От датчика, полосе(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1994 |
|
RU2091999C1 |
| Система управления положением сельскохозяйственных орудий, агрегатируемых на тракторном тандеме | 1990 |
|
SU1812342A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКОЙ НАВЕСНОЙ СИСТЕМОЙ ТРАКТОРА | 1973 |
|
SU385547A1 |
| Гидросистема сельскохозяйственного трактора | 1989 |
|
SU1710869A1 |
| Колесный сельскохозяйственный трактор | 1987 |
|
SU1419542A1 |
| Регулятор гидросистемы управления сельскохозяйственными орудиями | 1990 |
|
SU1764533A1 |
| Регулятор гидросистемы управления положением рабочего органа сельскохозяйственной машины | 1989 |
|
SU1701135A1 |
| Регулятор гидросистемы управления сельскохозяйственными орудиями | 1989 |
|
SU1681748A1 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1618301A1 |
| Гидравлическая система управления навесными орудиями трактора | 1972 |
|
SU441881A1 |
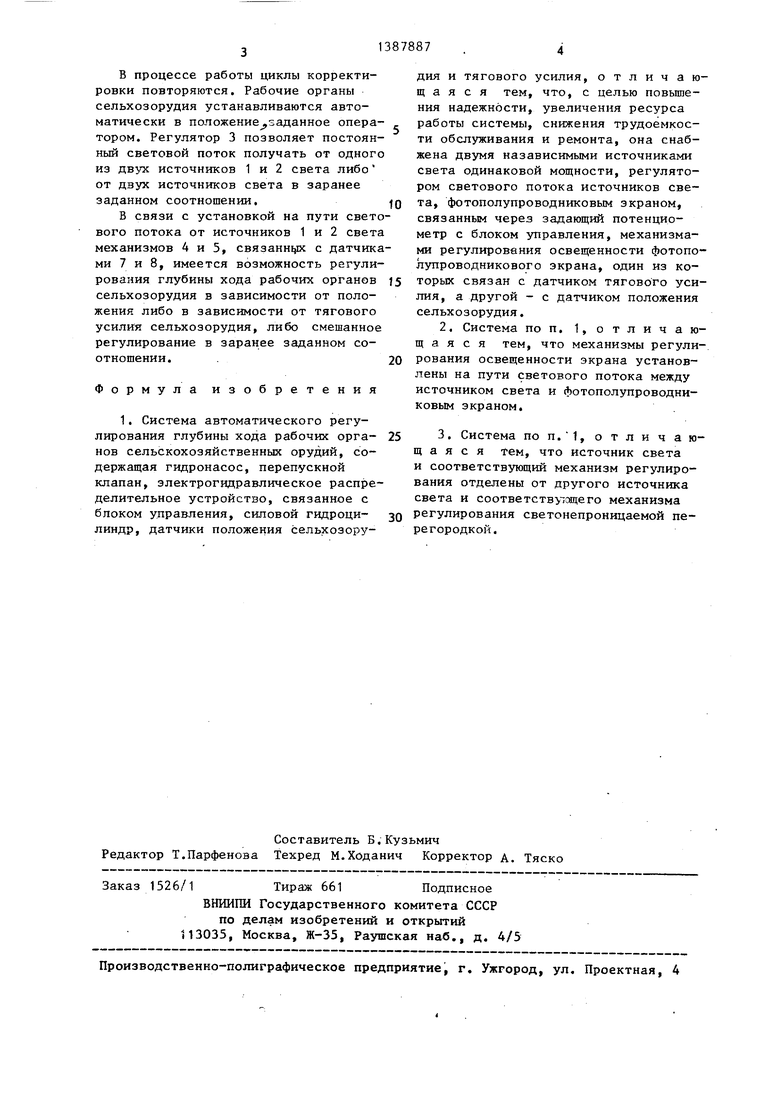
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам автоматического ;управления сельскохозяйственными орудиями. Цель изобретения - повышение надежности и ресурса работы системы, снижение трудоемкости обслуживания и ремонта. Сигналы от датчика 7 тягового усилия н датчика 8 положения сель- хозорудия с помощью механизмов 4 и 5 изменяют освещенность фотополупроводникового экрана 6. Это ведет к изменению сигнала на выходе блока 10 управления, который включает соответствующий электромагнит гидравлического распределительного устройства 11 и направляет поток масла от гидронасоса 12 в соответствующую полость гидроцилиндра 14 для подъема или заглубления рабочих органов сельхозорудия. 2 з.п. ф-лы, 1 ил.
HI- k
/ ния с/х opf/ffuff
III 9
/
1
S
От датчика тягового усиI AUft
СО СХ)
00
00
vj
/5
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам автоматического управления сельскохозяйственными орудиями.
Цель изобретения - повьппение надежности и ресурса работы системы, снижение трудоемкости обслуживания и ремонта.
На чертеже изображена блок-схема предлагаемой системы.
Система автоматического регулиро- вания состоит из источников 1 и 2 света равной мощности, регулятора 3 светового потока, которьй связан с источниками 1 и 2, механизмов А и 5 регулирования освещенности фотополупроводникового экрана 6, которые связаны соответственно с датчиком 7 тя- гового усилия сельсхозорудия и датчиком 8 положения сельхозорудия, задающего потенциометра 9, блока 10 управления, гидравлического распределительного устройства 11 с электроприводом, гидронасоса 12, перепускного клапана 13, силового гидроцилиндра 14 и источника 15 электропитания.
Система регулирования работает сле дукяцим образом.
Перед началом работы рукояткой потенциометра 9 устанавливают определенную величину сопротивления г, соответствующую выбранной глубине хода рабочих органов сельхозорудия. При .этом в цепи фотополупроводниково- го экрана 6, задающего потенциометра 9 и блока 10 управления протекает ток величина которого определяется из соотношения
Ъ
V
R
ЭДС источника 15 электропитания;
суммарное сопротивление потенциометра 9 (г), фотополупроводникового экрана 6
(г,) и соотретствующей цепи - водникового экрана 6 источниками 1 и
блока 10 управления (rj const).
При этом блок 10 управления йключа- ет соответствующий электромагнит гид2 света, что ведет к уменьшению входного сигнала на входе блока управления. Подъем рабочих органов происходит до тех пор, пока входной сигнал
рораспределительного устройства 11 и I не достигнет величины Iconsi- После
этого гидрораспределительное устройство 11 устанавливается в нейтральное положение, принудительньй подъем орудия прекращается.
направляет поток масла из гидронасоса 12 в соответствующую полость гидроцилиндра 14 через перепускной клапан 13..
5 0 5
0
0
5
5
Происходит заглубление рабочих органов сельхозорудия. При этом изменяются сигналы от датчиков 8 и 7 положения сельхозорудия и тягового усилия соответственно,которые через механизмы 5 и 4 соответственно изменяют (увеличивают) освещенность фото- полупроводникобого экрана 6 источниками 1 и 2 света.
Пропорционально изменению освещенности изменяется внутреннее сопротивление фотополупроводникового экрана 6 (г ), что влечет за собой изменение входного сигнала блока 10 управления (величина тока увеличивается). Опускание рабочих органов происходит до тех пор, пока входной сигнал не достигнет величины , при котором на выходе блока управления отсутствует управляющий сигнал. В этом случае гидрораспределительное устройство 11 устанавливается в нейтральное положение, принудительное заглубление прекращается. Гидронасос 12 направляет поток масла через перепускной клапан 13 на слив.
При изменении условий работы (чрезмерное заглубление рабочих органов) изменяются сигналы от датчиков 8 и 7, которые с помощью механизмов 5 и 4 изменяют (увеличивают) освещенность фотополупроводникового экрана 6, что ведет к увеличению сигнала на входе блока управления,j которьй превышает величину Icons-t I Icons-j) При этом на выходе блока 10 управления появляется сигнал, которьй включает соответствующий электромагнит гидрораспределительного устройства 11 и направляет поток масла от гидронасоса 12 в соответствующую полость гидроцилиндра 14, происходит подъем сельхозорудия.
В процессе подъема рабочих органов сельхозорудия изменяются сигналы от датчиков 8 и 7 положения и тягового усилия соответственно, которые с помощью механизмов 5 и 4 изменяют (уменьшают) освещенность фотополупроводникового экрана 6 источниками 1 и
2 света, что ведет к уменьшению входного сигнала на входе блока управления. Подъем рабочих органов происходит до тех пор, пока входной сигнал
I не достигнет величины Iconsi- После
этого гидрораспределительное устройство 11 устанавливается в нейтральное положение, принудительньй подъем орудия прекращается.
В процессе работы циклы корректировки повторяются. Рабочие органы сельхозорудия устанавливаются автоматически в положение заданное оператором. Регулятор 3 позволяет постоянный световой поток получать от одного из двух источников 1 и 2 света либо от двух источников света в заранее заданном соотношении.
В связи с установкой на пути светового потока от источников 1 и 2 света механизмов 4 и 5, связаннЕ с датчиками 7 и 8, имеется возможность регулирования глубины хода рабочих органов сельхозорудия в зависимости от положения либо в зависимости от тягового усилия сельхозорудия, либо смешанное регулирование в заранее заданном соотношении.
Формула изобретения
дия и тягового усилия, отличающаяся тем, что, с целью повышения надежности, увеличения ресурса работы системы, снижения трудоемкости обслуживания и ремонта, она снабжена двумя назависимыми источниками света одинаковой мощности, регулятором светового потока источников света, фотополупроводниковым экраном, связанным через задающий потенциометр с блоком управления, механизмами регулирования освещенности фотополупроводникового экрана, один из которых связан с датчиком тягового усилия, а другой - с датчиком положения сельхозорудия.
и соответствующий механизм регулирования отделены от другого источника света и соответств 1С)щего механизма регулирования светонепроницаемой перегородкой.
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1975 |
|
SU668636A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
