Изобретение относится к используемому в машиностроении конвейерному транспорту, который предназначен для межоперационного транспортирования деталей в цехах промышленных предприятий, оснащенных роботами, функционирующими в автоматических линиях штучной подачи деталей на обработку.
Цель изобретения - повышение надежности работы конвейера.
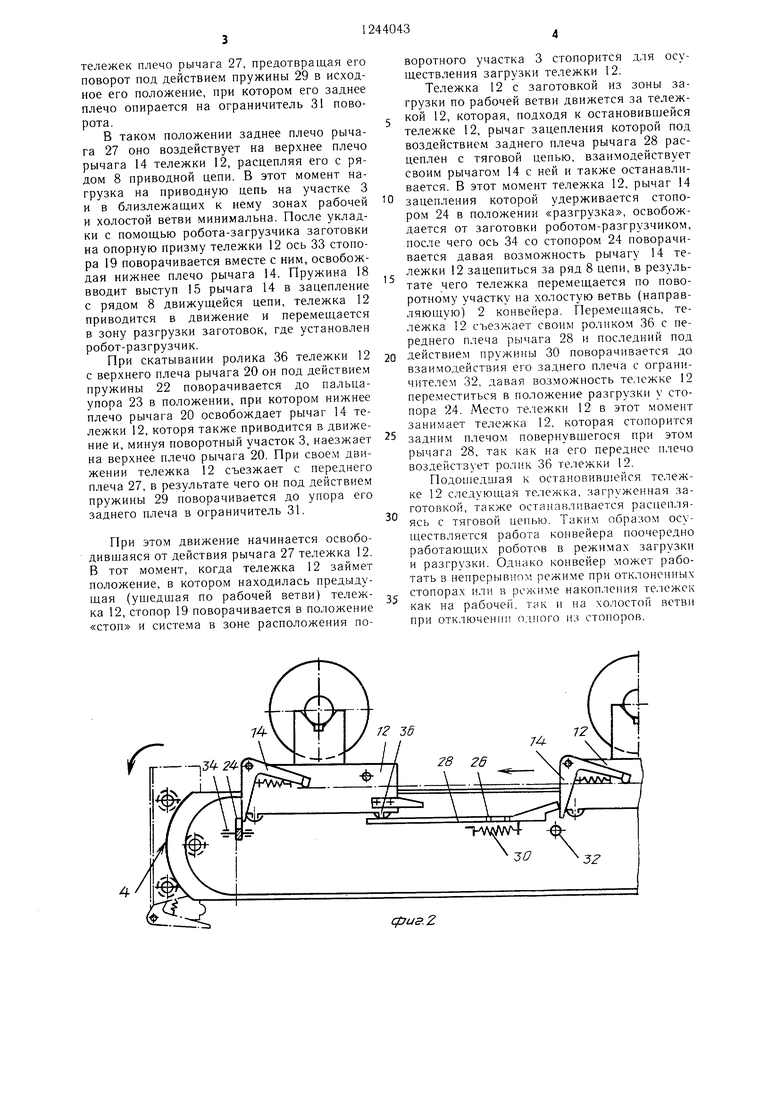
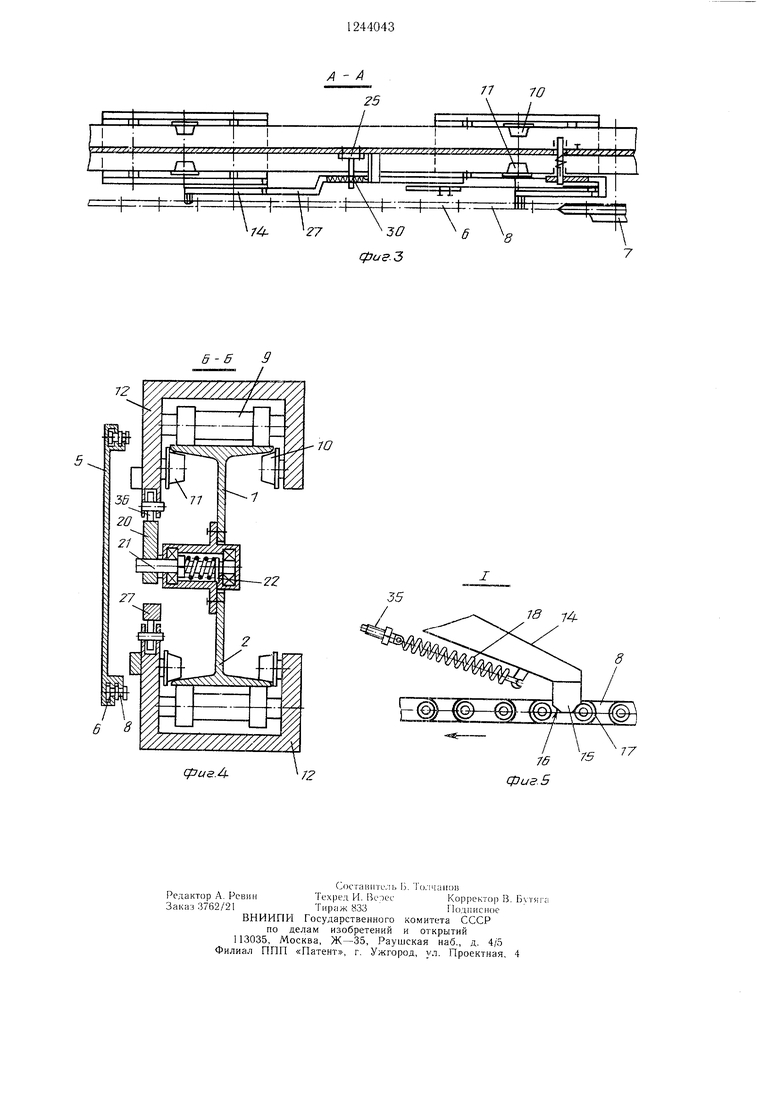
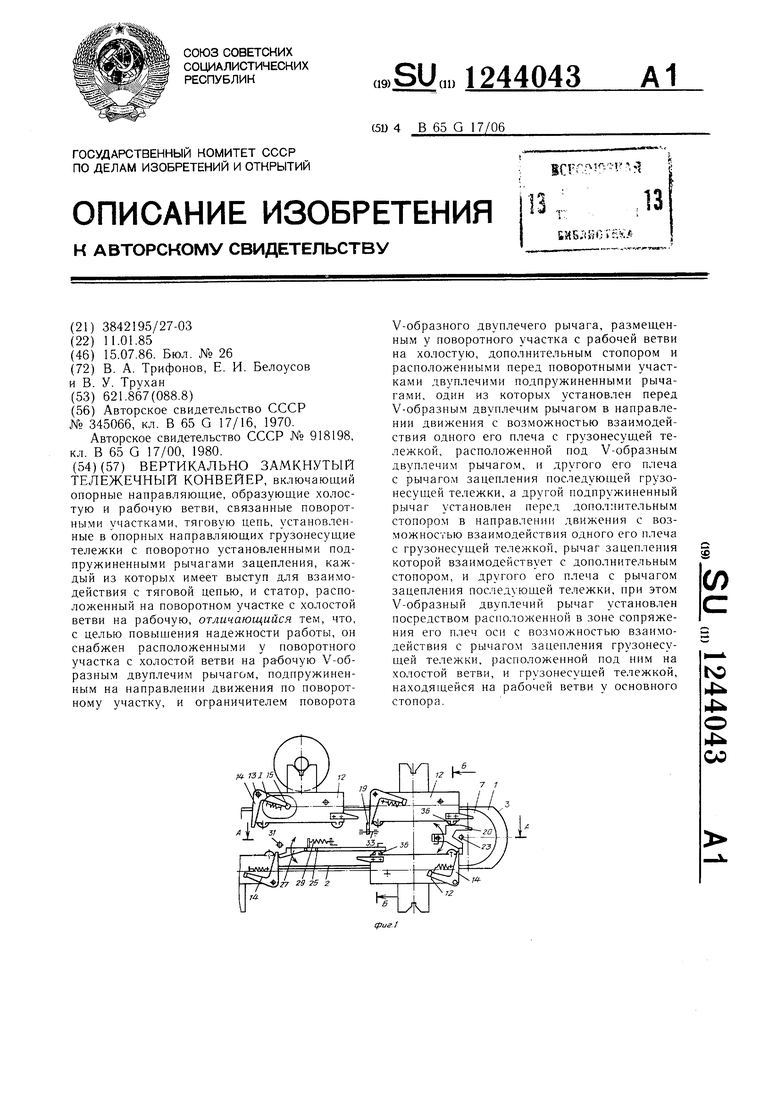
На фиг. 1 и 2 изображен предлагаемый конвейер, общий вид; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - узел I на фиг. 1.
Конвейер имеет опорные направляющие 1 и 2, выполненные в виде двутаврового монорельса, образующие соответственно рабочую и холостую ветви, которые связаны поворотными участками 3 и 4, направляющую 5 для двухрядной тяговой цепи с одним рядом 6, который натянут на приводную звездочку 7, натяжную звездочку (не показаны), и другим параллельным рядом 8. На направляющих с помощью роликов 9-11 установлены грузонесущие тележки 12, а поворотные участки 3 и 4 имеют серповидную форму, чтобы при прохождении роликов 9- 11 последние надежно удерживали грузоне- су1цую тележку на направляющих в трех точках и давали ей возможность катиться по поворотному участку. На тележках установлены изогнутые, расположенные с возможностью поворота на осях 13 в зоне их изогнутости, двуплечие рычаги 14, подпружиненные одним своим плечом выступом 15, имеющим скосы 16 и 17, с помоп ью пружин 18 к ряду 8 тяговой цепи так, что выступ 15 имеет возможность входить в пространство между роликами этого ряда цепи (фиг. 5).
У поворотного участка 3 расположен стопор 19 и V-образный двуплечий рычаг 20, установленный поворотно на расположенной в зоне сопряжения его плеч оси 21, подпружиненный пружиной 22 закручивания в направлении движения грузонесущих тележек по поворотному участку.
При этом V-образный рычаг 20 установлен с обеспечением возможности взаимодействия с рычагом 14 зацепления тележки 12, находящейся на холостой ветви, и тележкой 12, находящейся на рабочей ветви.
V-образный рычаг снабжен ограничителем поворота, выполненным в виде пальца 23, неподвижно закрепленного между плечами этого рычага.
У поворотного участка 4 установлен дополнительный стопор 24, а перед обоими поворотными участками 3 и 4 установлены с возможностью поворота на своих осях 25 и 26 двуплечие рычаги 27 и 28, подпружиненные соответственно пружинами 29 и 30 к ограничителям 31 и 32 их поворота, выполненных в виде неподвижных щтифтов.
При этом рычаг 27 расположен перед V-образным рычагом 20 в направлении перемещения грузонесущих тележек и установлен с возможностью обеспечения взаимо- действия переднего своего плеча с тележкой 12, рычаг 14 зацепления которой взаимодействует с нижним плечом рычага 20, и одновре.менной возможностью взаимодействия своего заднего, подпружиненного плеча с рычагом 14 последуюп ей тележки 12.
Другой рычаг 28 расположен перед стопором 24 по направлению перемещ.ения тележек с возможностью взаимодействия своего переднего плеча с тележкой 12, рычаг 14 зацепления которой имеет возможность взаимодействия со стопором 24, и одновременной возможностью взаимодействия своего заднего плеча с рычагом 14 зацепления последующей тележки 12.
Стопоры 19 и 24 выполнены в виде эксцентрично расположенных на осях 33 и 34
0 соответственно и жестко связанных с ни.ми эксцентричных кулачков. Оси 33 и 34 кинематически связаны с приводами их поворотов, которые дистанционно связаны с роботами, установленными в зонах загрузки и разгрузки заготовок (не показаны).
Рчонвейер работает следующим образом.
Привод (не показан) вращает звездочку 7 и передает движение двумя рядами 6 и 8 приводной цепи, которая опирается на направляющие 5.
Тележки 12, рычаги 14 зацеплепия которых своими выступами 15 под действием пружин 18 зацепляются с роликами ряда 8 цепи, катятся на роликах 9--11 по противоположным поверхностям направляющих 1 и 2 рабочей и холостой ветви соответственно.
,-Усилие прижатия рычагов 14 свои.ми
выступами 15 к цепи зависит от веса транспортируемой заготовки и регулируется резьбовым приспособлением 35.
При повороте оси 33 стопора в положение «Загрузка нижнее плечо рычага 14
зацепления движущейся тележки 12 упирается в его торец, рычаг 14 поворачивается на своей оси 13, растягивая пружину 18, и занимает положение, при котором его верхнее плечо приподпимается, выводя выстч п 15 из зацепления с роликами ряда 8 цепи.
S Тележка 12 останавливается в положении, при котором ее ролик 36 опирается на верхнее плечо V-образпого оычага 20, предотвращая его соответствую1ций поворот па осп 21 под действием пружины 22. В этот
Q момент поворотный участок 3 свободен, так как нижнее плечо рычага 20 занимает такое положение, при котором подошедшая по холостой ветви тележка 12 упирается в это плечо верхним плечом рычага 14 зацеплепия. При этом нижнее плечо рычага 14 этой
5 тележки, растянув пружину 18, выводит из зацеплепия с рядом 8 цепи свой выступ 15. Ролик 36 тележки 12 при этом опирается на переднее в паправлеиии перемеп1ения
тележек плечо рычага 27, предотвращая его поворот под действием пружины 29 в исходное его положение, при котором его заднее плечо опирается на ограничитель 31 поворота.
В таком положении заднее плечо рычага 27 оно воздействует на верхнее плечо рычага 14 тележки 12, расцепляя его с рядом 8 приводной цепи. В этот момент нагрузка на приводную цепь на участке 3 и в близлежащих к нему зонах рабочей и холостой ветви минимальна. После укладки с помощью робота-загрузчика заготовки на опорную призму тележки 12 ось 33 стопора 19 поворачивается вместе с ним, освобождая нижнее плечо рычага 14. Пружина 18 вводит выступ 15 рычага 14 в зацепление с рядом 8 движущейся цепи, тележка 12 приводится в движение и перемещается в зону разгрузки заготовок, где установлен робот-разгрузчик.
При скатывании ролика 36 тележки 12 с верхнего плеча рычага 20 он под действием пружины 22 поворачивается до пальца- упора 23 в положении, при котором нижнее плечо рычага 20 освобождает рычаг 14 тележки 12, которя также приводится в движение и, минуя поворотный участок 3, наезжает на верхнее плечо рычага 20. При своем движении тележка 12 съезжает с переднего плеча 27, в результате чего он под действием пружины 29 поворачивается до упора его заднего плеча в ограничитель 31.
При этом движение начинается освобо- дивщаяся от действия рычага 27 тележка 12. В тот момент, когда тележка 12 займет положение, в котором находилась предыдущая (ущедщая по рабочей ветви) тележка 12, стопор 19 поворачивается в положение «стоп и система в зоне расположения по0
5
0
5
0
воротного участка 3 стопорится для осуществления загрузки тележки 12.
Тележка 12 с заготовкой из зоны загрузки по рабочей ветви движется за тележкой 12, которая, подходя к остановившейся тележке 12, рычаг зацепления которой под воздействием заднего плеча рычага 28 расцеплен с тяговой цепью, взаимодействует своим рычагом 14 с ней и также останавливается. В этот момент тележка 12, рычаг 14 зацепления которой удерживается стопором 24 в положении «разгрузка, освобождается от заготовки роботом-разгрузчиком, после чего ось 34 со стопором 24 поворачивается давая возможность рычагу 14 тележки 12 зацепиться за ряд 8 цепи, в результате чего тележка перемещается по поворотному участку на холостую ветвь (направляющую) 2 конвейера. Перемещаясь, тележка 12 съезжает своим роликом 36 с переднего плеча рычага 28 и последний под действием пружины 30 поворачивается до взаимодействия его заднего плеча с ограничителем 32. давая возможность тележке 12 переместиться в положение разгрузки у стопора 24. Место тележки 12 в этот момент занимает тележка 12, которая стопорится задним плечом повернувшегося при этом рычага 28, так как на его переднее плечо воздействует ролик 36 тележки 12.
Подои1едшая к остановившейся тележке 12 следующая тележка, загруженная заготовкой, также останавливается расцепляясь с тяговой цепью. Таким образом осуществляется работа конвейера поочередно работающих роботов в режимах загрузки и разгрузки. Однако конвейер может работать Б непрерывном режиме при отклоненных стопорах в режиме накопления тележек как на рабочей, так и на холостой ветви при отключении одного из стопоров.
-P(WV4 -ф J/7
JZ
сриг.г
74
27
О фиг. 3
8
7
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикально-замкнутый тележечный конвейер | 1987 |
|
SU1528699A1 |
| Вертикально-замкнутый накопительный конвейер | 1985 |
|
SU1399230A1 |
| Транспортная система | 1982 |
|
SU1167115A1 |
| Тележечный конвейер | 1988 |
|
SU1578053A1 |
| Конвейерная система для транспортирования изделий на тележках | 1978 |
|
SU791571A1 |
| Устройство для передачи грузов | 1989 |
|
SU1641744A1 |
| РАЗГРУЗОЧНЫЙ УЗЕЛ ОБЖИГОВОЙ КОНВЕЙЕРНОЙ МАШИНЫ БЕЗ ХОЛОСТОЙ ВЕТВИ | 1992 |
|
RU2067272C1 |
| Тележечный конвейер | 1974 |
|
SU518428A1 |
| Вертикально-замкнутый тележечный конвейер | 1986 |
|
SU1364565A1 |
| Устройство для сцепления грузовых тележек с тяговой цепью вертикальнозамкнутоас тележенного конвейера | 1976 |
|
SU608718A1 |
12
6 8
фиг.
74
8
фиг. 5
| УСТРОЙСТВО для ПОВОРОТА ИЗДЕЛИЯ ВОКРУГ | 0 |
|
SU345066A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Тележечный конвейер | 1980 |
|
SU918198A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
