К
О
ч ел
Изобретение относится к машиностроению, в частности к телескопическим грузо- захватам подъемников, и может найти применение при-транспортировании и складировании грузов в таре.
Цель изобретения - повышение точности позиционирования.
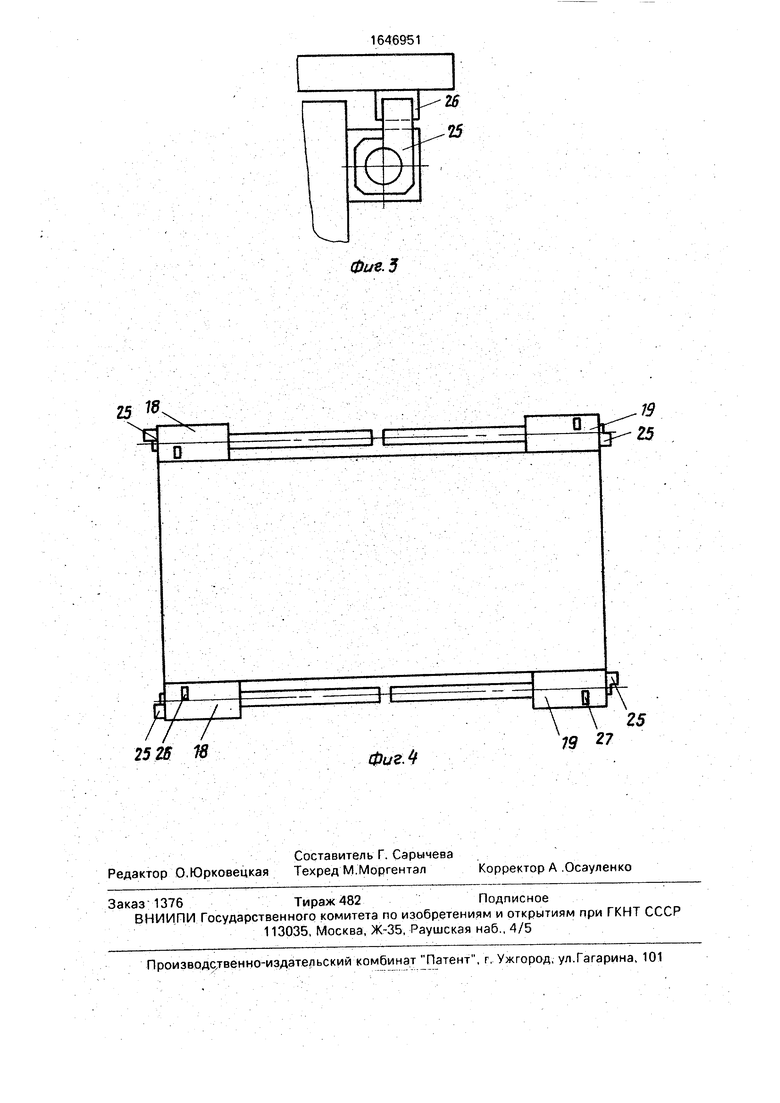
На фиг. 1 изображен груаозахват, общий вид; на фиг,2 - ограничители перемещения грузозахвата в обе стороны; на фиг.З - обой- ма ограничителя перемещения, вид сбоку; на фиг.4 - грузозахват, вид сверху.
Грузозахват содержит установленные с возможностью плоскопарэллельного перемещения друг относительно друга ос- нование 1, промежуточную платформу 2 и верхнюю платформу 3.
Основание 1 смонтировано на каркасе 4. Внутри каркаса 4 установлен привод вращения ведущей звездочки 5, а на основании смонтированы натяжные звездочки 6 и 7, охваченные бесконечнозамкнутой цепью 8. На промежуточной платформе 2 имеются выступы 9 и 10 с пазами, установленные на расстоянии, кратном шагу приводной цепи 8, и входящие в зацепление с цепью. На промежуточной платформе 2 установлены звездочки 11 и 12, охваченные бесконечно- замкнутой цепью 13, которая входит в зацепление с выступами 14 и 15 основания 1, установленными на расстоянии, кратном шагу цепи 13, а также с выступами 16 и 17 верхней платформы 3, расстояние между которыми также кратно шагу цепи 13.
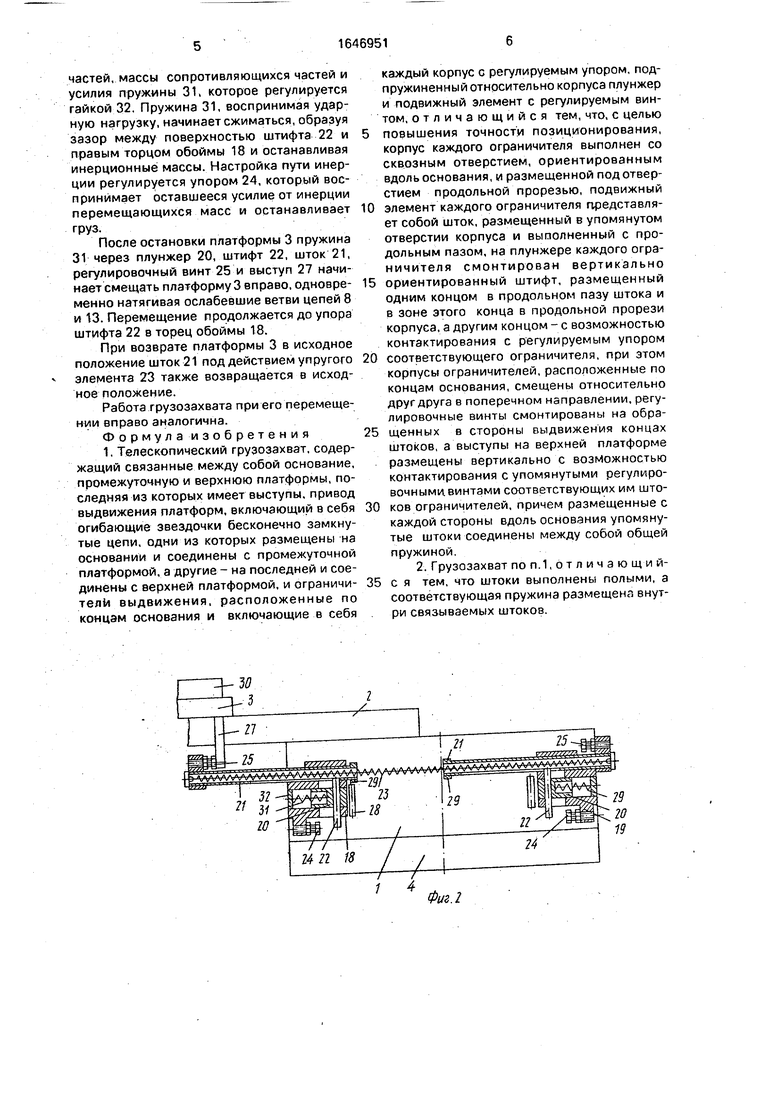
На основании 1 жестко установлены ог- раничители перемещения платформ, содержащие корпусы в виде обойм 18 и 19, оснащенных подпружиненными относительно них плунжерами 20. В верхней части каждой обоймы выполнено отверстие, в ко- тором с возможностью перемещения вдоль платформ установлен шток 21.
В обоймах 18 и 19 имеется вертикальная прорезь, в которой размещен штифт 22, закрепленный на плунжере 20. В каждом штоке 21 выполнены продольный паз, в котором установлен верхний конец штифта 22, и соосное отверстие, в котором размещен упругий элемент 23 в виде пружины, соединяющей штоки обойм, размещенные на одной из сторон основания. В нижней части каждой обоймы установлен регулируемый упор 24, а на противолежащих концах штоков установлены регулировочные вин- ты 25, смещенные относительно оси штоков 21 и друг друга в поперечном направлении. На обоих концах верхней платформы 3 смонтированы вертикальные выступы 26 и 27, установленные с возможностью взаимо-
действия с регулировочным винтом соответствующей обоймы.
На обоймах 18 и 19 расположены датчики 28, реагирующие на элементы (флажки) 29, укрепленные на концах штоков 21.
В исходном положении платформ, на верхней из которых лежит груз 30, штифт 22 под действием усилия пружины 31, регулируемого гайкой 32, взаимодействует с торцевой поверхностью продольного паза штока 21.
Штифт 22, расположенный одновременно в пазу обоймы и в пазу штока 21, предотвращает последний от поворота.
Регулируемые упоры 24 служат для ограничения перемещения штифта 22.
Телескопический грузозахват работает следующим образом.
При включении привода и передаче вращения ведущей звездочке 5 против часовой стрелки приводная цепь 8 посредством выступов 9 и 10 передает движение влево средней платформе 2 При перемещении промежуточной платформы влево звездочка 11 перематывает верхнюю ветвь цепи 13, так как нижняя ветвь цепи 13 зафиксирована выступами 14 и 15 основания 1. При этом верхняя платформа 3 цепью 13 посредством взаимодействия с выступами 16 и 17 перемещается влево. При выходе выступов 10, 15 и 16 из зацепления с роликами цепей 8 и 13 движение продолжает осуществляться посредством выступов 9, 14 и 17, взаимодействующих с роликами цепей 8 и 13. В момент движения, преодолевая сопротивление, левая ветвь цепи 8 и верхняя ветвь цепи 13,. являющиеся ведущими, натягиваются, а правая ветвь цепи 8 и нижняя ветвь цепи 13 являются ведомыми и не натянутыми. Затем при движении верхняя платформа 3 укрепленным на ней выступом 27 взаимодействуете винтом 25 и перемещается совместно со штоком 21, растягивая упругий элемент 23.
В конце движения платформ 2 и 3 по команде от датчика 28, срабатывание которого происходит в конце хода платформы 3 от элемента 29. укрепленного на конце штока 21, электродвигатели привода и тормоза (не показаны) выключаются. Тормоз замыкается на торможение, однако верхняя платформа 3 с грузом 30 и средняя платформа 2 перемещаются влево по инерции, выбирая люфт в ведомых ветвях цепей 8 и 13 и ликвидируя натяжение ведущих ветвей этих цепей
Одновремено поверхность продольного паза штока 21 взаимодействует с концом штифта 22, при этом нагрузка, приложенная к штоку, зависит от массы перемещающихся
частей, массы сопротивляющихся частей и усилия пружины 31, которое регулируется гайкой 32. Пружина 31, воспринимая ударную нагрузку, начинает сжиматься, образуя зазор между поверхностью штифта 22 и правым торцом обоймы 18 и останавливая инерционные массы. Настройка пути инерции регулируется упором 24, который воспринимает оставшееся усилие от инерции перемещающихся масс и останавливает груз.
После остановки платформы 3 пружина 31 через плунжер 20, штифт 22, шток 21, регулировочный винт 25 и выступ 27 начинает смещать платформу 3 вправо, одновременно натягивая ослабевшие ветви цепей 8 и 13. Перемещение продолжается до упора штифта 22 в торец обоймы 18.
При возврате платформы 3 в исходное положение шток 21 под действием упругого элемента 23 также возвращается в исходное положение.
Работа грузозахвата при его перемещении вправо аналогична.
Формула изобретения 1, Телескопический грузозахват, содержащий связанные между собой основание, промежуточную и верхнюю платформы, последняя из которых имеет выступы, привод выдвижения платформ, включающий в себя огибающие звездочки бесконечно замкнутые цепи, одни из которых размещены на основании и соединены с промежуточной платформой, а другие - на последней и соединены с верхней платформой, и ограничители выдвижения, расположенные по концам основания и включающие в себя
10
15
каждый корпус с регулируемым упором, подпружиненный относительно корпуса плунжер и подвижный элемент с регулируемым винтом, отличающийся тем, что, с целью повышения точности позиционирования, корпус каждого ограничителя выполнен со сквозным отверстием, ориентированным вдоль основания, и размещенной под отверстием продольной прорезью, подвижный элемент каждого ограничителя представляет собой шток, размещенный в упомянутом отверстии корпуса и выполненный с продольным пазом, на плунжере каждого ограничителя смонтирован вертикально ориентированный штифт, размещенный одним концом в продольном пазу штока и в зоне этого конца в продольной прорези корпуса, а другим концом - с возможностью контактирования с регулируемым упором 0 соответствующего ограничителя, при этом корпусы ограничителей, расположенные по концам основания, смещены относительно друг друга в поперечном направлении, регулировочные винты смонтированы на обращенных в стороны выдвижения концах штоков, а выступы на верхней платформе размещены вертикально с возможностью контактирования с упомянутыми регулировочными, винтами соответствующих им штоков ограничителей, причем размещенные с каждой стороны вдоль основания упомянутые штоки соединены между собой общей пружиной
2. Грузозахват поп.1,отличэющий- с я тем, что штоки выполнены полыми, а соответствующая пружина размещена внутри связываемых штоков.
5
0
5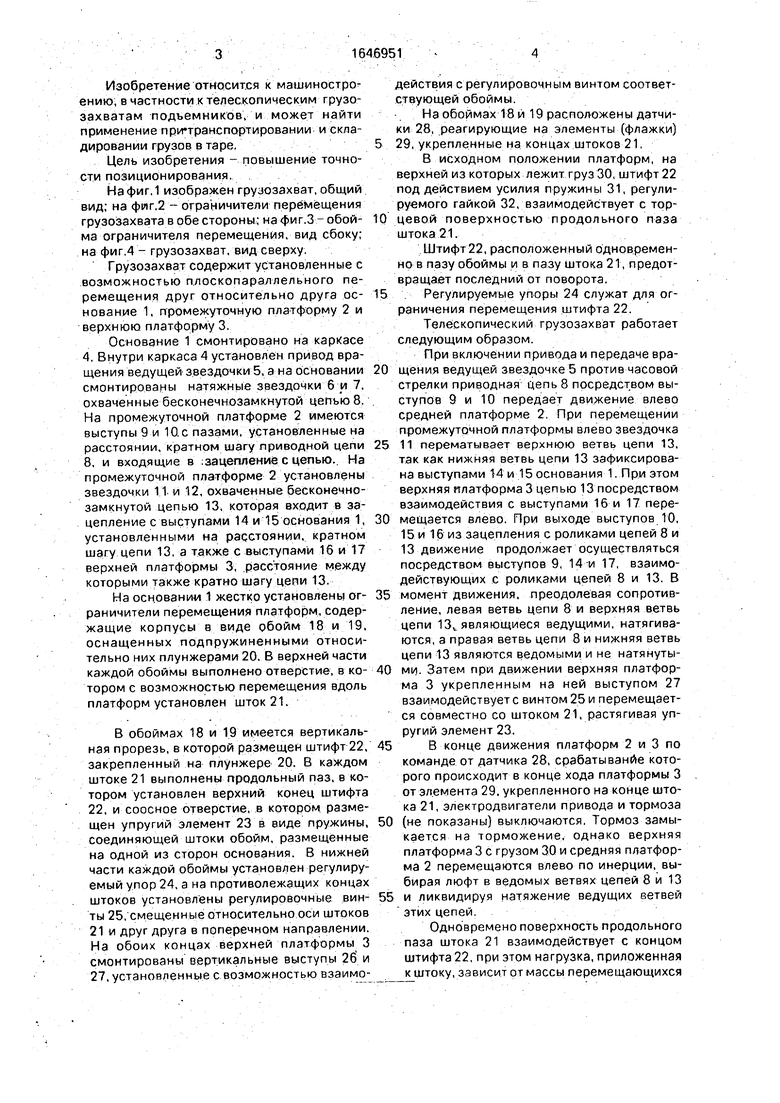
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический грузозахват | 1986 |
|
SU1384482A1 |
| Устройство рубки движущейся ленты древесного шпона с ножом и узлом его натяжения, включая механизм вертикального перемещения прижимного вала с натяжителем цепи | 2021 |
|
RU2807977C2 |
| Транспортирующее устройство | 1979 |
|
SU876515A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1034929A1 |
| УСТРОЙСТВО РУБКИ ДВИЖУЩЕЙСЯ ЛЕНТЫ ДРЕВЕСНОГО ШПОНА С НОЖОМ И МЕХАНИЗМОМ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ | 2009 |
|
RU2403148C1 |
| Телескопический захват | 1986 |
|
SU1321644A1 |
| Установка для резки листового проката | 1987 |
|
SU1470468A1 |
| ЛЕНТОЧНО-ПИЛЬНЫЙ СТАНОК | 1998 |
|
RU2139182C1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| Веломобиль | 1987 |
|
SU1512848A1 |
Изобретение относится к машиностроению и может найти применение при транспортировании и складировании грузов в таре. Цель изобретения - повышение точности позиционирования. Грузозахват содержит перемещающиеся друг относительно друга основание 1, промежуточную платформу 2 и верхнюю платформу 3 На промеU Л жуточной платформе 2 установлены звездочки 11 и 12, охваченные бесконечно- замкнутой цепью 13, которая входит в зацепление с выступами 14 и 15 основания 1 Бесконечнозамкнутая цепь 8 охватывает натяжные звездочки 6 и 7 и ведущую звездочку 5 и входит в зацепление с выступами 9 и 10 промежуточной платформы. На основании 1 жестко установлены ограничители перемещения платформ, содержащие корпуса в виде обойм 18 и 19, оснащенных плунжерами В обоймах 18 и 19 установлены штоки 21, имеющие продольные пазы, в которых установлены верхние концы штифтов, закрепленных на плунжере. 8 нижней части каждой обоймы установлен регулируемый упор, а на противоположных концах штоков имеются регулировочные винты, установленные с возможностью взаимодействия с регулировочным винтом соответствующей обоймы. 1 з п ф-лы, 4 ил.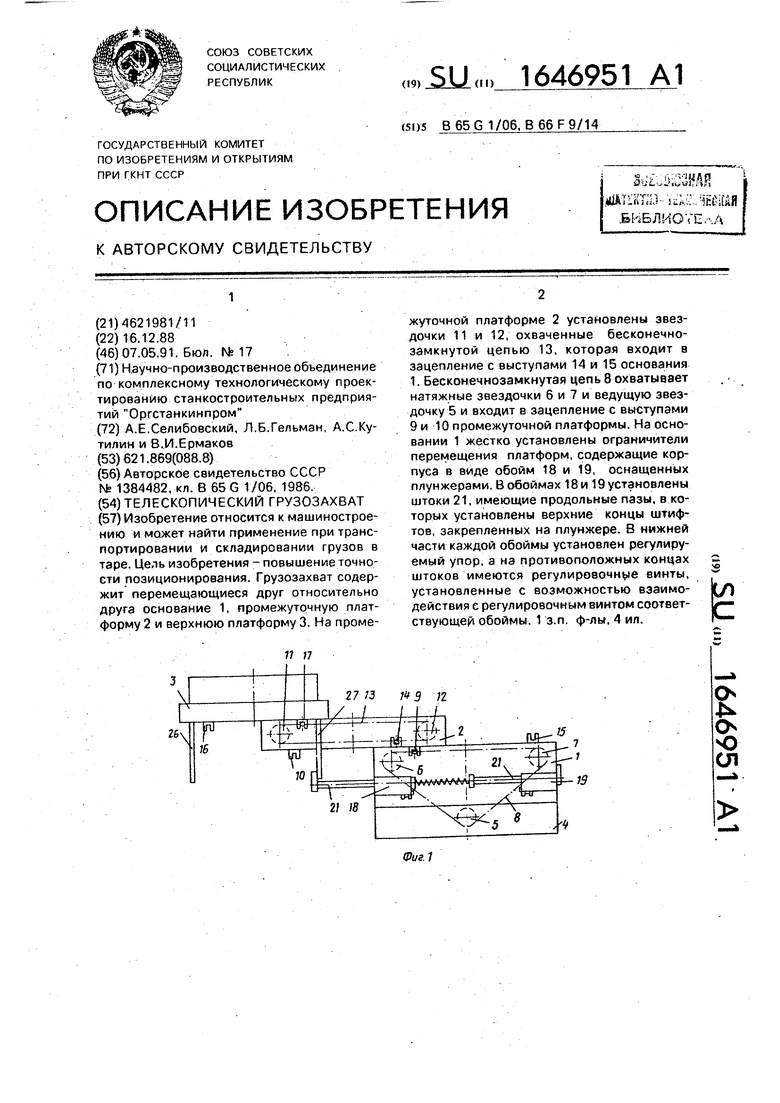
Фиг 2
25 1
фие.З
19
| Телескопический грузозахват | 1986 |
|
SU1384482A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
