t)
г- 13
т
11
0
i2
U(t)
y(t)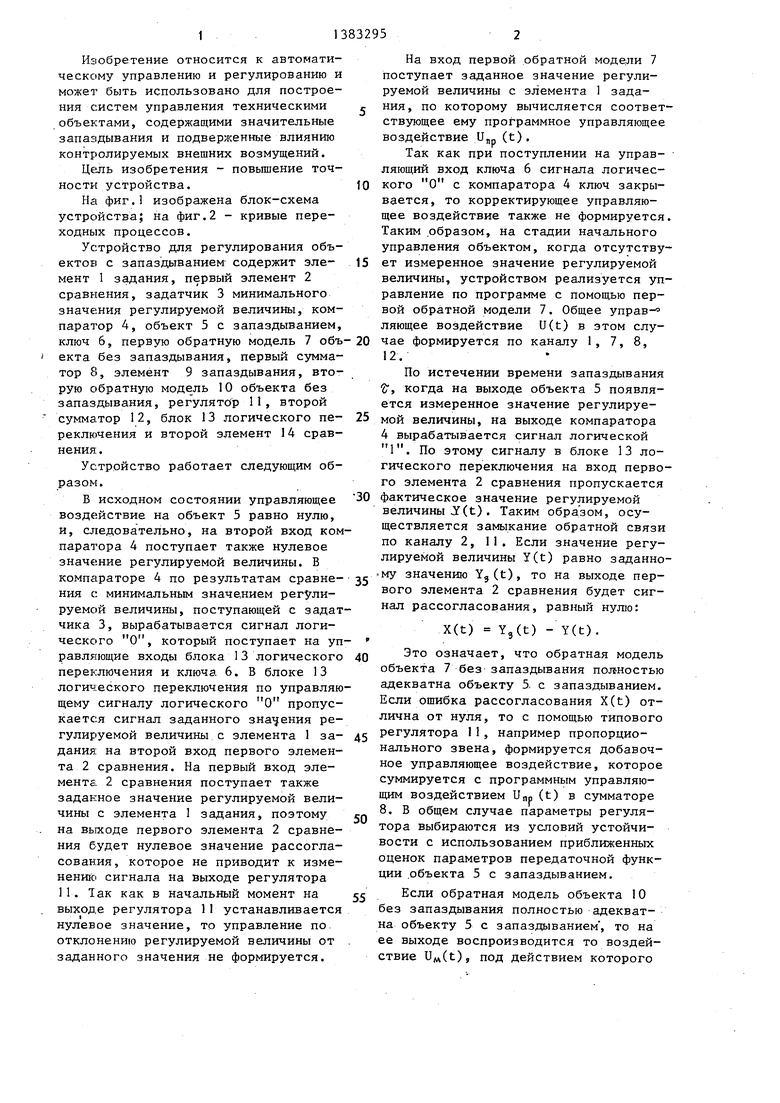
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Устройство для регулирования силовых параметров и рабочей подачи процесса резания | 1985 |
|
SU1270744A1 |
| КАСКАДНАЯ ДВУХКАНАЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ | 2006 |
|
RU2327196C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |
| Регулятор для объектов с запаздыванием | 1986 |
|
SU1361503A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Система автоматического регулирования толщины покрытия жести | 1987 |
|
SU1437417A2 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
Изобретение относится к автоматическому управлению и регулированию и может быть использовано для построения систем управления техническими объектами, содержащими значительные запаздывания и подверженные влиянию контролируемых внешних возмущений. Целью изобретения является повышение точности устройства. Устройство содержит элемент 1 задания, элементы 2, 14 сравнения, задатчик 3 минимального значения регулируемой величины, компаратор А, объект 5 с запаздыванием, ключ 6, обратные модели 7, 10 объекта без запаздывания, сумматоры 8, 12, элемент 9 запаздывания, регулятор 11, блок 13 логического пе - реключения. При рассогласовании параметров обратной модели 7 с параметра- р ми объекта 5 вводится корректирующее воздействие с помощью обратной модели 10 и регулятора 11, компенсирующее это рассогласование. 2 ил. S (Л
10
UH()
I
fpii.
Изобретение относится к автоматическому управлению и регулированию и может быть использовано для построения систем управления техническими объектами, содержащими значительные запаздывания и подверженные влиянию контролируемых внешних возмущений.
Ц€;ль изобретения - повьшение точности устройства.
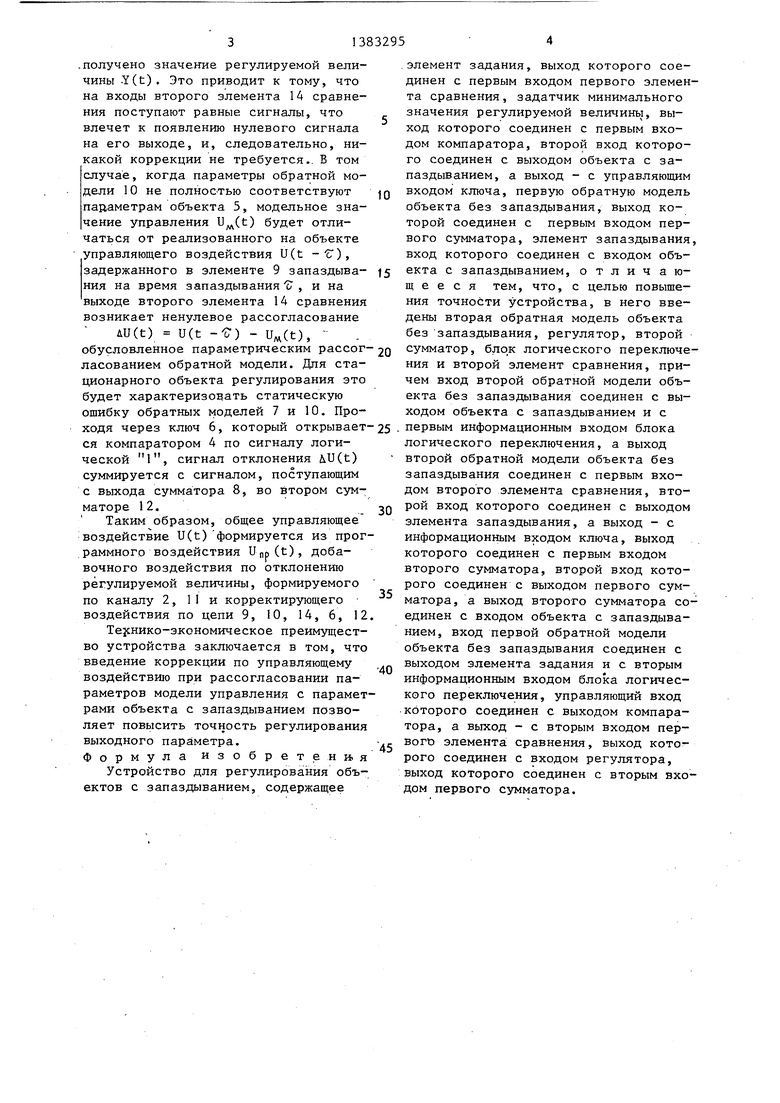
На фиг.1 изображена блок-схема устройства; на фиг.2 - кривые переходных процессов.
Устройство для регулирования объектов с запаздыванием содержит элемент 1 задания, первый элемент 2 сравнения, задатчик 3 минимального значения регулируемой величины, компаратор 4, объект 5 с запаздыванием, ключ 6, первую обратную модель 7 объ- екта без запаздывания, первый сумматор 8, элемент 9 запаздывания, вторую обратную модель 10 объекта без запаздывания, регулятор 11, второй сумматор 12, блок 13 логического переключения и второй элемент 14 сравнения .
Устройство работает следующим образом.
В исходном состоянии управляющее воздействие на объект 5 равно нулю, и, следовательно, на второй вход компаратора 4 поступает также нулевое значение регулируемой величины. В компараторе 4 по результатам сравнения с минимальным значе,нием регулируемой величины, поступающей с задат чика 3, вырабатывается сигнал логического О, который поступает на уп равляющие входы блока 13 логического переключения и ключа 6. В блоке 13 логического переключения по управляю щему сигналу логического О пропускается сигнал заданного значения ре- гулир уемой величины с элемента 1 задания на второй вход первого элемента 2 сравнения. На первый вход элемента 2 сравнения поступает также заданное значение регулируемой величины с элемента 1 задания, поэтому на выходе первого элемента 2 сравнения будет нулевое значение рассогласования , которое не приводит к изме- неник сигнала на выходе регулятора 11. Так как в начальный момент на выходе регулятора 11 устанавливается нулевое значение, то управление по. отклонению регулируемой величины от заданного значения не формируется.
На вход первой обратной модели 7 поступает заданное значение регулируемой величины с элемента 1 задания, по которому вычисляется соответствующее ему программное управляющее воздействие и„р (t).
Так как при поступлении на управляющий вход ключа 6 сигнала логичес0 кого О с компаратора 4 ключ закрывается, то корректирующее управляющее воздействие также не формируется. Таким образом, на стадии начального управления объектом, когда отсутству5 ет измеренное значение регулируемой величины, устройством реализуется управление по программе с помощью первой обратной модели 7. Общее управ- ляющее воздействие U(t) в этом слу0 чае формируется по каналу 1, 7, 8, 12.
По истечении времени запаздывания S , когда на выходе объекта 5 появляется измеренное значение регулируе5 мой величины, на выходе компаратора 4 вырабатывается сигнал логической 1. По этому сигналу в блоке 13 логического переключения на вход первого элемента 2 сравнения пропускается
0 фактическое значение регулируемой величины JCt). Таким образом, осуществляется замыкание обратной связи по каналу 2, II. Если значение регулируемой величины y(t) равно заданно- Му значению ), то на выходе первого элемента 2 сравнения будет сигнал рассогласования, равный нулю:
X(t) YjCt) - Y(t).
д Это означает, что обратная модель объекта 7 без запаздывания полностью адекватна объекту 5, с запаздыванием. Если ошибка рассогласования X(t) отлична от нуля, то с помощью типового
с регулятора 11, например пропорционального звена, формируется добавочное управляющее воздействие, которое суммируется с программным управляющим воздействием Unp (t) в сумматоре 8. В общем случае параметры регулятора выбираются из условий устойчивости с использованием приближенных оценок параметров передаточной функции .объекта 5 с запаздыванием.
Если обратная модель объекта 10 без запаздывания полностью адекватна объекту 5 с запаздыванием , то на ее выходе воспроизводится то воздействие U(t), под действием которого
получено значение регулируемой величины -Y(t). Это приводит к тому, что на входы второго элемента 14 сравнения поступают равные сигналы, что влечет к появлению нулевого сигнала на его выходе, и, следовательно, никакой коррекции не требуется.. В том случае, когда параметры обратной модели 10 не полностью соответствуют паваметрам объекта 5, модельное значение управления U(t) будет отличаться от реализованного на объекте управляющего воздействия U(t -€), задержанного в элементе 9 запаздыва- ния на время запаздывания , и на выходе второго элемента 14 сравнения возникает ненулевое рассогласование
AU(t) U(t - 0) - U(t), - обусловленное параметрическим рассог ласованием обратной модели. Для стационарного объекта регулирования это будет характеризовать статическую ошибку обратных моделей 7 и 10. Проходя через ключ 6, который открывает ся компаратором 4 по сигналу логической 1, сигнал отклонения i.U(t) суммируется с сигналом, поступающим с выхода сумматора 8, во втором сумматоре 12...
Таким образом, общее управляющее воздействие U(t) формируется из программного воздействия Unp(t), добавочного воздействия по отклонению регулируемой величины, формируемого по каналу 2, 1I и корректирующего воздействия по цепи 9, 10, 14, 6, 12
TejcHHKO-экономическое преимущество устройства заключается в том, что введение коррекции по управляющему воздействию при рассогласовании параметров модели управления с параметрами объекта с запаздыванием позволяет повысить точность регулирования выходного параметра.
Формула изобретения
Устройство для регулирования объектов с запаздыванием, содержащее
д 5
Q 5 - 0
.с
40
.элемент задания, выход которого соединен с первым входом первого элемента сравнения, задатчик минимального значения регулируемой величины, выход которого соединен с первым входом компаратора, второй вход которого соединен с выходом объекта с запаздыванием, а выход - с управляющим входом ключа, первую обратную модель объекта без запаздывания, выход которой соединен с первым входом первого сумматора, элемент запаздывания, вход которого соединен с входом объекта с запаздыванием, о т л и ч а ю- щ е е с я тем, что, с целью повышения точности устройства, в него введены вторая обратная модель объекта без запаздывания, регулятор, второй сумматор, логического переключения и второй элемент сравнения, причем вход второй обратной модели объекта без запаздывания соединен с выходом объекта с запаздыванием и с первым информационным входом блока логического переключения, а выход второй обратной модели объекта без запаздывания соединен с первым входом второго элемента сравнения, второй вход которого соединен с выходом элемента запаздывания, а выход - с информационным входом ключа, выход которого соединен с первым входом второго сумматора, второй вход которого соединен с выходом первого сумматора, а выход второго сумматора соединен с входом объекта с запаздыванием, вход первой обратной модели объекта без запаздывания соединен с выходом элемента задания н с вторым информационным входом блока логического переключения, управляющий вход которого соединен с выходом компаратора, а выход - с вторым входом пер- вог1э элемента сравнения, выход которого соединен с входом регулятора, выход которого соединен с вторым входом первого сумматора.
Ткп
| Цыпкин Я.З | |||
| Основы теории автоматических систем | |||
| - М.: Наука, 1977, с | |||
| Способ приготовления хлебного вина | 1925 |
|
SU424A1 |
| Турецкий X | |||
| Анализ и синтез систем управления с запаздыванием. | |||
| - М.: Машиностроение, 1974, с | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
