние пары катков промежуточную и грузо11есуп1,ие платформы и привод выдвижения 11. 1атформ, включаюпшй размен1ен- ный па осповании цепной контур с водилом, кииематически связанным с промежуточной платформой, отличающееся тем, что, с целью е 1ижепия ;1нергоемкости за счет уменьшения вертика,1ьпо перемещаемой массы, каждая опо)пая паг1равляюп1ая ()сноват1ия вьшолнена с поворотной в вертикальной плоскости подпружиненной секцией, на которой закреплен на кронп1тейне упор, а устройство снабжено направляющими кулачками, установленными на промежуточной платформе с BO;V- можностью взаимодействия с упорами упомянутых подпружиненных секций, установленными соосно с ведущими ()чками цепного контура, дисками, имеюп1,ими выемки по периметру, размещенные с тагом, равным щагу зубьев ведущих звездочек, причем оси катков Г1ромежуточ 1ой платформы размеп1ены с возможностью взаимодействия с выемками УПОМЯНУТЫХ дисков.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильное средство для раздачи кормов в животноводческих помещениях | 1988 |
|
SU1517868A1 |
| Транспортная система | 1986 |
|
SU1331687A1 |
| Многоопорное гусеничное транспортное средство | 1986 |
|
SU1373611A1 |
| Теплица И.И.Сташевского | 1990 |
|
SU1789126A1 |
| Транспортная система автоматизированной линии сборки | 1986 |
|
SU1495071A1 |
| Машина для посадки горшечной рассады | 1987 |
|
SU1501947A1 |
| Манипулятор | 1985 |
|
SU1268400A1 |
| Судовой подъемник | 1973 |
|
SU508437A1 |
| Устройство для выгрузки хлеба из форм | 1984 |
|
SU1227141A1 |
| Транспортная тележка автоматической линии | 1985 |
|
SU1414562A1 |
Изопретеииг относится к нод|,ем11о- транспортным и ск/1адским устройствам. Цель и:п)6ретснин снижение )1 осмко сти :uj счет у ич1ЬН1ения ноднимаемой массы. Устройство с() самоходное основание . на котором смонти)ована с воиможностью 1 ыдннжения и опускания промежуточная н.1ат((и)рма. На последней телескопически выдвигается грузонесущан платформа. От 11|М1в()да водилом 6 чере. приводную цепь 2 нерсметается промежуточная платфор.ма, и черен систему звездочек 9 14, насаженных на ее валах и води.че 6 и зацепленных с ненодвижпыми пенями основания и грузо- песушей н.:1атф()рмы, приводится в движение I рузонесун1ая платформа. В конце хода выд1 11жения платформы оси 7 и 8 и водило 6 3ana;iaioT и выемки дисков 23 и 24, спарен- пых со звездочками приводной непи 2, при дальнейшем вращении которы.х осушествля- сгся подьем Ио1И онускание обеих н.пат- (|)орм. ,} и;|. 
29
гь
Фи2.1
«о
I
LQ
Us
tr
V) 5J e
| Лнто)ско( | |||
| сви, | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
