: Изобретение относится к электротехнике, в частности к электроприводу jIaлoй мощности, и может быть использо- аано для синхронного вращения меха- с iичecки не связанных валов в широком Диапазоне изменения нагрузки.
I Целью изобретения является повьше- 4ие динамических показателей.
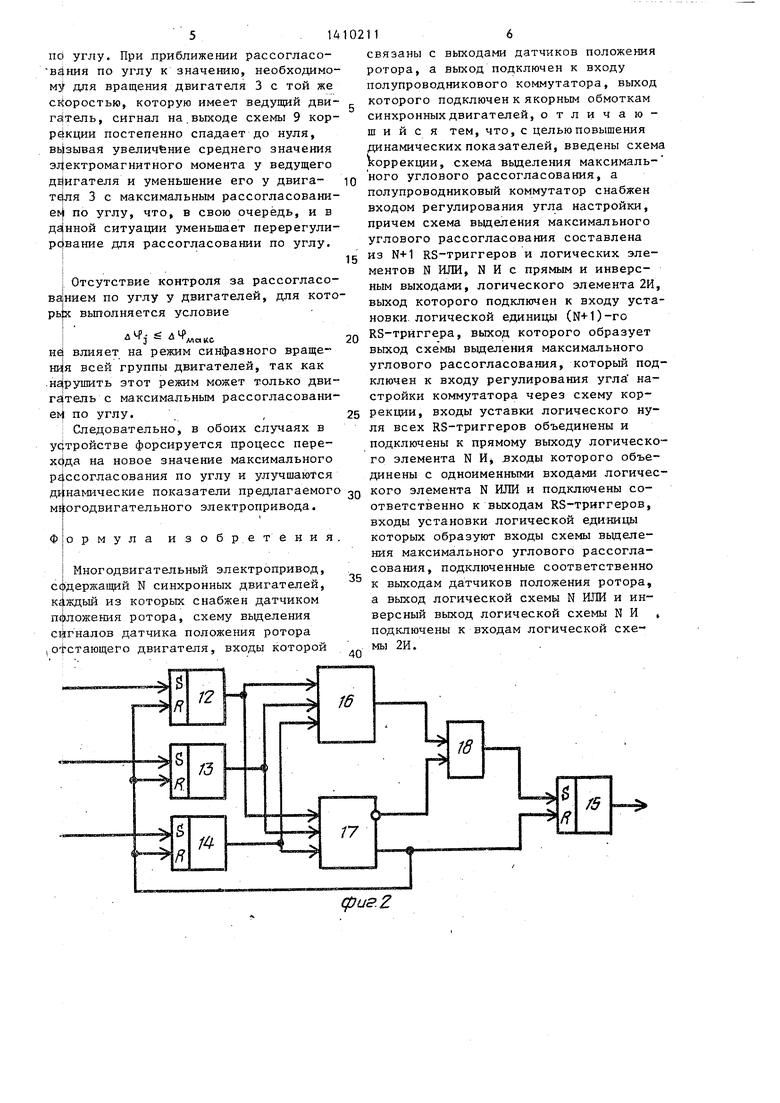
I На фиг. 1 изображена структурная Q схема трехдвигательного электропривода; на фиг. 2 - схема вьзделания максимального углового несогласования; ъа фиг, 3 - временные диаграммы сигналов на выходе элементов электропри- fs вода.
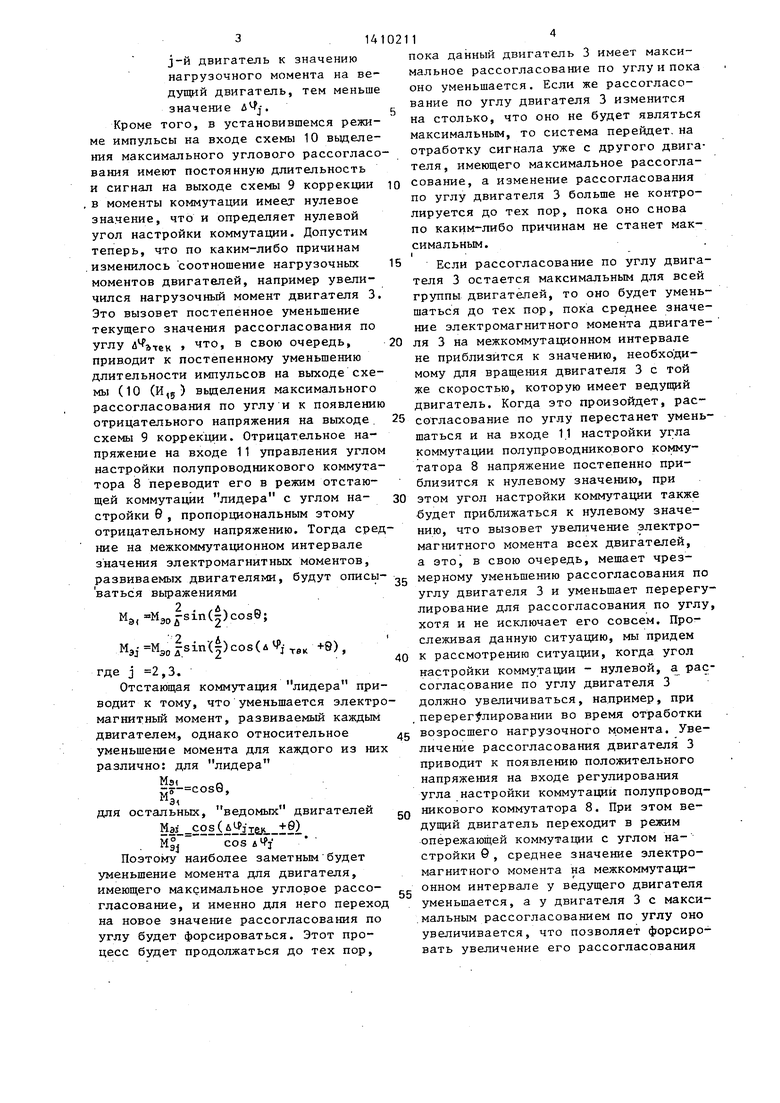
Многодвигательный электропривод содержит N синхронных двигателей 1-3 (фиг. 1), каждый из которых снабжен aтчикaми 4-6 положения ротора, схе- 20 му 7 вьщеления сигналов датчика поло- женил ротора отстающего двигателя, в коды которой связаны с выходами дат- .чиков 4-6 положения ротора, а выход подключен к входу полупроводникового 25 к|оммутатора .8. Выход коммутатора 3 подключен к якорньм обмоткам синхрон- двигателей 1-3, кроме того электропривод содержит схему 9 коррекции и схему 10 вьщеления максимального уг-дд лового рассогласования, а полупровод-- никовый коммутатор 8 снабжен входом 11 регулирования угла настройки. Схема 10 вьщеления максимального углового рас согласования включает в себя N+1 RS-триггеров 12-15 (фиг. 2), логичес-- элементы N ИЛИ 16;, N И 1 7 с прямым И инверсным выходами 2И 18. Выход ло- г ического элемента 2И 18 подключен К входу уставки логической единицы
(:N+1)-ro RS-триггера 15, выход ко- i oporo является выходом схемы 10 аьщеления максимального углового рассогласования, который через схе- гу 9 коррекции подключен к входу 11 р егулирования угла опережения комму- татора 8. Входы уставки логического нуля RS-триггеров 12-15 объединены и подключены к прямому выходу логического элемента N И 17, входы которо- объединены с одноименными входами 50 логического элемента N ИЛИ 16 и подключены соответственно к выходам RS- триггеров 12-14. Входы уставки логи- Ч1еской единицы RS-триггеров 12-14 образуют соответствующие входы схемы П|Одключенные к выходам датчиков 4-6 положения ротора. Выход логической схемы N ИЖ 16 и инверсный выход логи40
ческой схемы N И 17 подключены к вхог дам логической схемы 2 И 18.
Многодвигательный электропривод работает следующим образом.
В установившемся режиме ротор одного из двигателей, допустим ротор двигателя 1 отстает от роторов остгшьных двигателей на углы л,л и пусть (фиг. 3). При этом в соответствии с принципом работы схемы 7 выделения сигнала датчика положения ротора отстающего двигателя на вход коммутатора В поступает последовательность импульсов И от датчика 4 двигателя 1, а на входе управления углом настройки коммутатора 8 сигнал имеет нулевое значение. Тогда двигатель 1 является ведущим в группе или лидером и находится в режиме самокоммутации с нулевым углом настройки коммутатора, а остальные двигатели - ведомые и находятся в режиме шагового вращения.
Среднее на межкоммутационном интер вале значение электромагнитного момента Мд,, развиваемого двигателем 1, равно
о 2 . л Мэ, Мэо7 2 где Д - межкоммутационный интервал
(в эл. радианах);
Мао максимальное значение электромагнитного момента. Среднее значение электромагнитного момента Мдо, развиваемого j-ым двигателем, находящимся в режиме шагового вращения, определяется выражением.
M M3Q--sin()cos
в установившемся режиме для. всех игателей выполняется равенство о (рг
3J MHi+|- c,, : .
е Мц- - момент нагрузки на j-й
двигатель;
QO среднее на межкоммутационном интервале значение угловой скорости двигателя . в установившемся режиме; эквивалентное потокосцепле- кие одного синхронного двигателя;
R - активное сопротивление обмотки синхронного двигателя, причем,чем ближе значение нагрузочного момента на
5
10
15
j-й двигатель к значению нагрузочного момента на ведущий двигатель, тем меньше значение &.
Кроме того, в установившемся режиме импульсы на входе схемы 10 выделения максимального углового рассогласования имеют постоянную длительность и сигнал на выходе схемы 9 коррекции в моменты коммутации имеет нулевое значение, что и определяет нулевой угол настройки коммутации. Допустим теперь, что по каким-либо причинам изменилось соотношение нагрузочных моментов двигателей, например увеличился нагрузочный момент двигателя 3. Это вызовет постепенное уменьшение текущего значения рассогласования по углу тo, в свою очередь, приводит к постепенному уменьшению лительности импульсов на выходе схемы (10 (И,д ) вьделения максимального рассогласования по углу и к появлению отрицательного напряжения на выходе схемы 9 коррекции. Отрицательное напряжение на входе 11 управления углом настройки полупроводникового коммутатора 8 переводит его в режим отстаюей коммутации лидера с углом на- ЗО стройки 6, пропорциональным этому отрицательному напряжению. Тогда средние на межкоммутационном интервале значения электромагнитных моментов.
20
25
развиваемых двигателями, будут описы- g мерному уменьшению рассогласования по ваться выражениями
л
MS, (|)созе;
углу двигателя 3 и уменьшает перерегулирование для рассогласования по углу, хотя и не исключает его совсем. Прослеживая данную ситуацию, мы придем
% Мэо |sin-(|)cos(4 M j +9) ,
где j 2,3.
Отстающая коммутация лидера приводит к тому, что уменьшается электромагнитный момент, развиваемый каждьм двигателем, однако относительное уменьшение момента для каждого из них различно: для лидера
Мэ о ,
э для остальных, ведомых двигателей
MaJ.cos()
Mlj cos Aifj Поэтому наиболее заметным будет уменьшение момента для двигателя, имеющего максимальное угловое рассогласование, и именно для него переход на новое значение рассогласования по углу будет форсироваться. Этот процесс будет продолжаться до тех пор,
0
5
О
0
5
пока данный двигатель 3 имеет максимальное рассогласование по углу и пока оно уменьшается. Если же рассогласование по углу двигателя 3 изменится на столько, что оно не будет являться максимальным, то система перейдет, на отработку сигнала уже с другого двигателя, имеющего максимальное рассогласование, а изменение рассогласования по углу двигателя 3 больше не контролируется до тех пор, пока оно снова по каким-либо причинам не станет максимальным. I
Если рассогласование по углу двигателя 3 остается максимальным для всей группы двигателей, то оно будет уменьшаться до тех пор, пока среднее значение электромагнитного момента двигателя 3 на межкоммутационном интервале не приблизится к значению, необходимому для вращения двигателя 3 с той же скоростью, которую имеет ведущий двигатель. Когда это произойдет, рассогласование по углу перестанет уменьшаться и на входе 1.1 настройки угла коммутации полупроводникового коммутатора 8 напряжение постепенно приблизится к нулевому значеник, при этом угол настройки коммутации также будет приближаться к нулевому значению, что вызовет увеличение электромагнитного момента всех двигателей, а это, в свою очередь, мешает чрезмерному уменьшению рассогласования по
углу двигателя 3 и уменьшает перерегулирование для рассогласования по углу, хотя и не исключает его совсем. Прослеживая данную ситуацию, мы придем
к рассмотрению ситуации, когда угол настройки коммутации - нулевой, а рассогласование по углу двигателя 3 должно увеличиваться, например, при пepepeгtлиpoвaнии во время отработки
возросшего нагрузочного момента. Увеличение рассогласования двигателя 3 приводит к появлению положительного напряжения на входе регулирования угла настройки коммутации полупроводникового коммутатора 8. При этом ведущий двигатель переходит в режим опережающей коммутации с углом на- стройки 0, среднее значение электромагнитного момента на межкоммутационном интервале у ведущего двигателя уменьшается, а у двигателя 3 с максимальным рассогласованием по углу оно увеличивается, что позволяет форсировать увеличение его рассогласования
5. 14
net углу. При приближении рассогласо- вйния по углу к значению, необходимо- Mjf для вращения двигателя 3 с той же скоростью, которую имеет ведущий дви- гётелъ, сигнал на.выходе схемы 9 кор- постепенно спадает до нуля, вызывая увеличение среднего значения э; ектромагнитного момента у ведущего дЕ|игателя и уменьшение его у двига- 3 с максимальным рассогласовани- ei по углу, что, в свою очередь, и в данной ситуации уменьшает перерегулиррвание для рассогласовании по углу.
j
I Отсутствие контроля за рассогласо- по углу у двигателей, для кото рь1х вьш олняется условие
,.c
влияет на режим синфазного вращене
ния всей группы двигателей, так как .нарушить этот режим может только дви- с максимальным рассогласовани- ei по углу.
Следовательно, в обоих случаях в устройстве форсируется процесс пере- на новое значение максимального р4ссогласования по углу и улучшаются
Д намические показатели предлагаемого
мыогодвигательного электропривода.
Ф
ормула изобр.е тения
I Многодвигательный электропривод, С(Ьдаржашр й N синхронных двигателей, каждый из которых снабжен датчиком положения ротора, схему вьщеления С1 гналов датчика положения ротора I отстающего двигателя, входы которой
116
связаны с выходами датчиков положения ротора, а выход подключен к входу полупроводникового коммутатора, выход которого подключен к якорным обмоткам синхронных двигателей, отличающийся тем, что, с целью повышения динамических показателей, введены схема
коррекции, схема выделения максималь- ного углового рассогласования, а полупроводниковый коммутатор снабжен входом регулирования угла настройки, причем схема вьщеления максимального углового рассогласования составлена из N+1 RS-триггеров и логических элементов N ИЛИ, N И с прямым и инверсным выходами, логического элемента 2И, выход которого подключен к входу установки, логической единицы (N+1)-ro RS-трйггера, вьпсод которого образует выход схемы вьщеления максимального углового рассогласования, который подключен к входу регулирования угла настройки коммутатора через схему кор- рекции, входы уставки логического нуля всех RS-триггеров объединены и подключены к прямому выходу логического элемента N И входы которого объединены с одноименными входами логического элемента N ИЛИ и подключены соответственно к выходам RS-триггеров, входы установки логической единицы которых образуют входы схемы выделения максимального углового рассогласования, подключенные соответственно к выходам датчиков положения ротора, а выход логической схемы N ИЛИ и инверсный выход логической схемы N И , подключены к входам логической схемы 2И. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1973 |
|
SU520684A2 |
| Многодвигательный электропривод | 1981 |
|
SU1001420A1 |
| Балансирующее устройство многодвигательного электропривода | 1980 |
|
SU875567A1 |
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
| Способ регулирования частоты вращения вентильного двигателя и устройство для его осуществления | 1988 |
|
SU1679594A1 |
| Многодвигательный электропривод | 1981 |
|
SU1023613A2 |
| Вентильный электропривод | 1990 |
|
SU1767688A1 |
| Многодвигательный электропривод | 1978 |
|
SU942232A1 |
| Многодвигательный электропривод | 1972 |
|
SU445102A1 |
| Частотно-управляемый синхронный электропривод | 1985 |
|
SU1317634A2 |
Изобретение относился к электротехнике и может быть использовано для синхронного вращения механически не связанных валов в широком диапазоне изменения нагрузки. Целью изобретения является повышение динамических показателей. С этой целью в многодвигательный электропривод введены схема 9 коррекции, схема 10 вьзделения максимального углового рассогласования, а полупроводниковый коммутатор 8 снабжен входом 11 регулирования угла настройки, подключенным через схему 9 коррекции к выходу схемы 10. Входы схемь 10 подключены к выходам датчиков 4-6 положения роторов синхронных двигателей 1-3. В результате во всех режимах управления многодвигательным электроприводом форсируется процесс перехода на новое значение максимального рассогласования по углу и устраняется перерегулирование при переходе на новый режим работы вследствие изменения нагрузки на одном из двигателей 1-3. 3 ил. S СЛ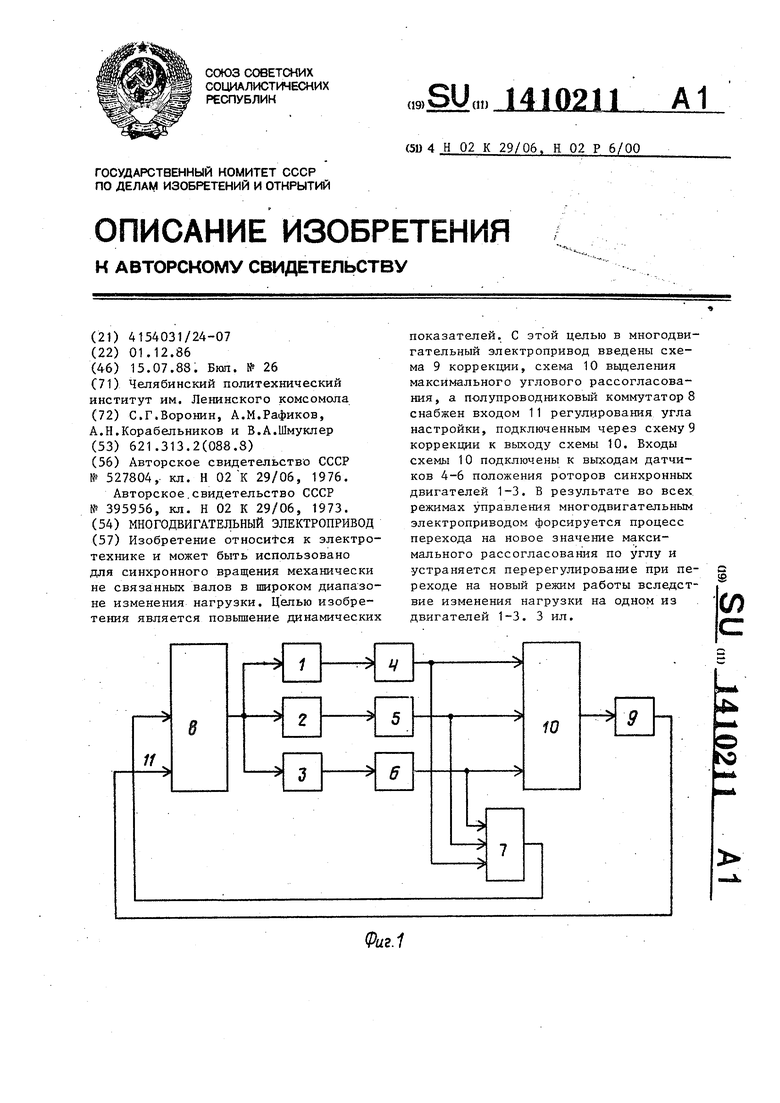
фиг. г
| Вентильный электродвигатель | 1974 |
|
SU527804A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ВПТБ | 0 |
|
SU395956A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
